
一种基于串联弹性驱动器的柔顺机械臂设计.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于串联弹性驱动器的柔顺机械臂设计.docx
一种基于串联弹性驱动器的柔顺机械臂设计绪论柔顺机器人是指机器人系统中有一定程度的柔性结构,与刚性的支撑结构相比,其柔性可使得机器人系统在接触场景中表现得更加优良。多数的柔性机器人是基于传统的倒立摆(invertedpendulum)理论而设计而成的,通常由弹性杆、挠曲杆或气动漂移控制器构成。然而,这些通常的结构会限制机器人的精度和速度,因为它们只能围绕关节轴进行变形,并且没有简单的方法来控制其柔性,因此限制了它们的灵活性。为了解决这些问题,近年来提出了基于串联弹性驱动器的柔顺机械臂,其通过支撑关节的弹性链

基于串联弹性驱动器的并联柔顺手腕的设计.docx
基于串联弹性驱动器的并联柔顺手腕的设计基于串联弹性驱动器的并联柔顺手腕的设计摘要:随着机器人技术的快速发展,柔性手腕在机器人应用中的重要性越来越被重视。串联弹性驱动器作为一种新兴的驱动器技术,具有较高的柔韧性和高效率的特点。本论文将基于串联弹性驱动器的设计思路,研究并实现一种具有柔顺特性的并联柔顺手腕。1.引言机器人手腕的柔性和精准度对于其应用场景的拓展具有重要的意义。传统的电机驱动手腕由于其结构的刚性和传动机构的局限性,无法满足对于细小物体的操作需求。而并联柔顺手腕通过串联弹性驱动器的设计,能够实现柔韧

基于串联弹性驱动器的并联柔顺手腕的设计的开题报告.docx
基于串联弹性驱动器的并联柔顺手腕的设计的开题报告一、研究背景在现代工业生产领域中,机器人已成为一种重要的生产工具。随着机器人技术的不断发展,机器人的舒适性和柔韧性也越来越受到重视。尤其是在柔性组装、物料搬运等领域,机器人的柔顺性尤为重要。而在机器人柔顺性的实现中,手腕部分是至关重要的。传统的机器人手腕虽然可以实现一定程度的柔顺性,但是其灵活性和负载能力都有限。而基于串联弹性驱动器的并联柔顺手腕则可以大大提高机器人手腕的柔韧性和负载能力,从而满足现代工业生产的需要。二、研究目的本研究旨在设计并实现一种基于串

