
一种串联弹性驱动器.pdf

醉香****mm

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种串联弹性驱动器.pdf
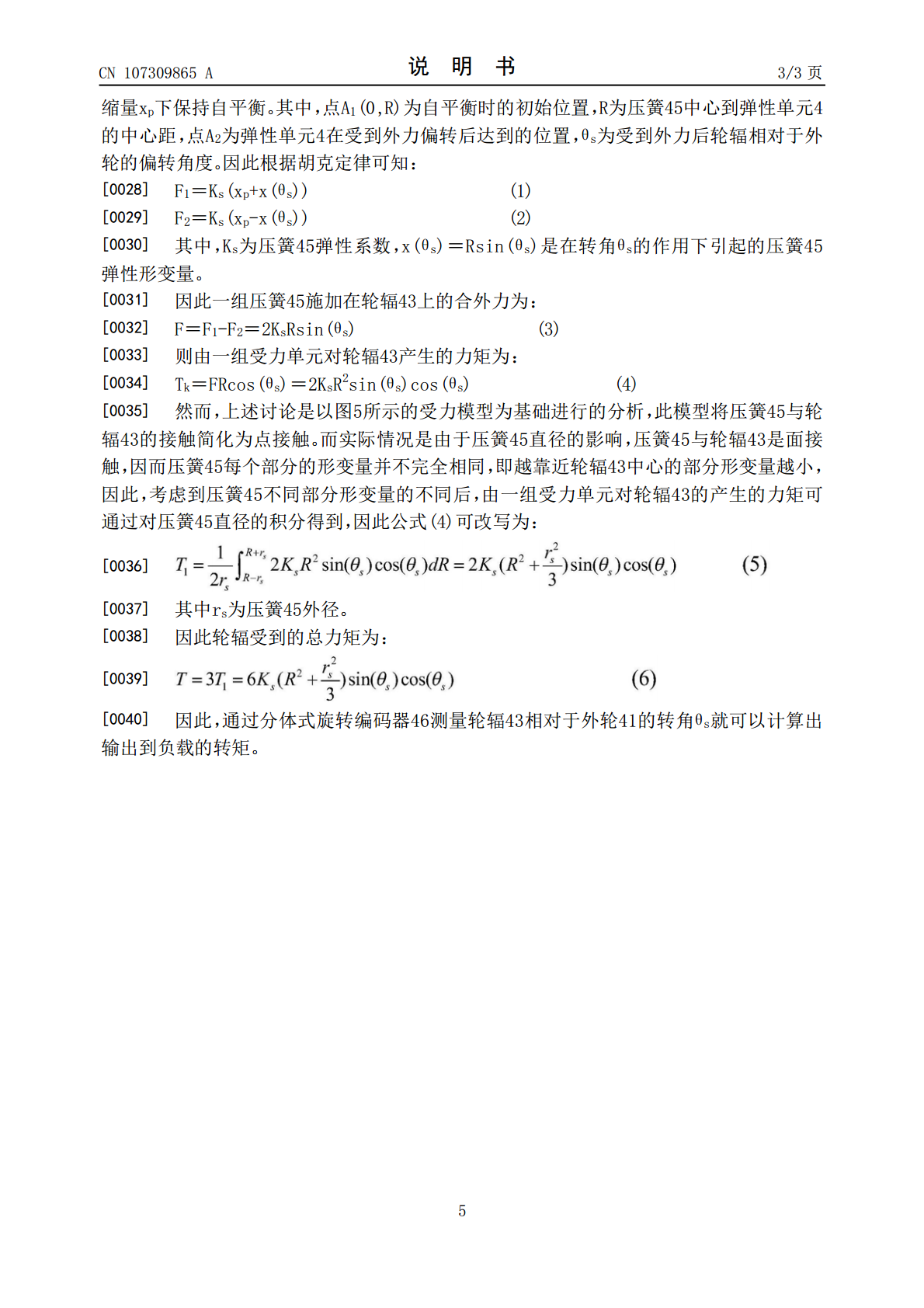
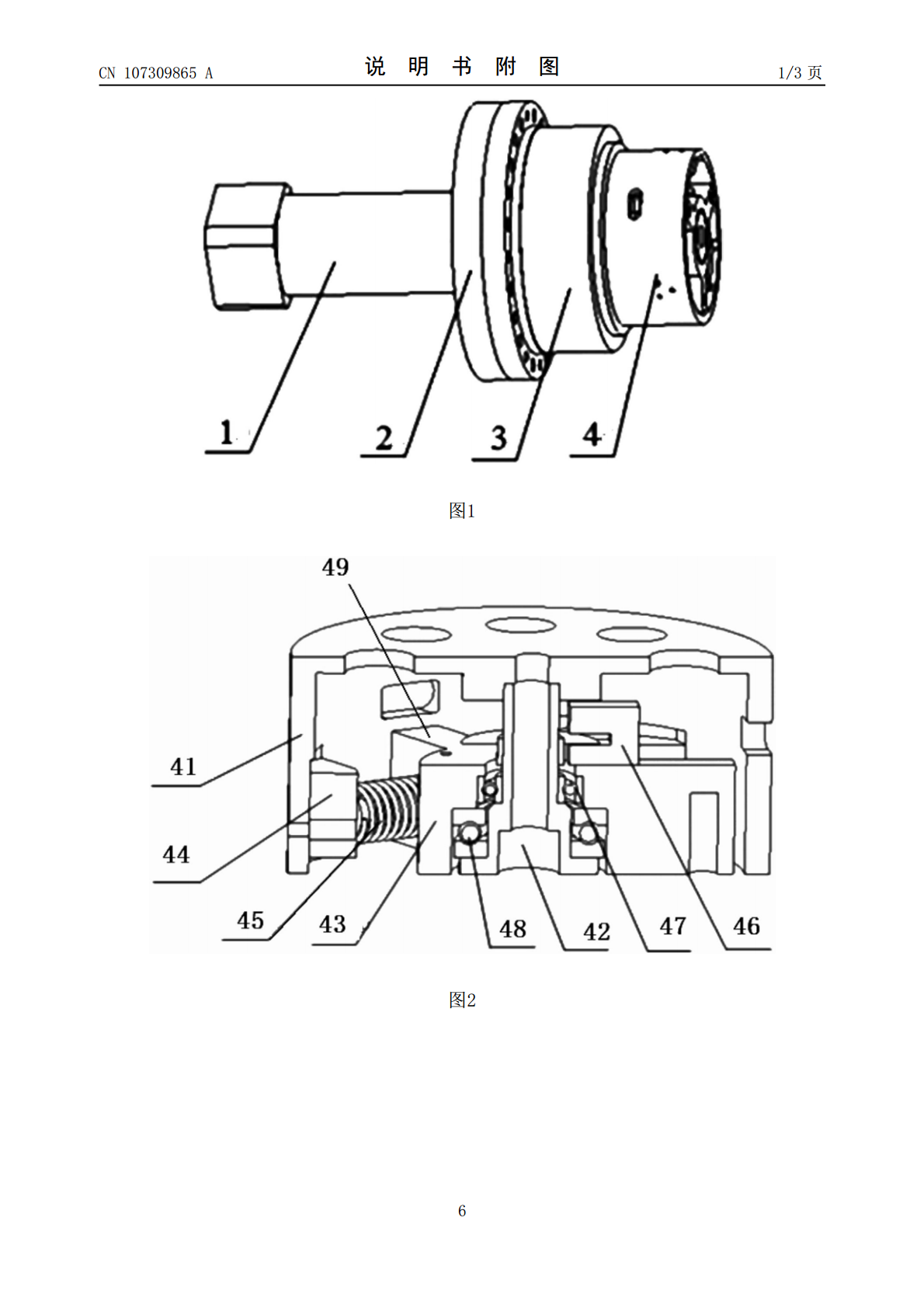
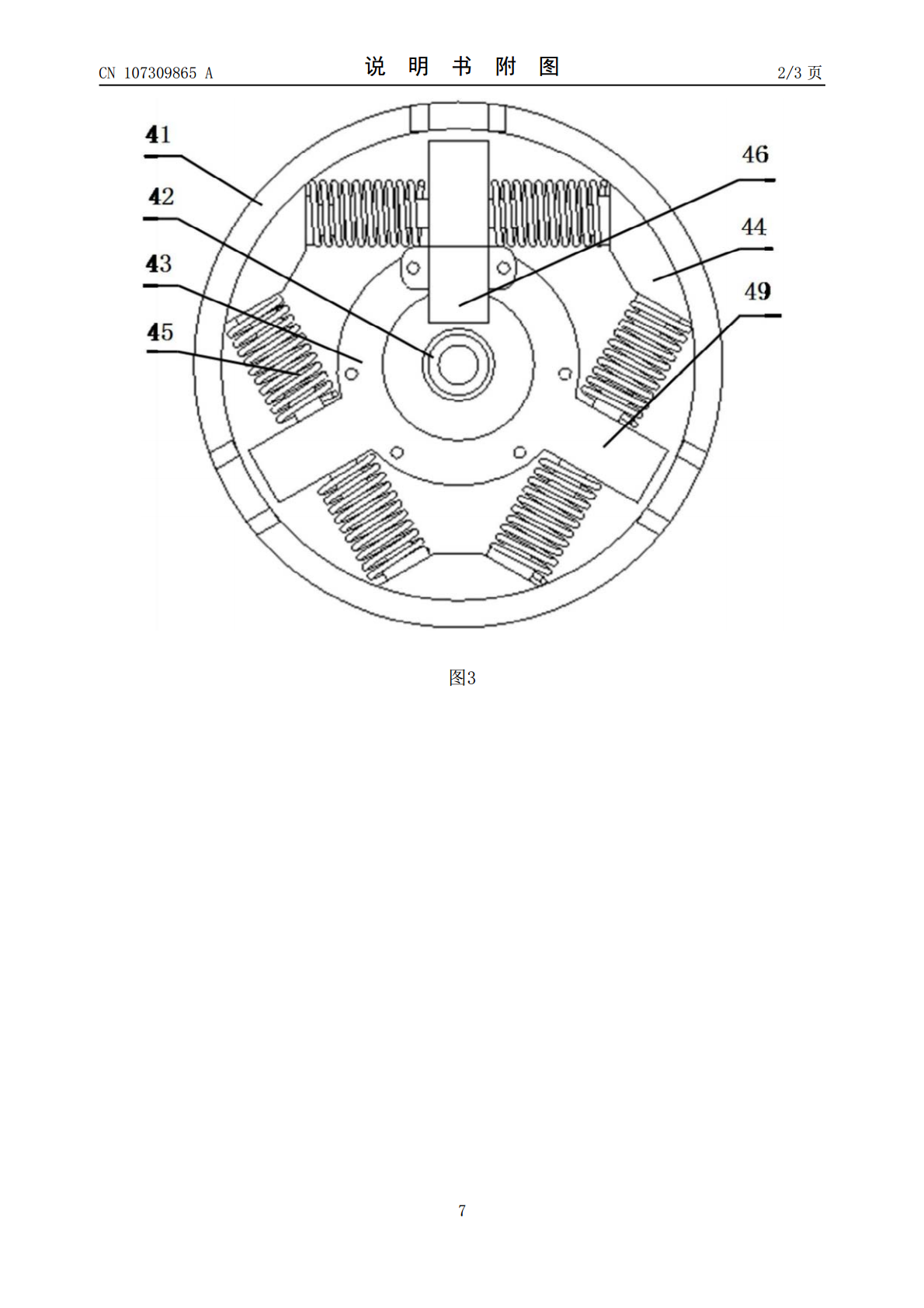
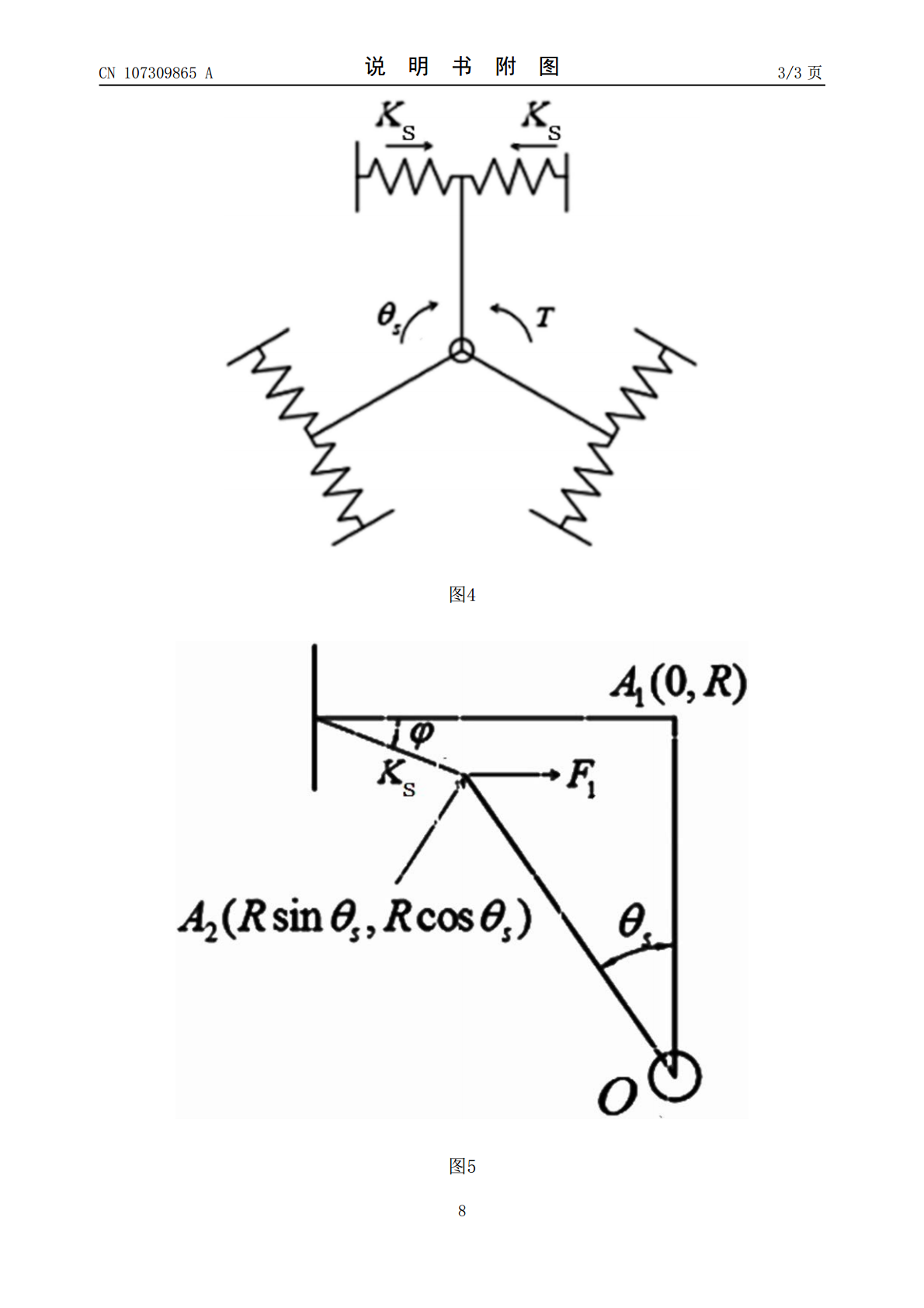
