
一种给定非线性刚度的串联弹性驱动器设计方法.pdf

是来****文章

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种给定非线性刚度的串联弹性驱动器设计方法.pdf
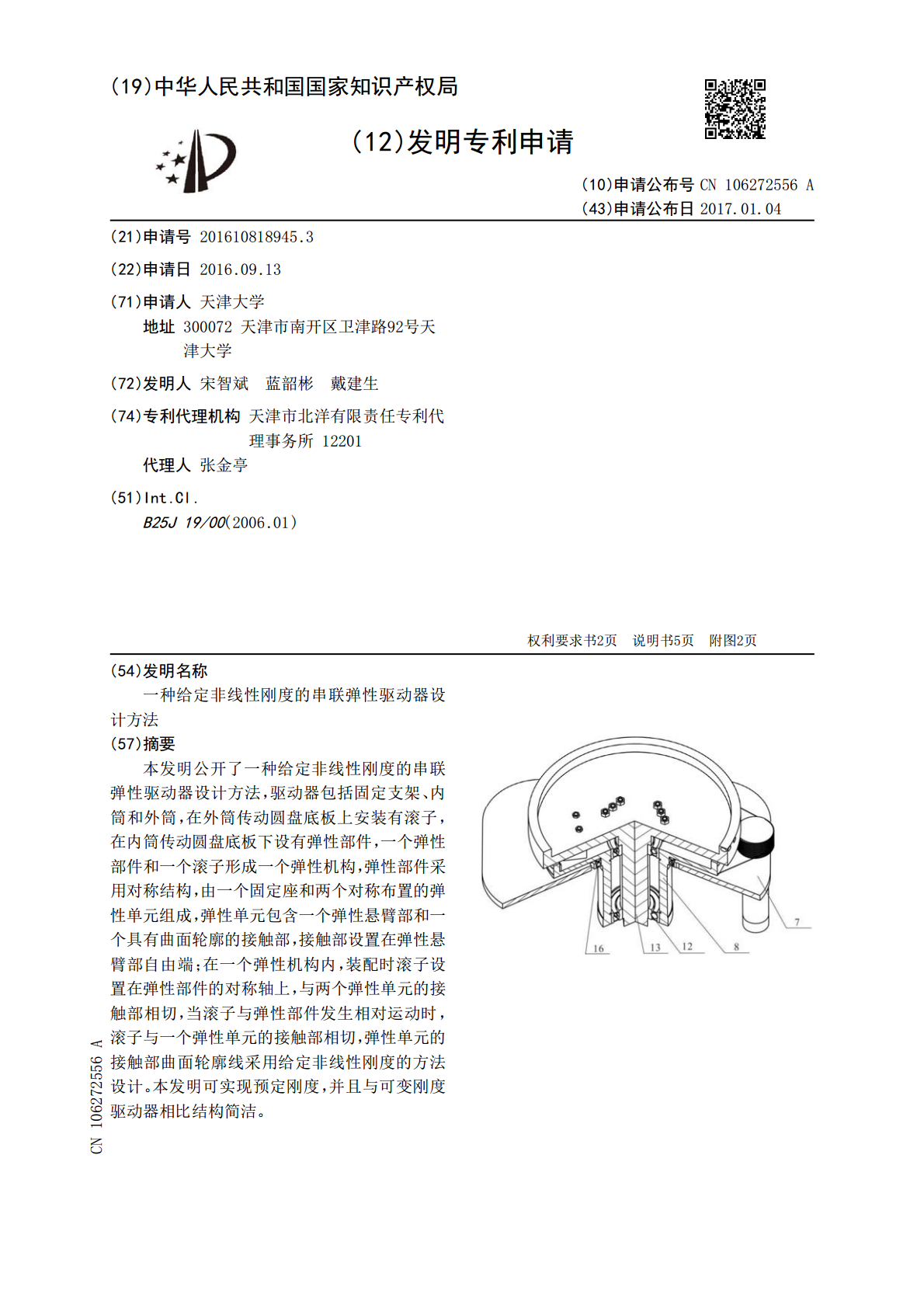
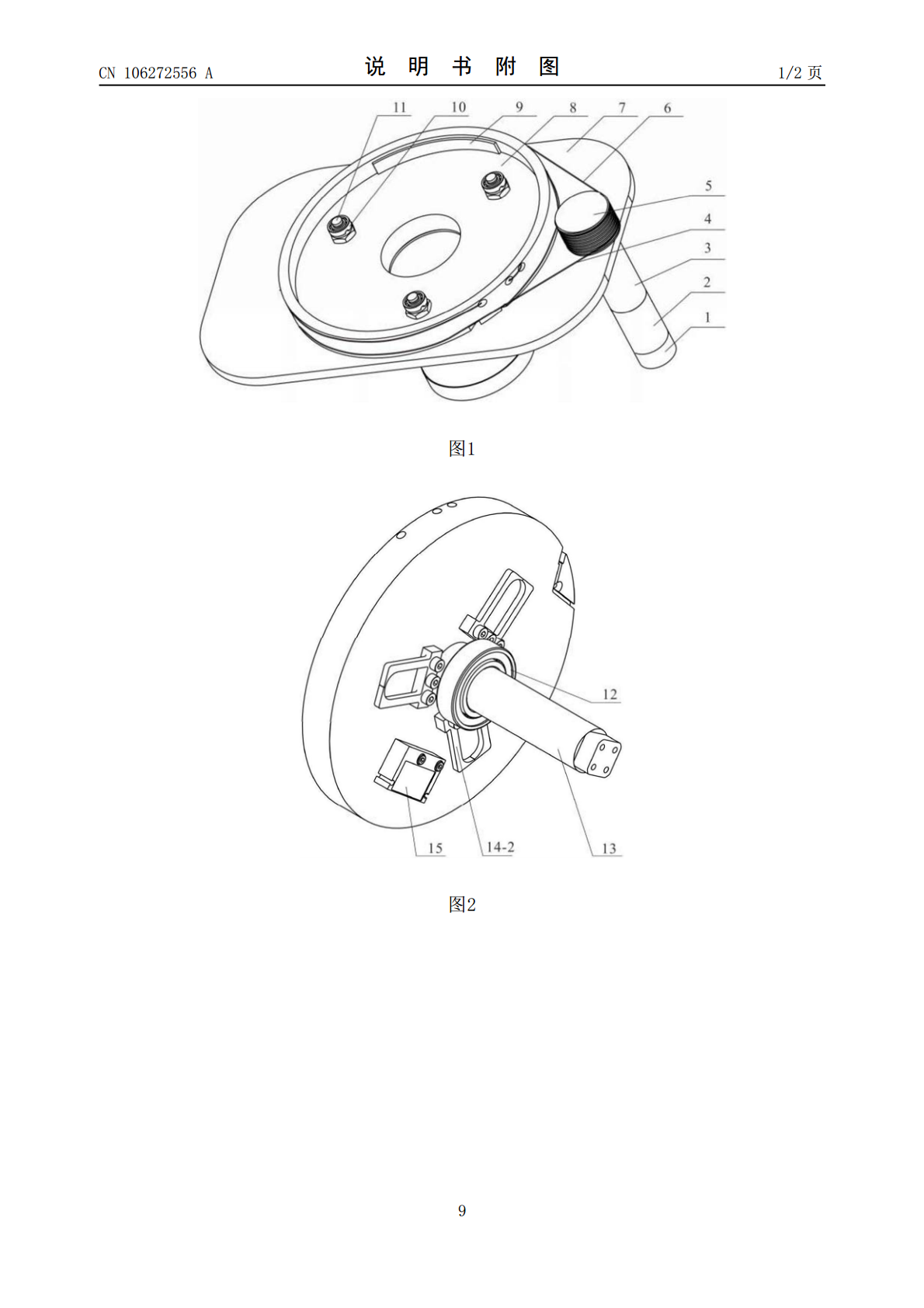
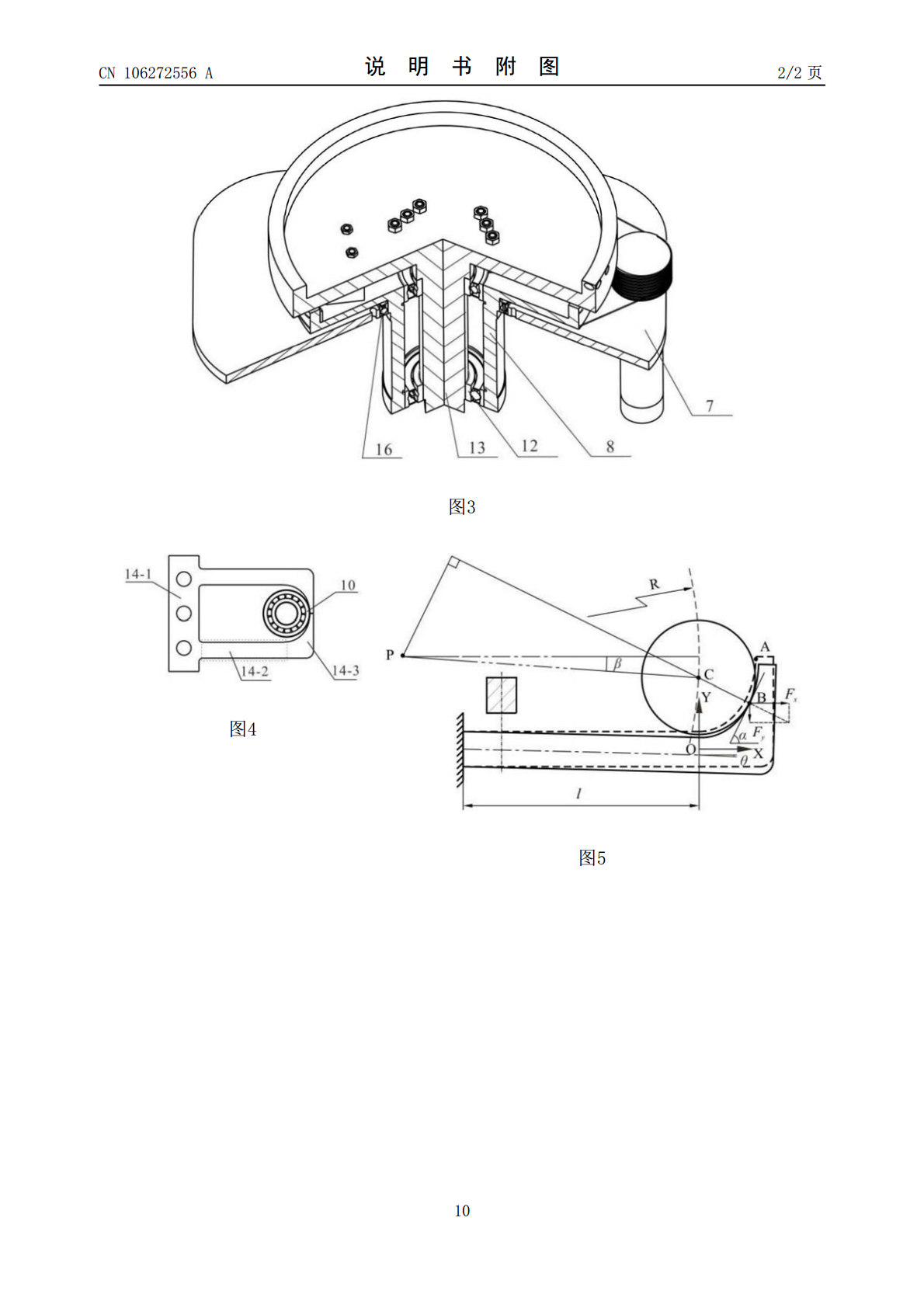
