
红外图像配准实现方法及其装置.pdf

新月****姐a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

红外图像配准实现方法及其装置.pdf
本发明公开了一种红外图像配准实现方法及其装置,本发明装置包括数据传输模块、相位相关位移计算模块、重叠区域计算模块、Harris角点检测模块和匹配模块;其中,数据传输模块与相位相关位移计算模块连接,数据传输模块和相位相关位移计算模块都与重叠区域计算模块连接,重叠区域计算模块与Harris角点检测模块连接,重叠区域计算模块和Harris角点检测模块都与匹配模块连接,匹配模块与数据传输模块连接;本发明将相位相关法与Harris角点检测法相结合,并且使用带有RocketIO模块的FPGA高速传输图像数据,使得能在
图像配准方法和图像配准装置.pdf
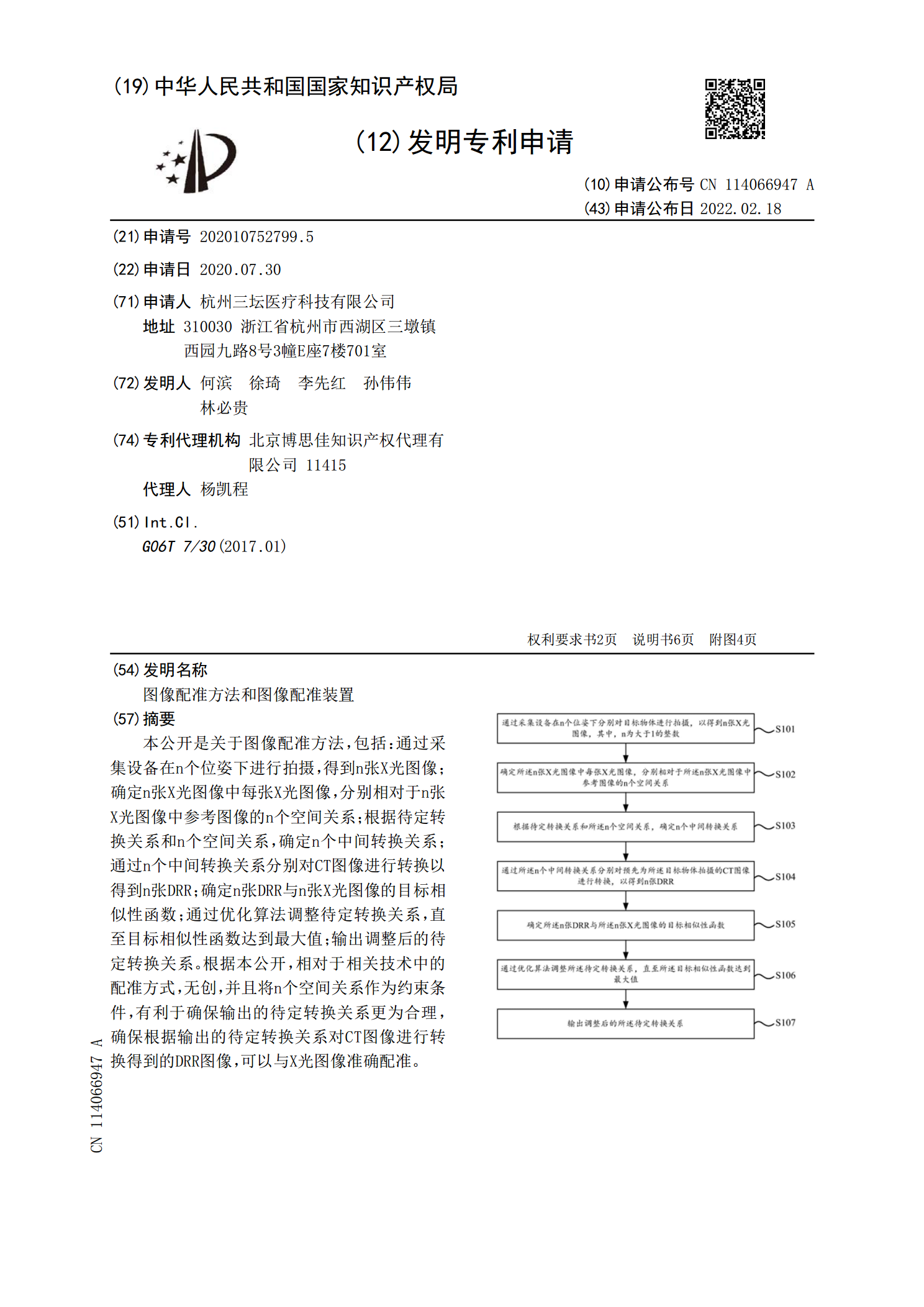
本公开是关于图像配准方法,包括:通过采集设备在n个位姿下进行拍摄,得到n张X光图像;确定n张X光图像中每张X光图像,分别相对于n张X光图像中参考图像的n个空间关系;根据待定转换关系和n个空间关系,确定n个中间转换关系;通过n个中间转