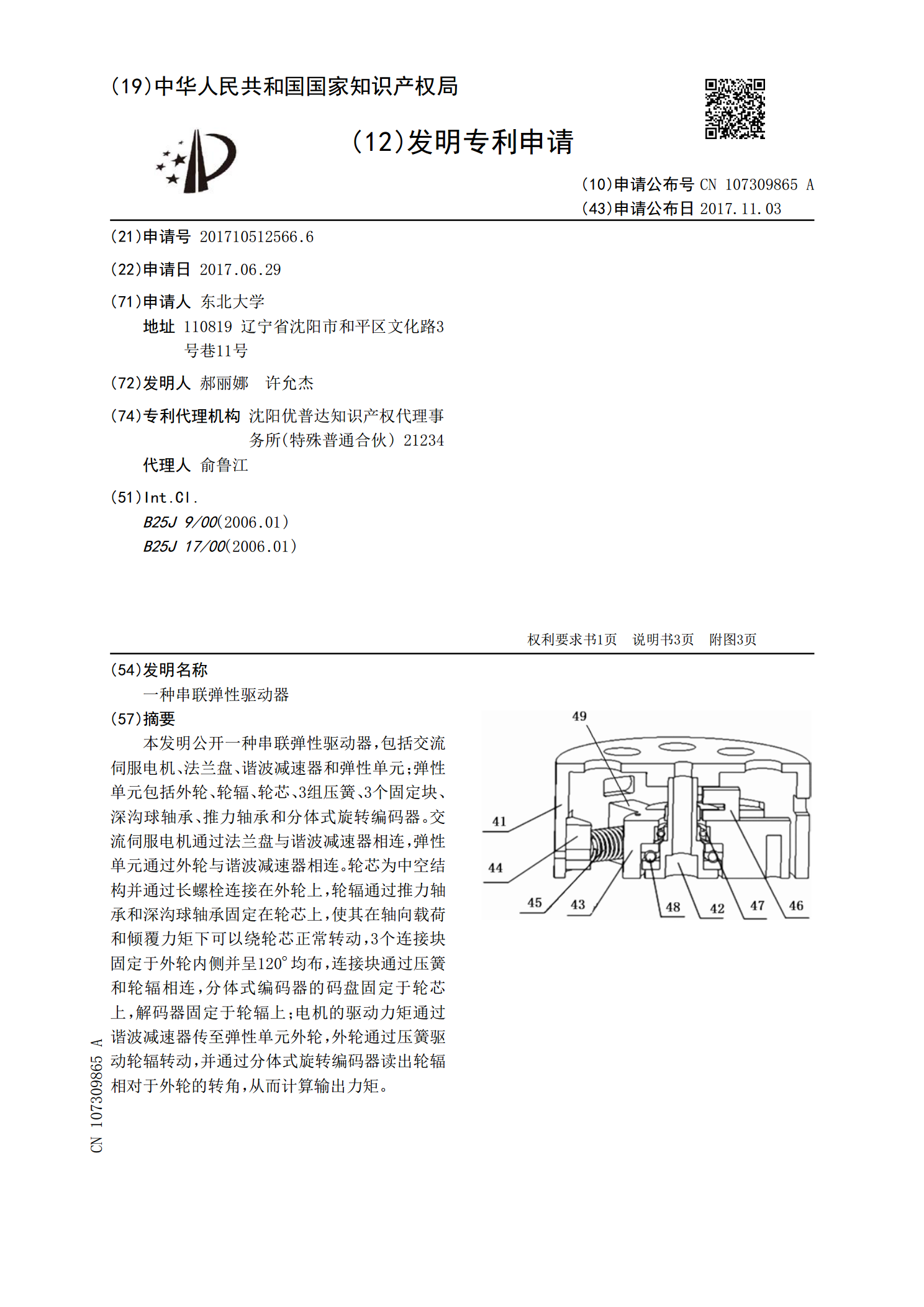
本发明公开一种串联弹性驱动器,包括交流伺服电机、法兰盘、谐波减速器和弹性单元;弹性单元包括外轮、轮辐、轮芯、3组压簧、3个固定块、深沟球轴承、推力轴承和分体式旋转编码器。交流伺服电机通过法兰盘与谐波减速器相连,弹性单元通过外轮与谐波减速器相连。轮芯为中空结构并通过长螺栓连接在外轮上,轮辐通过推力轴承和深沟球轴承固定在轮芯上,使其在轴向载荷和倾覆力矩下可以绕轮芯正常转动,