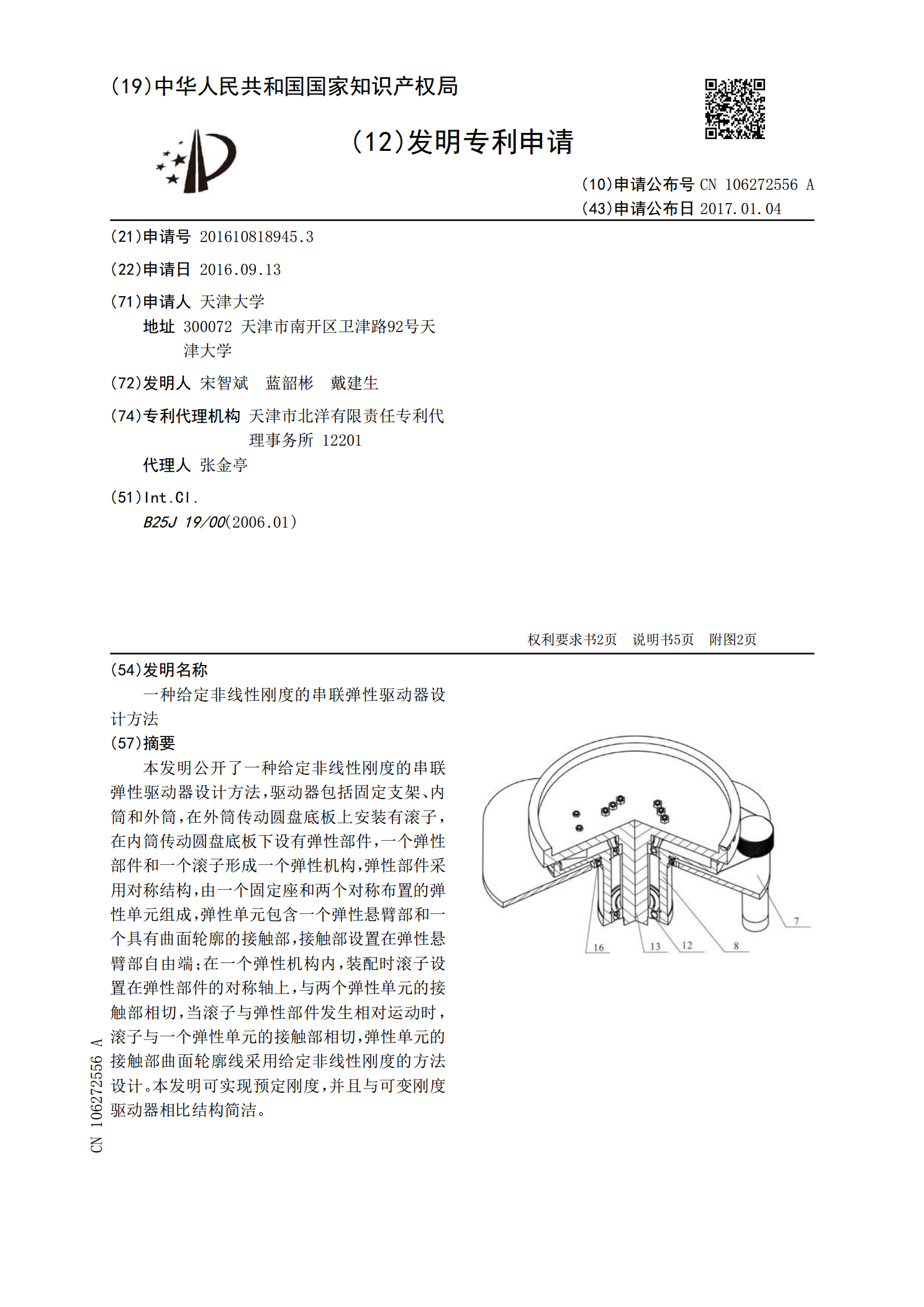
本发明公开了一种给定非线性刚度的串联弹性驱动器设计方法,驱动器包括固定支架、内筒和外筒,在外筒传动圆盘底板上安装有滚子,在内筒传动圆盘底板下设有弹性部件,一个弹性部件和一个滚子形成一个弹性机构,弹性部件采用对称结构,由一个固定座和两个对称布置的弹性单元组成,弹性单元包含一个弹性悬臂部和一个具有曲面轮廓的接触部,接触部设置在弹性悬臂部自由端;在一个弹性机构内,装配时滚子设置在弹性部件的对称轴上,与两个弹性单元的接触部相切,当