
基于压簧的线性串联弹性驱动器.pdf

飞飙****ng


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于压簧的线性串联弹性驱动器.pdf
本发明为一种基于压簧的线性弹性驱动器,包括编码器、伺服电机、驱动器底座、联轴器、轴承、轴承滚动底盘、压簧、铜柱、压簧固定顶板和底板、输出轴和负载连接单元,编码器与驱动输出轴相连测量负载端转动的角度,伺服电机的法兰盘与轴承滚动底盘相连,轴承滚动底盘上加工线性轨道,使得驱动器输出力矩和电机与负载间相对转角呈线性关系。压簧固定底板上开有间隔120°的三个螺纹孔,每个螺纹孔处分别安装铜柱,并将压簧套装在铜柱上,负载连接单元留置负载安装孔。本发明是一种新型的高能量密度、线性化的弹性驱动器,为设计一种具有本质安全特性

基于串联弹性驱动器的并联柔顺手腕的设计.docx
基于串联弹性驱动器的并联柔顺手腕的设计基于串联弹性驱动器的并联柔顺手腕的设计摘要:随着机器人技术的快速发展,柔性手腕在机器人应用中的重要性越来越被重视。串联弹性驱动器作为一种新兴的驱动器技术,具有较高的柔韧性和高效率的特点。本论文将基于串联弹性驱动器的设计思路,研究并实现一种具有柔顺特性的并联柔顺手腕。