
一种遗留物检测和跟踪方法.pdf

猫巷****晓容


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种遗留物检测和跟踪方法.pdf
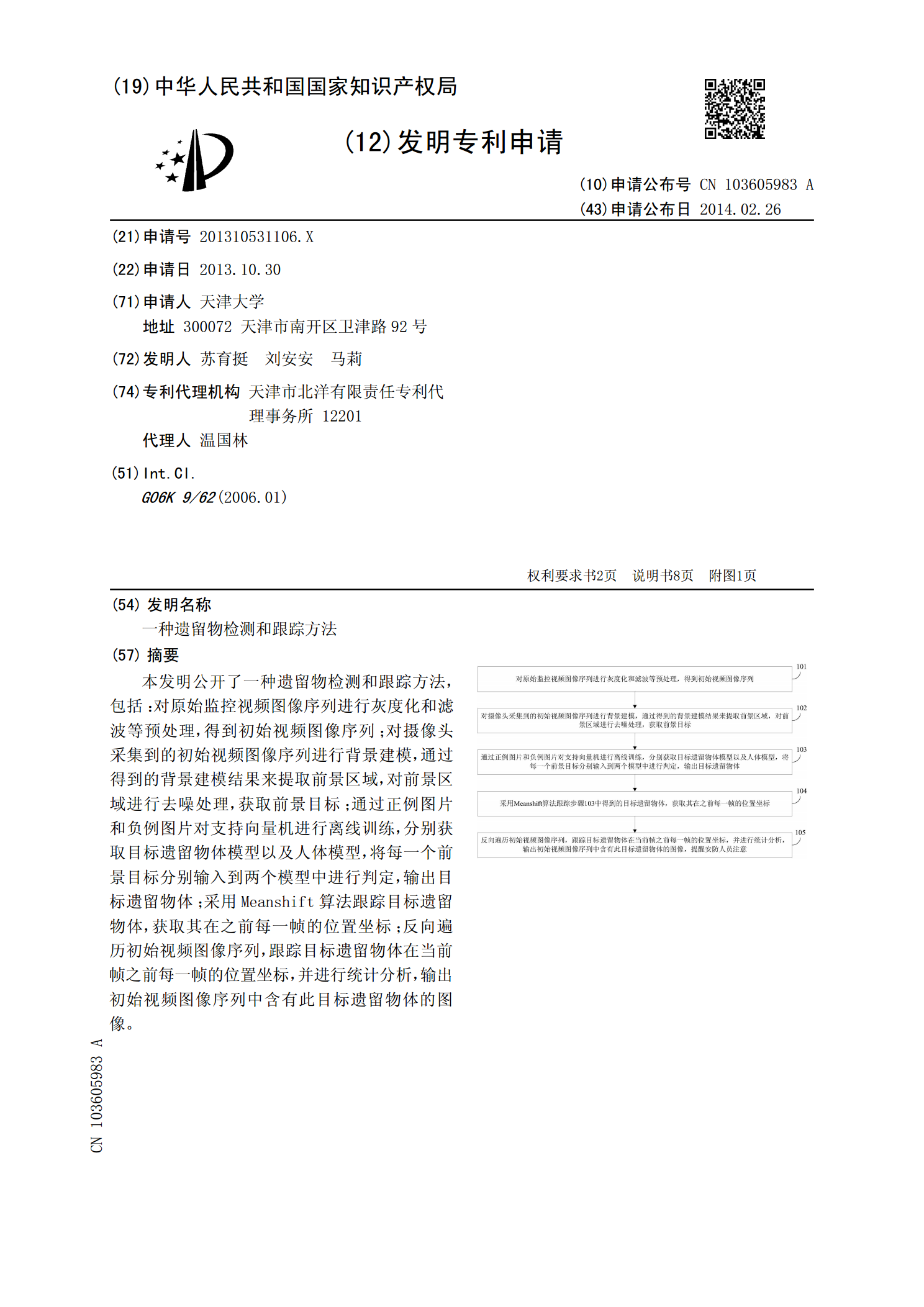
本发明公开了一种遗留物检测和跟踪方法,包括:对原始监控视频图像序列进行灰度化和滤波等预处理,得到初始视频图像序列;对摄像头采集到的初始视频图像序列进行背景建模,通过得到的背景建模结果来提取前景区域,对前景区域进行去噪处理,获取前景目标;通过正例图片和负例图片对支持向量机进行离线训练,分别获取目标遗留物体模型以及人体模型,将每一个前景目标分别输入到两个模型中进行判定,输出目标遗留物体;采用Meanshift算法跟踪目标遗留物体,获取其在之前每一帧的位置坐标;反向遍历初始视频图像序列,跟踪目标遗留物体在当前帧

