
一种智能交互机器人的支撑底座.pdf

景福****90


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能交互机器人的支撑底座.pdf
本发明涉及智能交互机器人技术领域,且公开了一种智能交互机器人的支撑底座,包括底盘,所述底盘的内部设置有动力机构,所述底盘的上表面固定连接有四个支撑弹簧,四个所述支撑弹簧的顶端固定连接有支撑箱,所述支撑箱内部的底壁开设有滑槽,所述滑槽的表面设置有调节机构,所述支撑箱内部的两侧均固定连接有伸缩板。该智能交互机器人的支撑底座,通过动力机构能够给调节机构和调整装置带来动力,从而能够使该支撑底座能够适用于不同大小的机器人组件,能够有效减小购买成本,从而能够使利益更大化,同时调整装置能够使机器人组件在移动时始终保持与
一种工业机器人用支撑底座.pdf
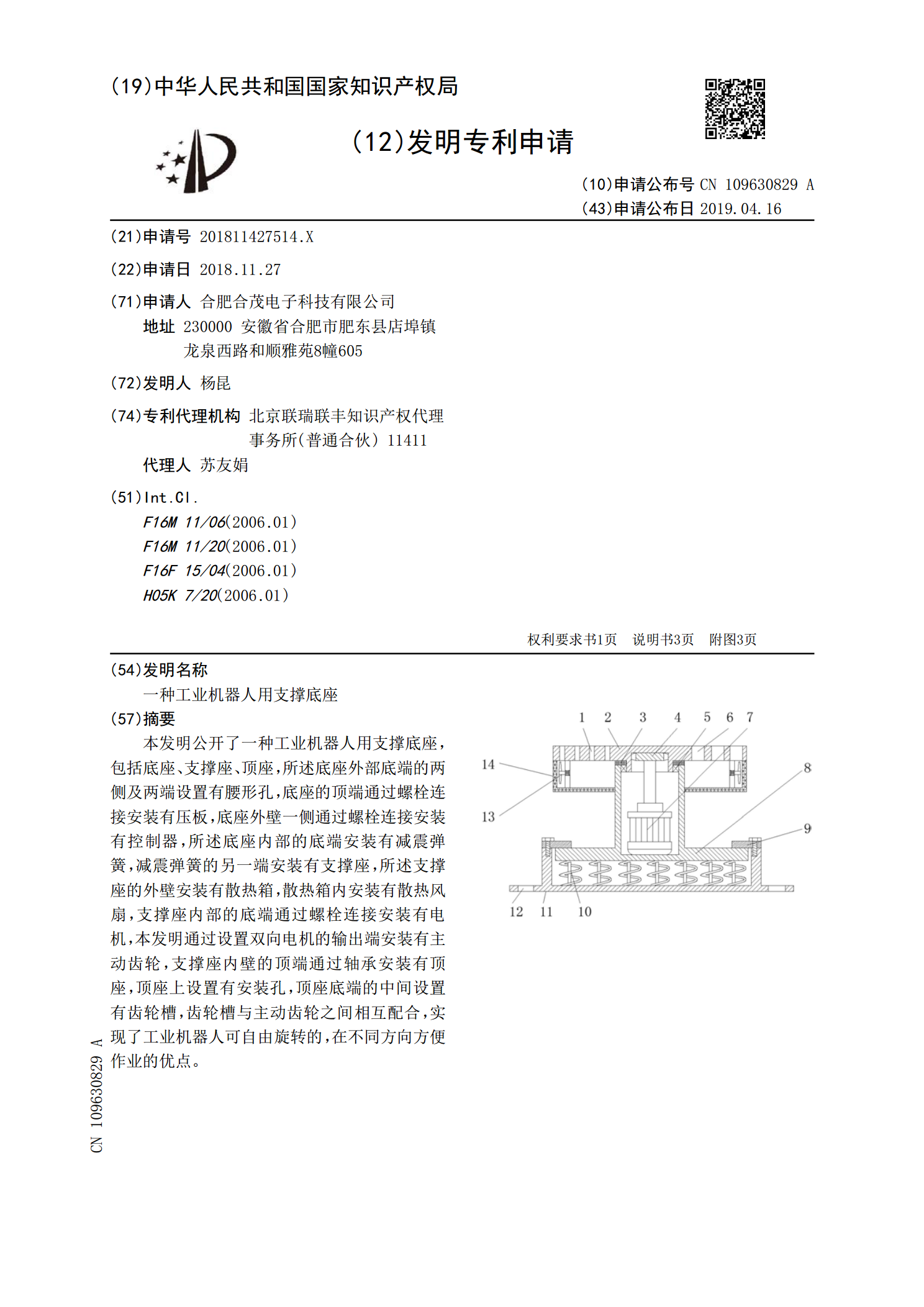
本发明公开了一种工业机器人用支撑底座,包括底座、支撑座、顶座,所述底座外部底端的两侧及两端设置有腰形孔,底座的顶端通过螺栓连接安装有压板,底座外壁一侧通过螺栓连接安装有控制