3个连接块固定于外轮内侧并呈120°均布,连接块通过压簧和轮辐相连,分体式编码器的码盘固定于轮芯上,解码器固定于轮辐上;电机的驱动力矩通过

一种单向串联弹性驱动器.pdf
一种单向串联弹性驱动器,它涉及一种可用于机器人下肢关节的驱动器,以解决现有刚性驱动器缺少柔性,容易受到外界冲击力的破坏以及现有弹性驱动器传递动力具有一定的时滞性,影响系统的响应速度的问题,它包括电机、电机座、扭转弹簧、第一轮毂、第二轮毂、第一卡环、第二卡环和输出轴;第一轮毂通过两个第一凸爪和两个第二凸爪与第二轮毂连接为一体,第一轮毂安装在第一卡环内,第二轮毂安装在第二卡环内,电机的输出端与第一轮毂的一端连接,第二轮毂的一端与输出轴连接,扭转弹簧套装在第一凸爪和第二凸爪上,第一卡环的第一凸台顶压扭转弹簧的一

一种刚柔切换的串联弹性驱动器.pdf
本发明公开了一种刚柔切换的串联弹性驱动器,包括支撑保护模块、外部输入模块、负载驱动模块、刚柔切换模块;其中支撑保护模块用于安装外部输入模块、负载驱动模块、刚柔切换模块;外部输入模块通过关节球轴承I与第一连接部连接,将第一连接部力传递到外部输