换关系分别对CT图像进行转换以得到n张DRR;确定n张DRR与n张X光图像的目标相似性函数;通过优化算法调整待定转换关系,直至目标相似性函数达到最大值;输出调整后的待定转换关系。根据本公开,相对于相关技术中的配准方式,无创,并且将n个空间关系作为约束条件,有利于确保输出的待定转

图像配准方法及装置.pdf
本发明提供一种图像配准方法及装置。本发明的图像配准处理方法,包括:根据第一配准方法计算待配准图像相对于原图像的初次配准结果;根据所述初次配准结果、预设的配准需求参数和第二配准方法计算所述待配准图像相对于所述原图像的最终配准结果。采用本发明的技术方案,可以弥补现有技术中仅对待配准图像进行一次配准处理,例如仅对待配准图像相对于原图像进行一次基于互功率谱的图像配准处理,使得配准处理的精确度较低的缺陷,可以在配准处理中,使用不同的配准方法对待配准图像进行处理,提高配准的精度和效率,便于后续根据配准的结果,对图像进
一种可见光图像和红外图像配准方法及装置.pdf
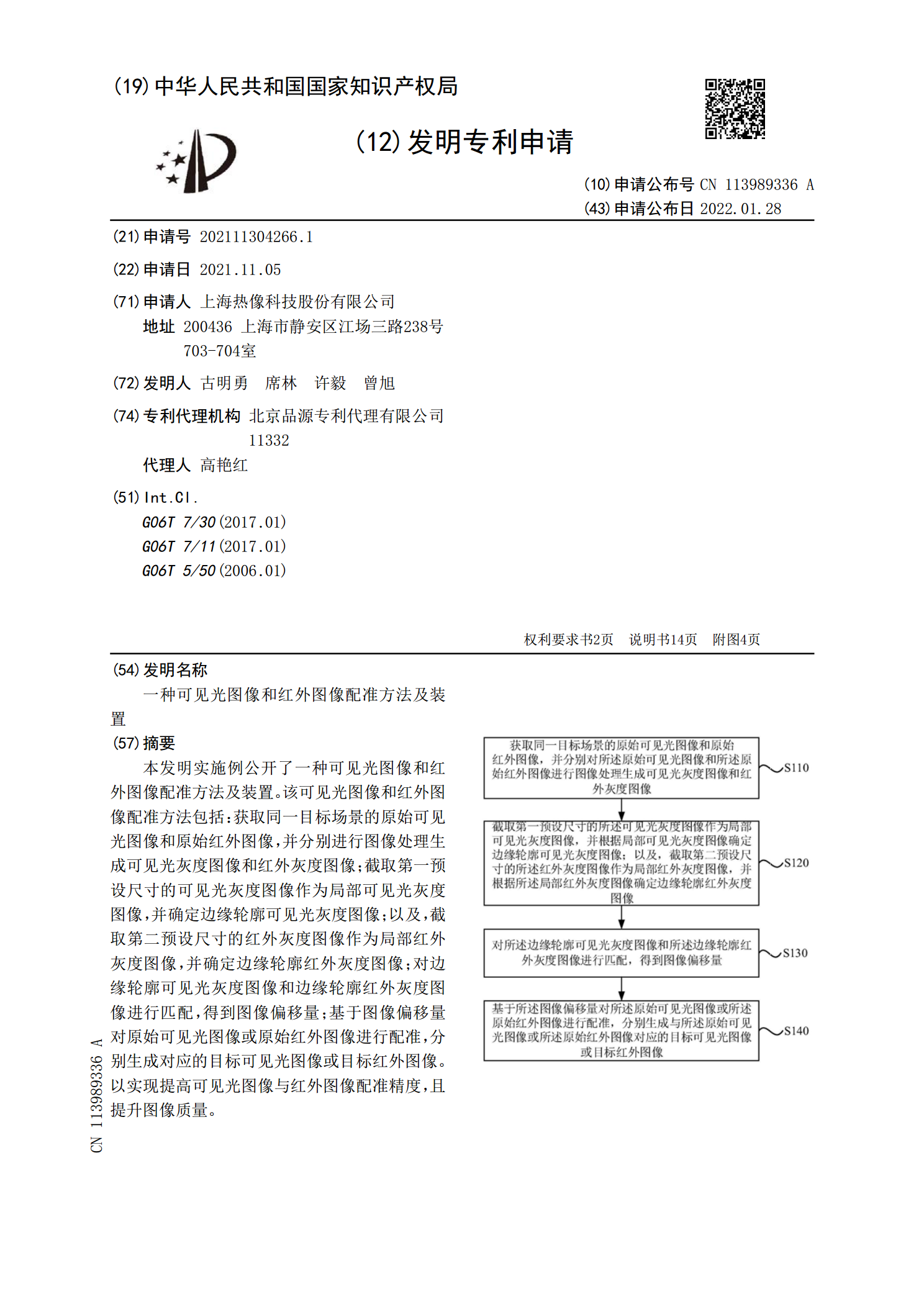