器,所述底座内部的底端安装有减震弹簧,减震弹簧的另一端安装有支撑座,所述支撑座的外壁安装有散热箱,散热箱内安装有散热风扇,支撑座内部的底端通过螺栓连接安装有电机,本发明通过设置双向电机的输出端安装有主动齿轮,支撑座内壁的顶端通过轴承安装有顶座,顶座上设置有安装孔,顶座底端的中间设置有齿轮槽,齿轮槽与主动齿轮之间相互配合,实现了工业机器人

一种智能交互机器人提醒休息的方法及智能交互机器人.pdf
发明实施例提供一种智能交互机器人提醒休息的方法及智能交互机器人,该方法包括:针对智能交互机器人的每个应用预先设定对应的休息条件和休息模式;存储每个应用及其对应的休息条件和休息模式;交互对象使用智能交互机器人的应用;当应用对应的休息条件满足时,智能交互机器人启动对应的休息模式,采用了该实施例,解决现有的智能交互机器人无法提醒交互对象休息的问题。
一种智能机器人的底座组件.pdf
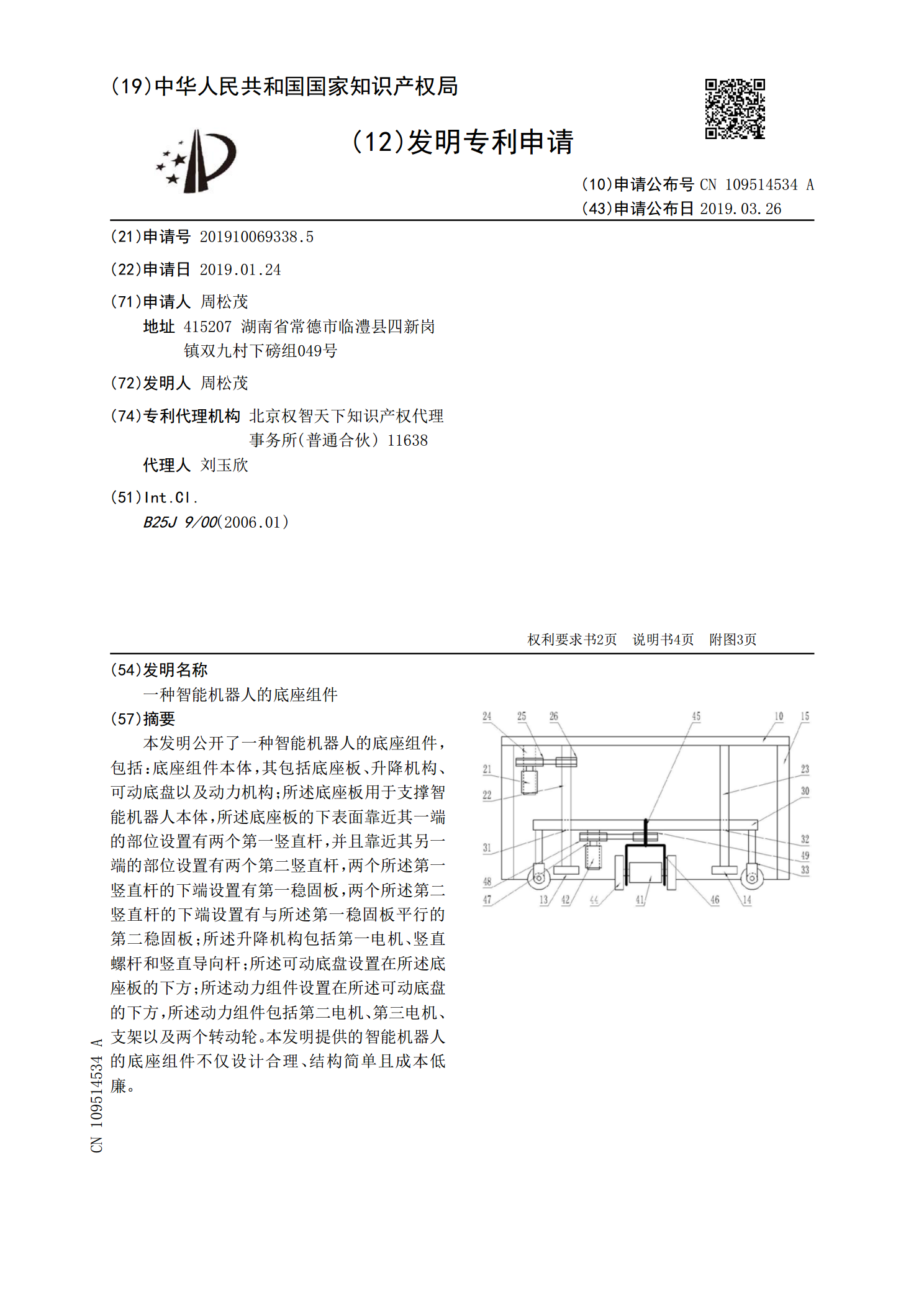