柔顺串联弹性驱动器的设计与控制方法研究的开题报告.docx
柔顺串联弹性驱动器的设计与控制方法研究的开题报告一、选题背景及意义随着科技的不断进步,机器人应用越来越广泛。机器人的关节驱动方式多种多样,电机驱动已经成为机器人关节驱动的主流方式。然而,常规的电机驱动方式具有响应速度慢、力矩稳定性差等问题。为了解决上述问题,柔顺串联弹性驱动器被提出。它采用传动装置、柔顺机构以及柔性驱动装置等组成,能够提供高响应速度和较大的力矩稳定性。因此,柔顺串联弹性驱动器在机器人关节驱动中具有广泛的应用价值。本研究将围绕柔顺串联弹性驱动器的设计和控制方法展开研究,旨在提升机器人关节驱动
一种串联驱动柔顺机械臂关节.pdf
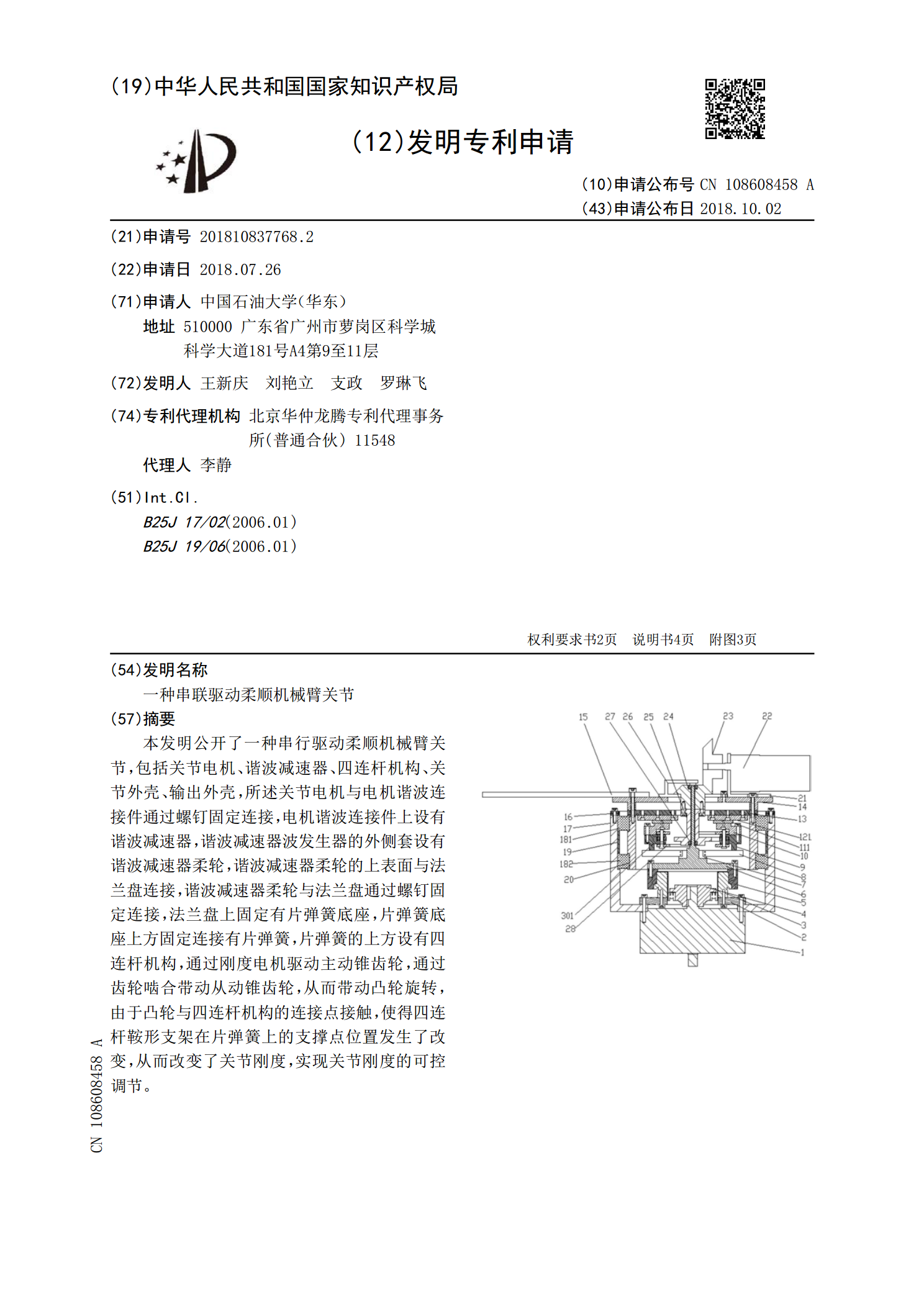
本发明公开了一种串行驱动柔顺机械臂关节,包括关节电机、谐波减速器、四连杆机构、关节外壳、输出外壳,所述关节电机与电机谐波连接件通过螺钉固定连接,电机谐波连接件上设有谐波减速器,谐波减速器波发生器的外侧套设有谐波减速器柔轮,谐波减速器柔轮的上表面与法兰盘连接,谐波减速器柔轮与法兰盘通过螺钉固定连接,法兰盘上固定有片弹簧底座,片弹簧底座上方固定连接有片弹簧,片弹簧的上方设有四连杆机构,通过刚度电机驱动主动锥齿轮,通过齿轮啮合带动从动锥齿轮,从而带动凸轮旋转,由于凸轮与四连杆机构的连接点接触,使得四连杆鞍形支架