本发明实施例公开了一种可见光图像和红外图像配准方法及装置。该可见光图像和红外图像配准方法包括:获取同一目标场景的原始可见光图像和原始红外图像,并分别进行图像处理生成可见光灰度图像和红外灰度图像;截取第一预设尺寸的可见光灰度图像作为局部可见光灰度图像,并确定边缘轮廓可见光灰度图像;以及,截取第二预设尺寸的红外灰度图像作为局部红外灰度图像,并确定边缘轮廓红外灰度图像;对边缘轮廓可见光灰度图像和边缘轮廓红外灰度图像进行匹配,得到图像偏移量;基于图像偏移量对原始可见光图像或原始红外图像进行配准,分别生成对应的目标
基于图像的配准方法和装置.pdf
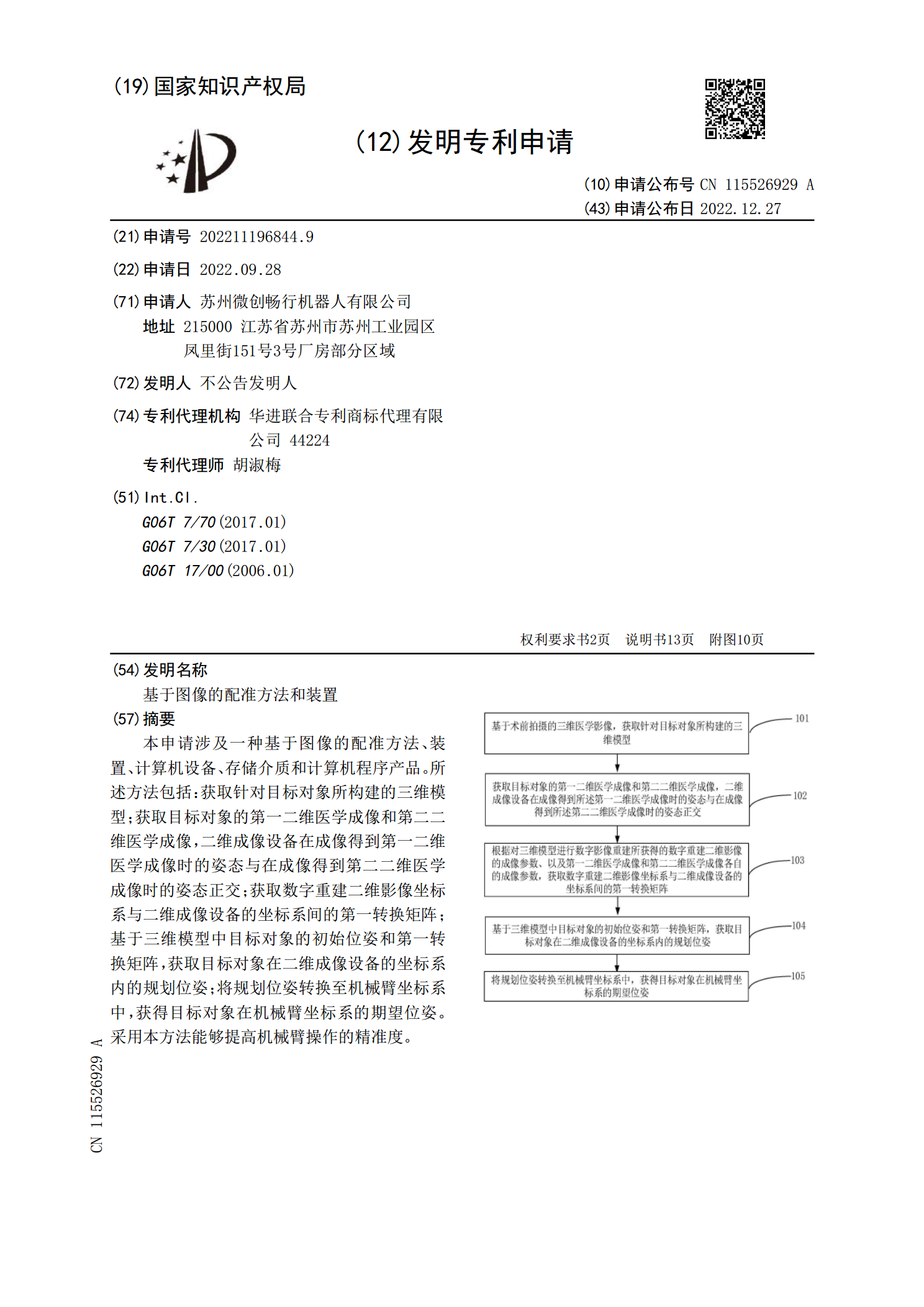
本申请涉及一种基于图像的配准方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:获取针对目标对象所构建的三维模型;获取目标对象的第一二维医学成像和第二二维医学成像,二维成像设备在成像得到第一二维医学成像时的姿态与在成像得到第二二维医学成像时的姿态正交;获取数字重建二维影像坐标系与二维成像设备的坐标系间的第一转换矩阵;基于三维模型中目标对象的初始位姿和第一转换矩阵,获取目标对象在二维成像设备的坐标系内的规划位姿;将规划位姿转换至机械臂坐标系中,获得目标对象在机械臂坐标系的期望位姿。采用本方法能够