1.引言机器人手腕的柔性和精准度对于其应用场景的拓展具有重要的意义。传统的电机驱动手腕由于其结构的刚性和传动机构的局限性,无法满足对于细小物体的操作需求。而并联柔顺手腕通过串联弹性驱动器的设计,能够实现柔韧
一种给定非线性刚度的串联弹性驱动器设计方法.pdf
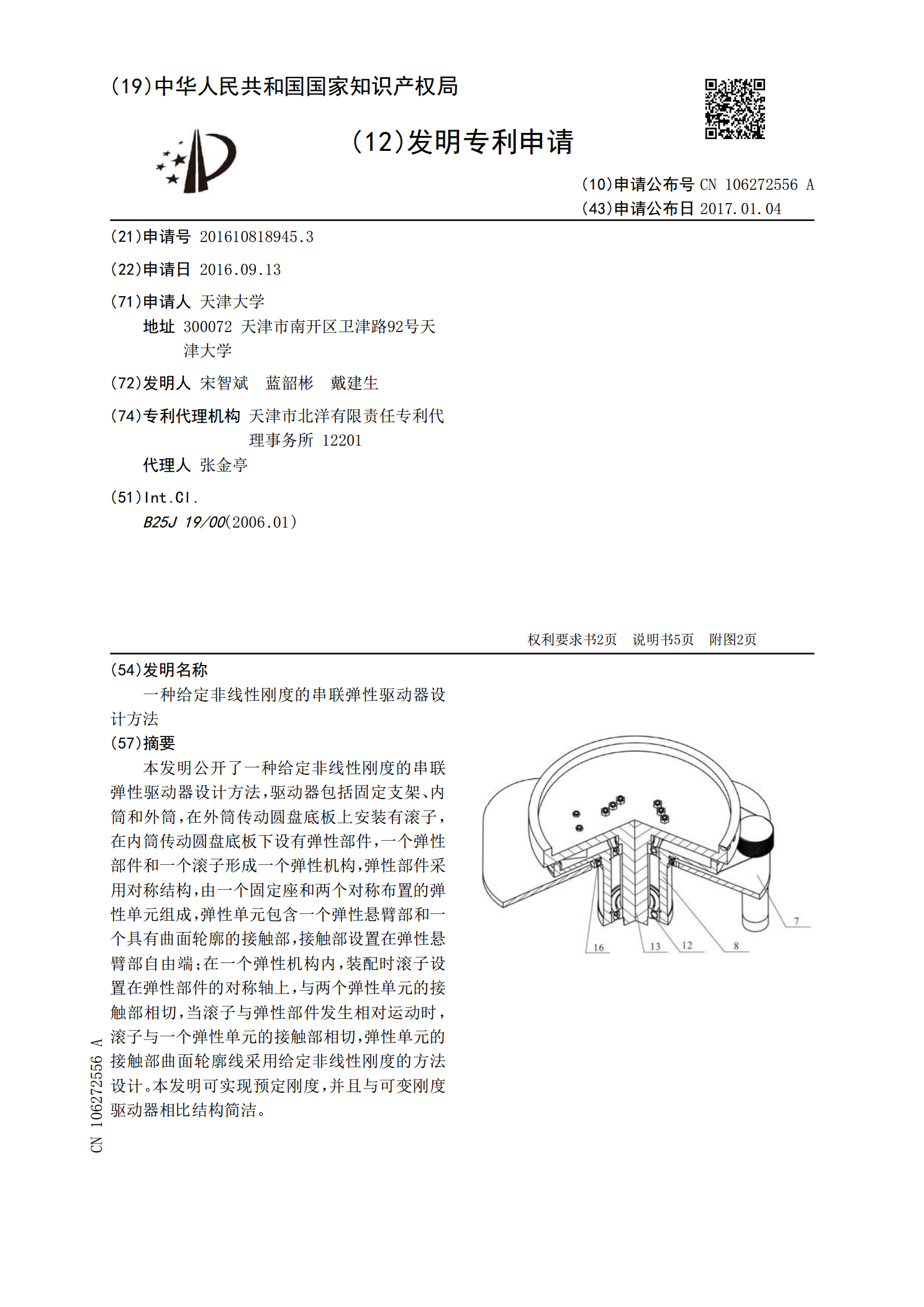
本发明公开了一种给定非线性刚度的串联弹性驱动器设计方法,驱动器包括固定支架、内筒和外筒,在外筒传动圆盘底板上安装有滚子,在内筒传动圆盘底板下设有弹性部件,一个弹性部件和一个滚子形成一个弹性机构,弹性部件采用对称结构,由一个固定座和两个对称布置的弹性单元组成,弹性单元包含一个弹性悬臂部和一个具有曲面轮廓的接触部,接触部设置在弹性悬臂部自由端;在一个弹性机构内,装配时滚子设置在弹性部件的对称轴上,与两个弹性单元的接触部相切,当滚子与弹性部件发生相对运动时,滚子与一个弹性单元的接触部相切,弹性单元的接触部曲面轮
一种串联弹性驱动器.pdf
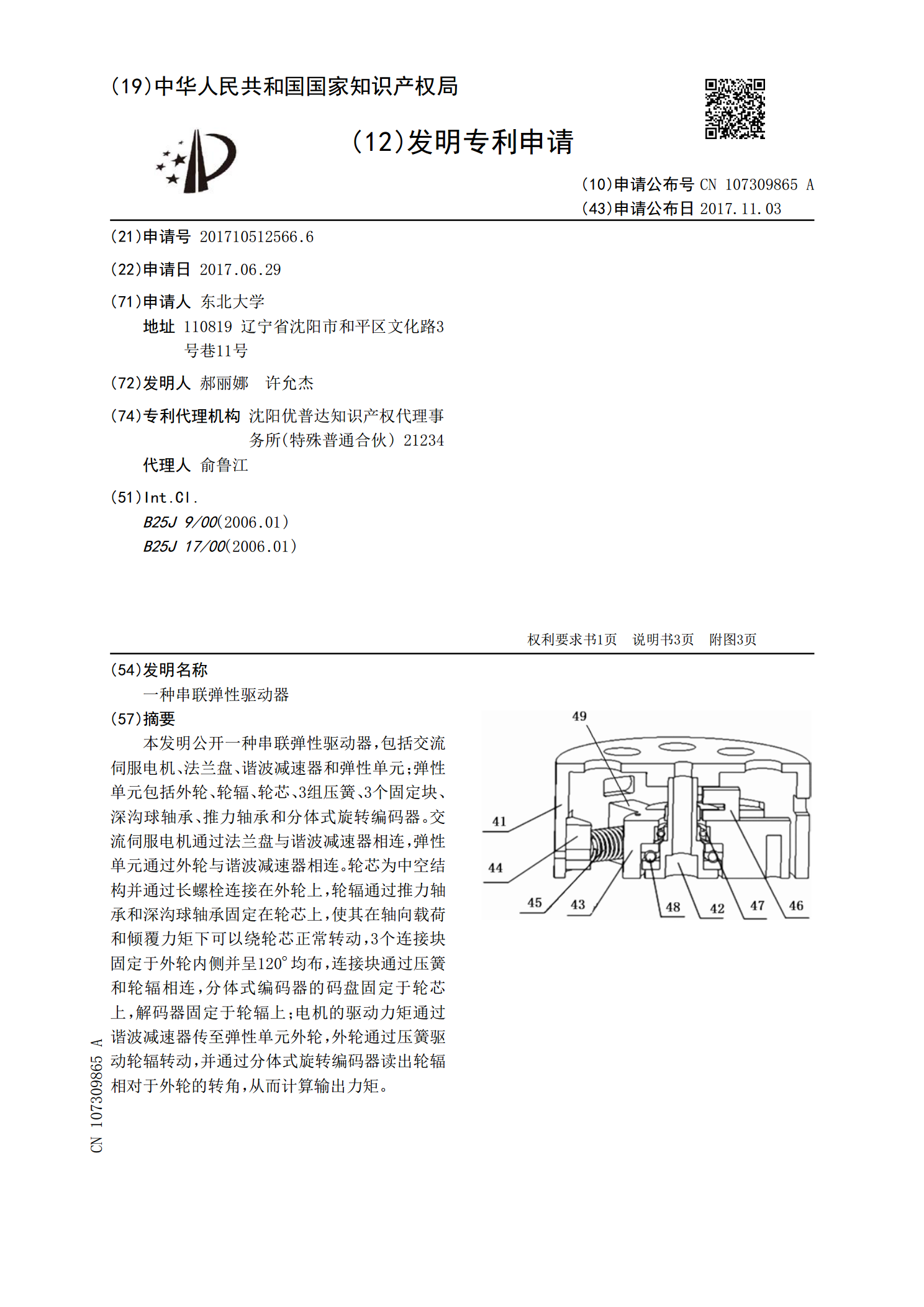