本发明公开了一种智能机器人的底座组件,包括:底座组件本体,其包括底座板、升降机构、可动底盘以及动力机构;所述底座板用于支撑智能机器人本体,所述底座板的下表面靠近其一端的部位设置有两个第一竖直杆,并且靠近其另一端的部位设置有两个第二竖直杆,两个所述第一竖直杆的下端设置有第一稳固板,两个所述第二竖直杆的下端设置有与所述第一稳固板平行的第二稳固板;所述升降机构包括第一电机、竖直螺杆和竖直导向杆;所述可动底盘设置在所述底座板的下方;所述动力组件设置在所述可动底盘的下方,所述动力组件包括第二电机、第三电机、支架以及
一种智能机器人及智能交互方法.pdf
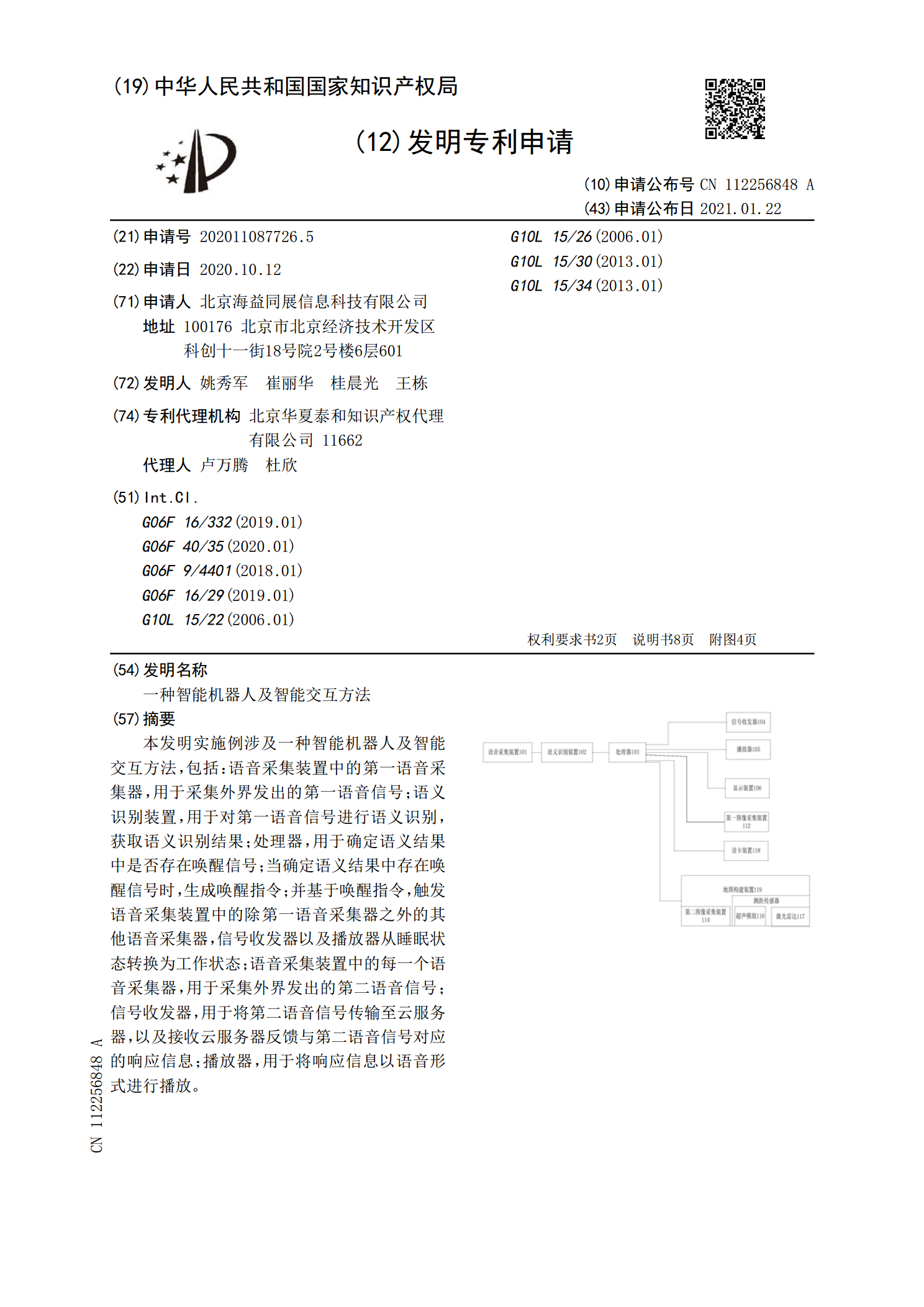
本发明实施例涉及一种智能机器人及智能交互方法,包括:语音采集装置中的第一语音采集器,用于采集外界发出的第一语音信号;语义识别装置,用于对第一语音信号进行语义识别,获取语义识别结果;处理器,用于确定语义结果中是否存在唤醒信号;当确定语义结果中存在唤醒信号时,生成唤醒指令;并基于唤醒指令,触发语音采集装置中的除第一语音采集器之外的其他语音采集器,信号收发器以及播放器从睡眠状态转换为工作状态;语音采集装置中的每一个语音采集器,用于采集外界发出的第二语音信号;信号收发器,用于将第二语音信号传输至云服务器,以及接收