滚子与弹性部件发生相对运动时,滚子与一个弹性单元的接触部相切,弹性单元的接触部曲面轮

基于给定非线性刚度的柔顺驱动器设计及性能评估.docx
基于给定非线性刚度的柔顺驱动器设计及性能评估一、介绍柔韧驱动器是一种新型的微型力控制器,它使用柔性的材料来实现自适应控制和柔性操纵,增强了机器人的自由度、精度和控制能力。本文将介绍基于给定非线性刚度的柔顺驱动器的设计和性能评估。二、柔顺驱动器结构设计柔顺驱动器通常由传感器、控制器、执行器和机械结构组成。传感器可以检测环境和外部物体的位置、速度和角度等信息,并将信息传输给控制器。控制器基于传感器提供的信息来预测和计算机器人的动态规划和控制信号。执行器接收控制信号并转换为机械运动,实现驱动器的操作。机械结构是
一种串联弹性驱动器.pdf
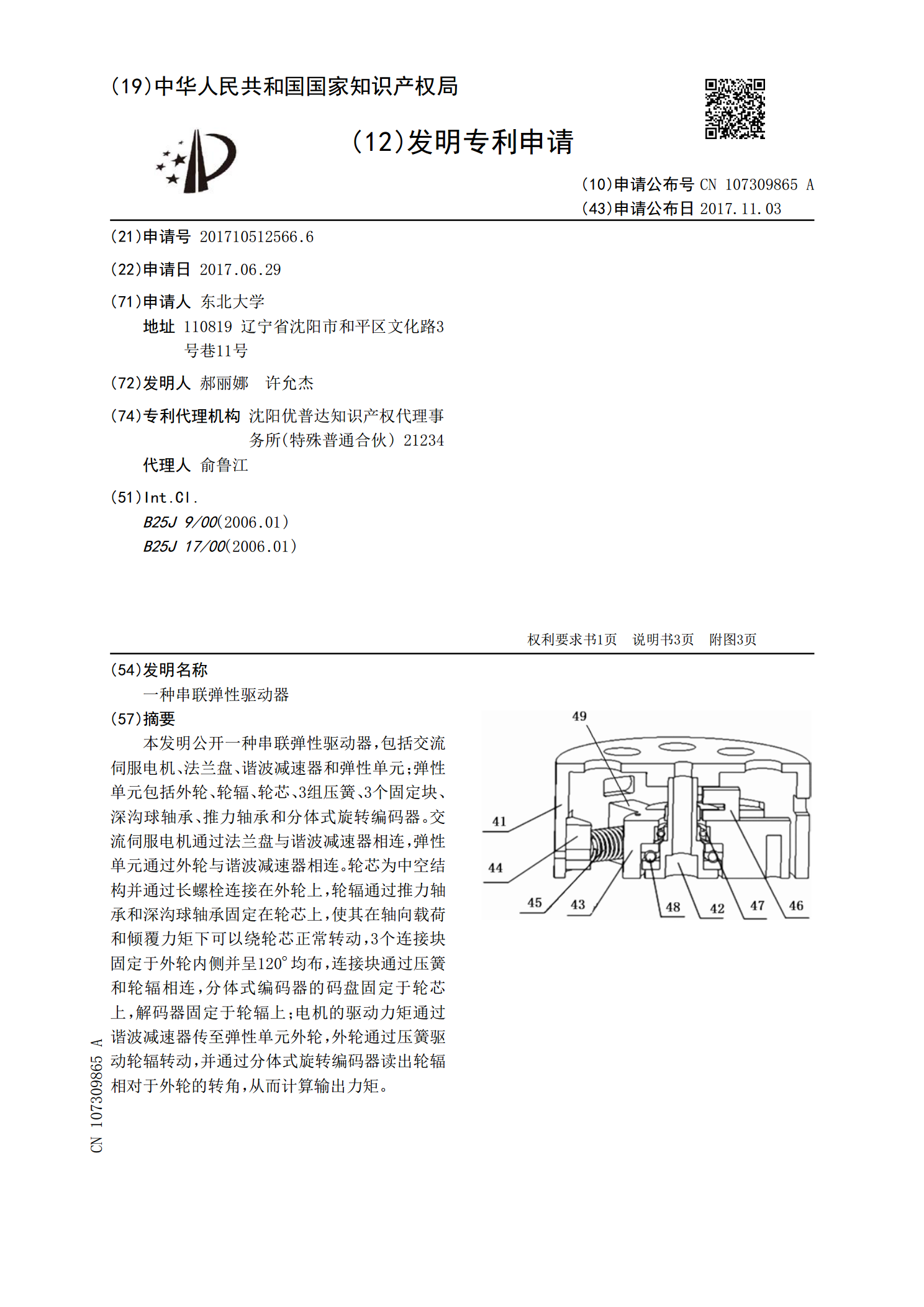
本发明公开一种串联弹性驱动器,包括交流伺服电机、法兰盘、谐波减速器和弹性单元;弹性单元包括外轮、轮辐、轮芯、3组压簧、3个固定块、深沟球轴承、推力轴承和分体式旋转编码器。交流伺服电机通过法兰盘与谐波减速器相连,弹性单元通过外轮与谐波减速器相连。