入模块中的弹簧I上;负载驱动模块通过关节球轴承II与第二连接部连接,由驱动电机提供输出力矩对第二连接部进行驱动;刚柔切换模块在减速电机驱动下完成弹簧I的锁紧与放松。本发明结构紧凑;实现了刚性模式与柔性模式之间的切换,可以满足为穿戴者提供腰部助力、腰部支撑两种不同的使用需
一种分体式串联弹性驱动器.pdf
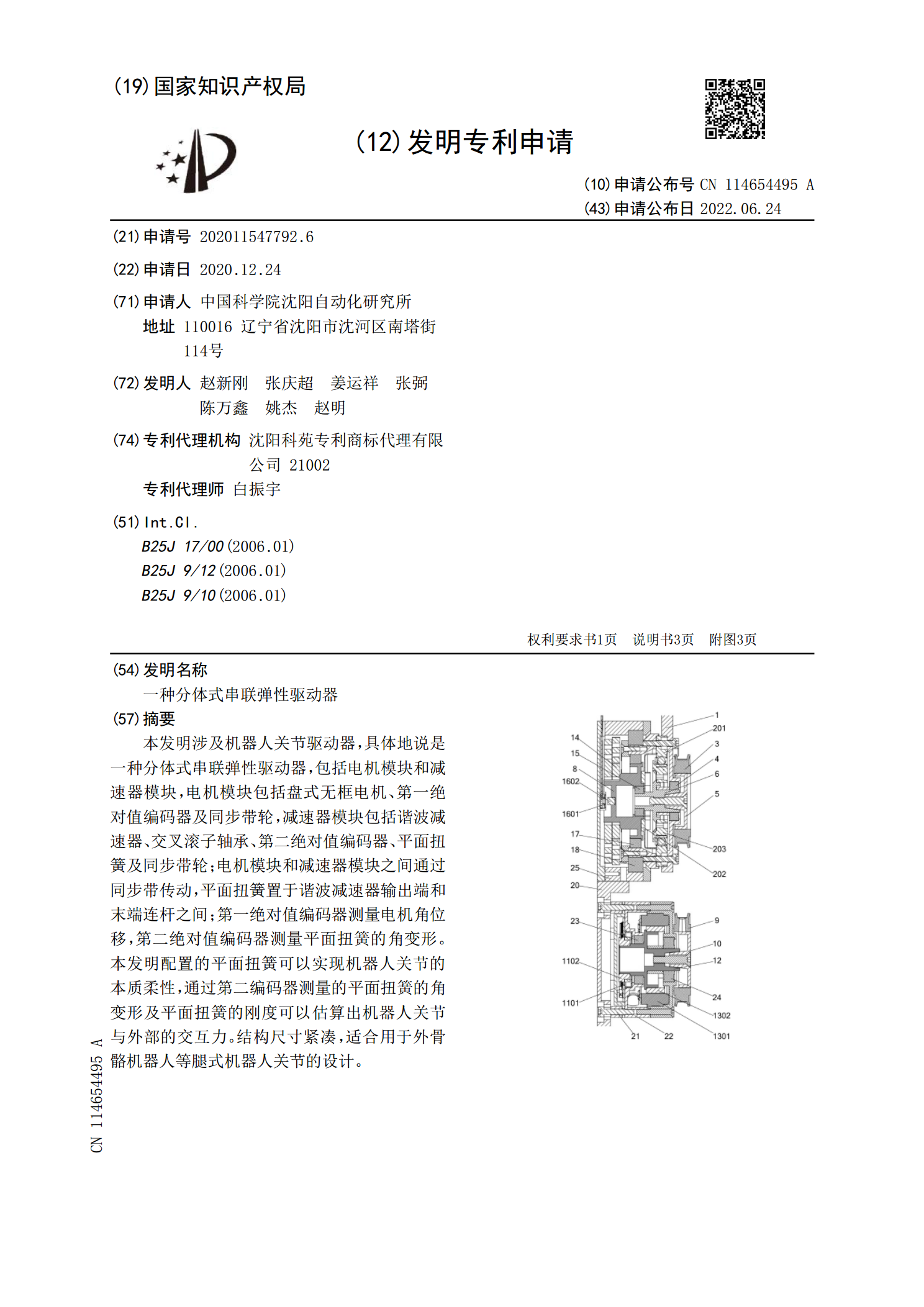
本发明涉及机器人关节驱动器,具体地说是一种分体式串联弹性驱动器,包括电机模块和减速器模块,电机模