
通信列车后备模式追踪.docx

森林****io


1/6

2/6

3/6

4/6
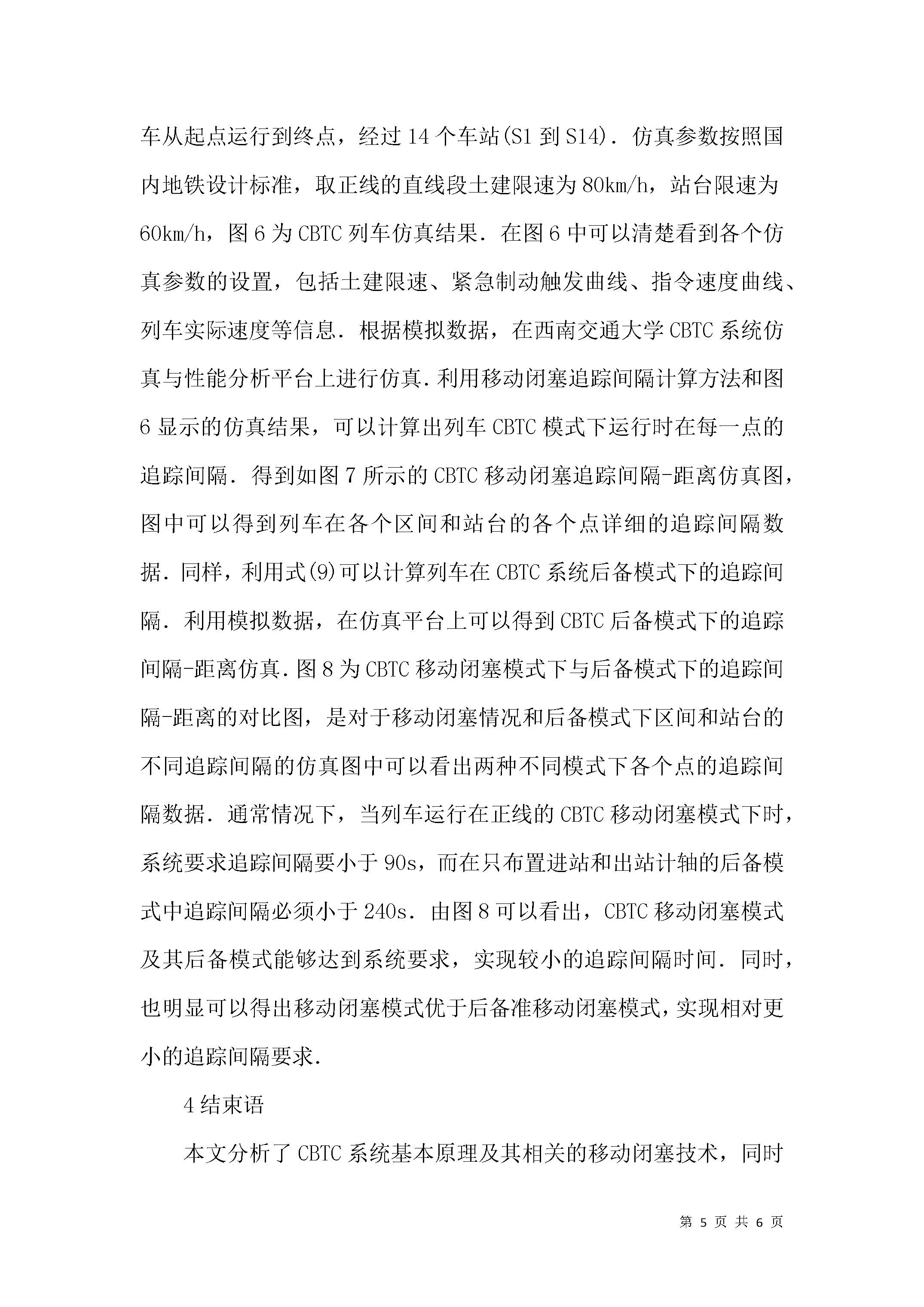
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