轮芯为中空结构并通过长螺栓连接在外轮上,轮辐通过推力轴承和深沟球轴承固定在轮芯上,使其在轴向载荷和倾覆力矩下可以绕轮芯正常转动,3个连接块固定于外轮内侧并呈120°均布,连接块通过压簧和轮辐相连,分体式编码器的码盘固定于轮芯上,解码器固定于轮辐上;电机的驱动力矩通过
一种变刚度弹性驱动器.pdf
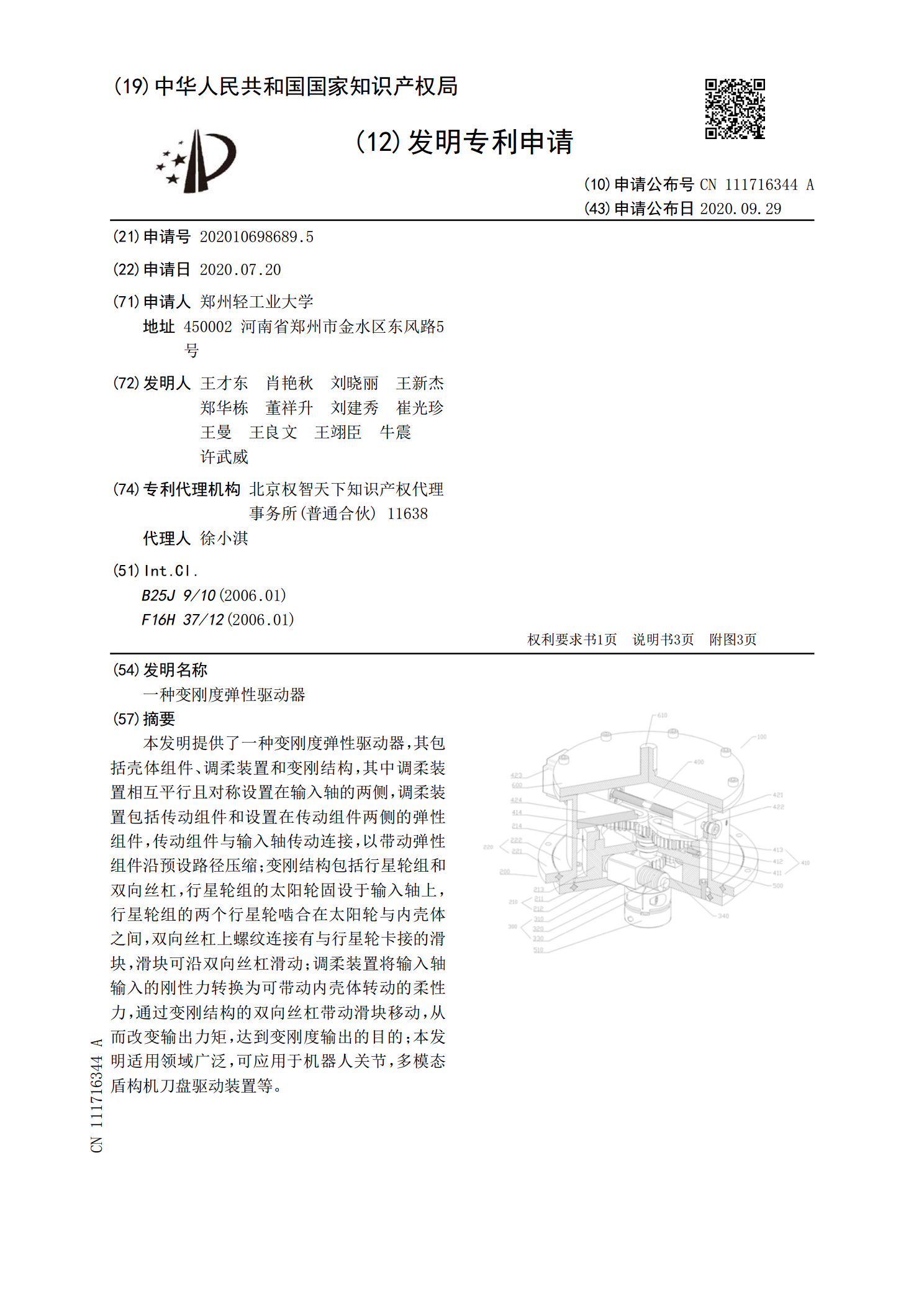
本发明提供了一种变刚度弹性驱动器,其包括壳体组件、调柔装置和变刚结构,其中调柔装置相互平行且