块包括盘式无框电机、第一绝对值编码器及同步带轮,减速器模块包括谐波减速器、交叉滚子轴承、第二绝对值编码器、平面扭簧及同步带轮;电机模块和减速器模块之间通过同步带传动,平面扭簧置于谐波减速器输出端和末端连杆之间;第一绝对值编码器测量电机角位移,第二绝对值编码器测量平面扭簧的角变形。本发明配置的平面扭簧可以实现机器人关节的本质柔性,通过第二编码器测量的平面扭簧的角变形及平面扭簧的刚度可以估算出机器人关节与外部的交互

基于压簧的线性串联弹性驱动器.pdf
本发明为一种基于压簧的线性弹性驱动器,包括编码器、伺服电机、驱动器底座、联轴器、轴承、轴承滚动底盘、压簧、铜柱、压簧固定顶板和底板、输出轴和负载连接单元,编码器与驱动输出轴相连测量负载端转动的角度,伺服电机的法兰盘与轴承滚动底盘相连,轴承滚动底盘上加工线性轨道,使得驱动器输出力矩和电机与负载间相对转角呈线性关系。压簧固定底板上开有间隔120°的三个螺纹孔,每个螺纹孔处分别安装铜柱,并将压簧套装在铜柱上,负载连接单元留置负载安装孔。本发明是一种新型的高能量密度、线性化的弹性驱动器,为设计一种具有本质安全特性