通信列车后备模式追踪.docx
通信列车后备模式追踪CBTC(communicationbasedtraincontrol)技术为现代轨道交通的列控技术能实现连续的自动列车控制.对于CBTC系统的原理和相关的关键技术[1-4]国内外已有诸多的研究其相比于传统的基于轨道电路的列控技术来说CBTC系统实现了移动闭塞[5-6]从而达到更优的系统表现.同时也应该看到对于CBTC系统来说虽然具有诸多优点但也不是万能系统.在实际应用中考虑到系统故障或线路开通初期不具备CBTC的运行条件为系统增设了后备模式[7-8]提高
列车追踪预警系统.pdf
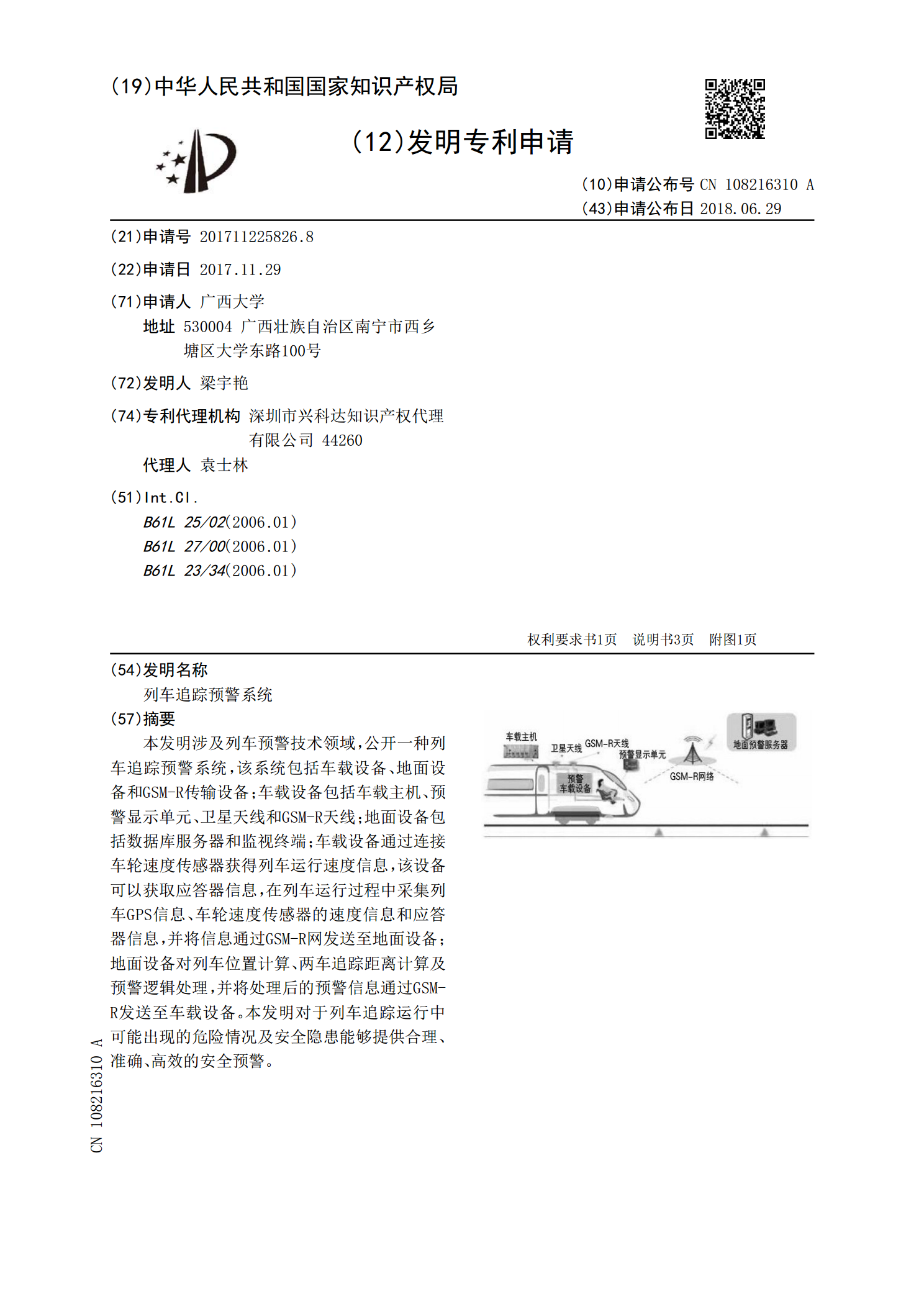
本发明涉及列车预警技术领域,公开一种列车追踪预警系统,该系统包括车载设备、地面设备和GSM‑R传输设备;车载设备包括车载主机、预警显示单元、卫星天线和GSM‑R天线;地面设备包括数据库服务器和监视终端;车载设备通过连接车轮速度传感器获得列车运行速度信息,该设备可以获取应答器信息,在列车运行过程中采集列车GPS信息、车轮速度传感器的速度信息和应答器信息,并将信息通过GSM‑R网发送至地面设备;地面设备对列车位置计算、两车追踪距离计算及预警逻辑处理,并将处理后的预警信息通过GSM‑R发送至车载设备。本发明对于

固定闭塞模式下的列车排序方法及识别号追踪方法.pdf
本发明公开了一种固定闭塞模式下的列车排序方法及列车识别号追踪方法。列车排序方法包括:当列车车头进入某一逻辑区段时,检测逻辑区段是否存在列车队列,若否,则新建列车队列,并将列车的车组号添加到队头,若是,则将列车的车组号添加到队尾;当车头进入下一逻辑区段时,将列车的车组号及其之前的所有车组号从列车队列中删除。列车识别号追踪方法包括:当列车的下一计轴区段被其他识别号占用时,列车识别号停留在当前计轴区段;若下一计轴区段符合步进条件,则判断所述列车是否在所有列车队列的队头,若是,则进行识别号步进。本发明的技术方案能

列车追踪接近预警系统.pdf
本发明提供列车追踪接近预警系统,采用列车定位信息及安全预警逻辑,利用多种信息无线传输模式的优势,对同线路、同方向运行列车的安全状态进行实时高效的计算评估,从而对列车追踪运行中可能出现的危险情况以及信号系统失效导致的安全隐患提供合理、准确、高效的安全预警。该系统利用差分卫星导航定位接收机结合车轮速度传感器实现列车定位,采用车地间无线通信网络进行列车位置信息传输,列车位置信息包括列车运行公里标、速度、方向、线路号、时间戳等,地面列车位置控制器对获得的辖区内各列车位置信息进行综合检测与处理,进行位置判定逻辑计算

如何制作考核保险追踪战报及追踪模式探索44页.pptx
开篇说明人力的整体发展状况(三)目标人力和实际人力目标的差值分析主管已增员、未增员、增员有效等情况主管晋升情况新人举绩率分析Q值各区间人数分布合同终止人员分析就关键落后指标提出相关建议下挖“当前人力清单”五级架构人力报表(325)个险渠道人力(含收展)完成进度报表(331)业务员系列人员晋升组经理追踪表(340)组经理人员晋升分处经理追踪表(341)支公司培育组经理1人的组经理名单主管增员考核追踪报表(370)考核追