对称设置在输入轴的两侧,调柔装置包括传动组件和设置在传动组件两侧的弹性组件,传动组件与输入轴传动连接,以带动弹性组件沿预设路径压缩;变刚结构包括行星轮组和双向丝杠,行星轮组的太阳轮固设于输入轴上,行星轮组的两个行星轮啮合在太阳轮与内壳体之间,双向丝杠上螺纹连接有与行星轮卡接的滑块,滑块可沿双向丝杠滑动;调柔装置将输入轴输入的刚性力转换为可带动内壳体转动的柔性力,通过变刚结构的双向丝杠带动滑块移动,从而改变输出力矩,
基于非线性弹性元件的可调刚度驱动器及其驱动方法.pdf
本发明公开了一种基于非线性弹性元件的可调刚度驱动器,包括:控制电路、微处理器、驱动电机、转轴、减速机构、非线性弹簧和齿轮蜗杆;本发明还公开一种驱动基于非线性弹性元件的可调刚度驱动器的驱动方法,包括以下步骤:1、微处理器根据给定输出力矩和输出刚度计算得到两根非线性弹簧的伸缩量;2、微处理器通过PD控制将相应计算结果传给两个驱动电机,驱动电机输出相应的力矩于各自转轴中;3、两个齿轮蜗杆分别将两个驱动电机输出的力矩转换为水平拉力,分别改变两根非线性弹簧的伸缩量;4、驱动器通过两根非线性弹簧各自的伸缩量实时输出相