遗留物检测装置及遗留物检测方法.pdf
一种遗留物检测装置,用于检测遗留在被监控区域内的物体,具备:获取部,其从对被监控区域进行拍摄的摄像装置获取区域的图像;处理部,其当从由获取部获取的图像中将一段时间没有移位的物体检测为物体时,启动用于对检测到物体之后的时间进行计数的计时器,并且判定持有过物体的人物与获取部获取的图像中所包含的人物是否一致,如果判定为一致,则停止计时器,如果判定为不一致,则不停止计时器;以及输出部,其根据处理部的结果进行输出,处理部判定计时器是否超过规定时间,当处理部判定计时器已超过规定时间时,输出部输出存在遗留物的信息。
一种遗留物检测方法.pdf
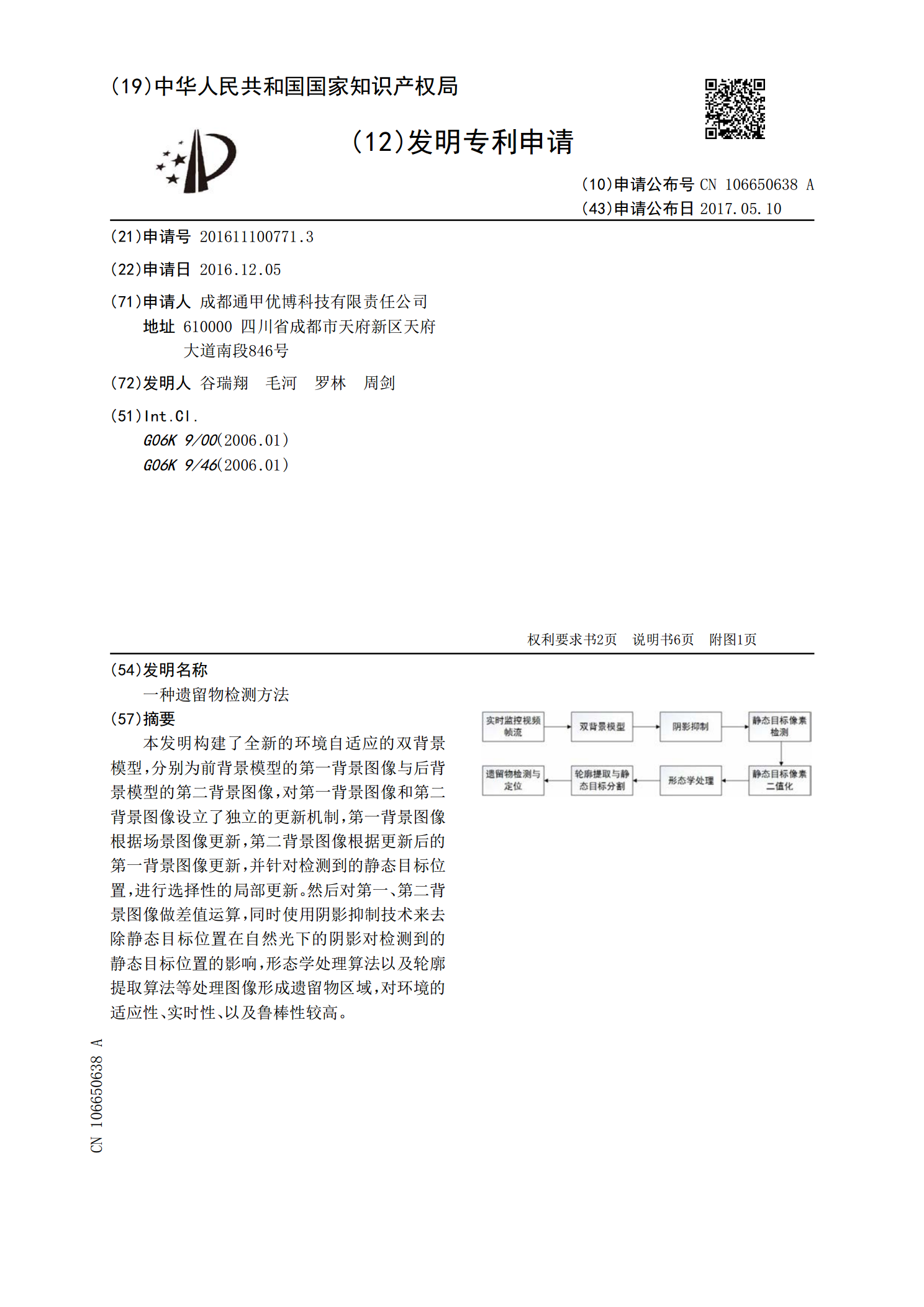
本发明构建了全新的环境自适应的双背景模型,分别为前背景模型的第一背景图像与后背景模型的第二背景图像,对第一背景图像和第二背景图像设立了独立的更新机制,第一背景图像根据场景图像更新,第二背景图像根据更新后的第一背景图像更新,并针对检测到的静态目标位置,进行选择性的局部更新。然后对第一、第二背景图像做差值运算,同时使用阴影抑制技术来去除静态目标位置在自然光下的阴影对检测到的静态目标位置的影响,形态学处理算法以及轮廓提取算法等处理图像形成遗留物区域,对环境的适应性、实时性、以及鲁棒性较高。

实时无跟踪的监控视频遗留物检测方法.pdf
本发明提供一种实时无跟踪的监控视频遗留物检测方法,将手工特征提取和深度学习识别相结合,实现了免跟踪的遗留物检测。首先,在帧差法的基础上,通过统计前景区域在连续帧序列变化情况,从而得到初始的静止目标区域。然后,我们将梯度方向直方向图和色调‑饱和度‑明度两种手工设计特征相结合来进行可疑物预判断,排除光照变化等影响带来伪静止目标区域。最后,结合深度学习技术排除已知物体和行人,从而对可疑物进行最终确认,实现一种无跟踪的遗留物检测。本方法能排除场景中因光照的变化及行人的滞留产生的伪目标,较准确的检测出遗留物体,并且

遗留物检测装置、方法和系统.pdf
本申请提供一种遗留物检测装置、方法和系统,其中,所述装置包括:检测单元,其将获取到的当前帧的每个像素与其背景模型进行匹配,将不匹配的像素作为前景像素在前景掩膜上标记,将每个前景像素对应的前景计数器加1,并更新所述背景模型;标记单元,其对于每个前景像素,在所述前景像素对应的前景计数器的值大于第二阈值时,在遗留掩膜上标记对应所述前景像素的点;掩膜处理单元,其对于遗留掩膜上的每个点,根据其背景模型和缓存背景或前景掩膜对所述遗留掩膜进行处理。本申请增加了遗留物的缓存背景,由此能够判断出遗留物什么时候离开并且停留了