本发明公开一种串联弹性驱动器,包括交流伺服电机、法兰盘、谐波减速器和弹性单元;弹性单元包括外轮、轮辐、轮芯、3组压簧、3个固定块、深沟球轴承、推力轴承和分体式旋转编码器。交流伺服电机通过法兰盘与谐波减速器相连,弹性单元通过外轮与谐波减速器相连。轮芯为中空结构并通过长螺栓连接在外轮上,轮辐通过推力轴承和深沟球轴承固定在轮芯上,使其在轴向载荷和倾覆力矩下可以绕轮芯正常转动,3个连接块固定于外轮内侧并呈120°均布,连接块通过压簧和轮辐相连,分体式编码器的码盘固定于轮芯上,解码器固定于轮辐上;电机的驱动力矩通过

一种基于串联弹性驱动器的柔顺机械臂设计.docx
一种基于串联弹性驱动器的柔顺机械臂设计绪论柔顺机器人是指机器人系统中有一定程度的柔性结构,与刚性的支撑结构相比,其柔性可使得机器人系统在接触场景中表现得更加优良。多数的柔性机器人是基于传统的倒立摆(invertedpendulum)理论而设计而成的,通常由弹性杆、挠曲杆或气动漂移控制器构成。然而,这些通常的结构会限制机器人的精度和速度,因为它们只能围绕关节轴进行变形,并且没有简单的方法来控制其柔性,因此限制了它们的灵活性。为了解决这些问题,近年来提出了基于串联弹性驱动器的柔顺机械臂,其通过支撑关节的弹性链