
用于夹持自动螺丝刀的三轴坐标定位平衡支架及其调整方法.pdf

东耀****哥哥


1/6
2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于夹持自动螺丝刀的三轴坐标定位平衡支架及其调整方法.pdf
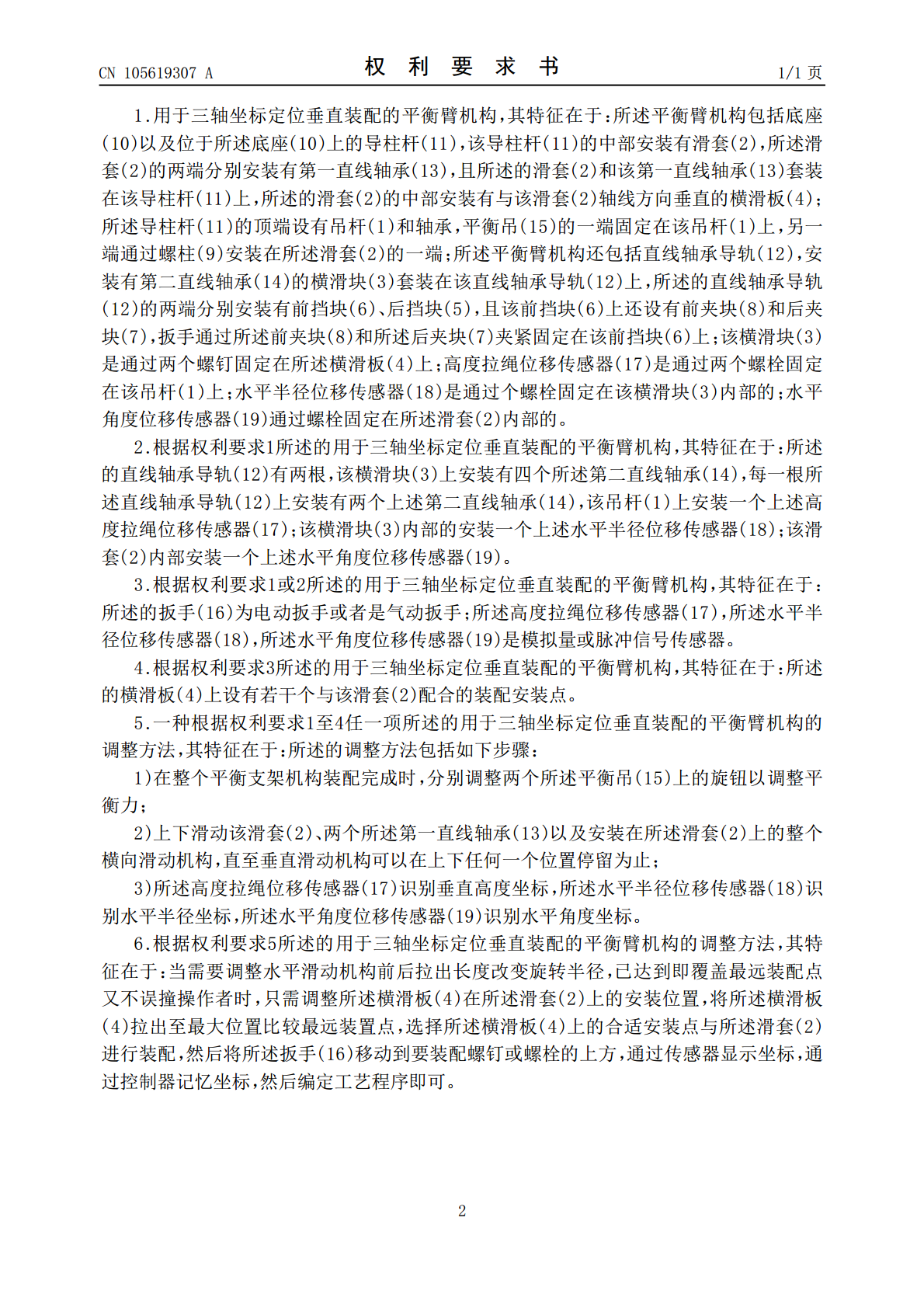
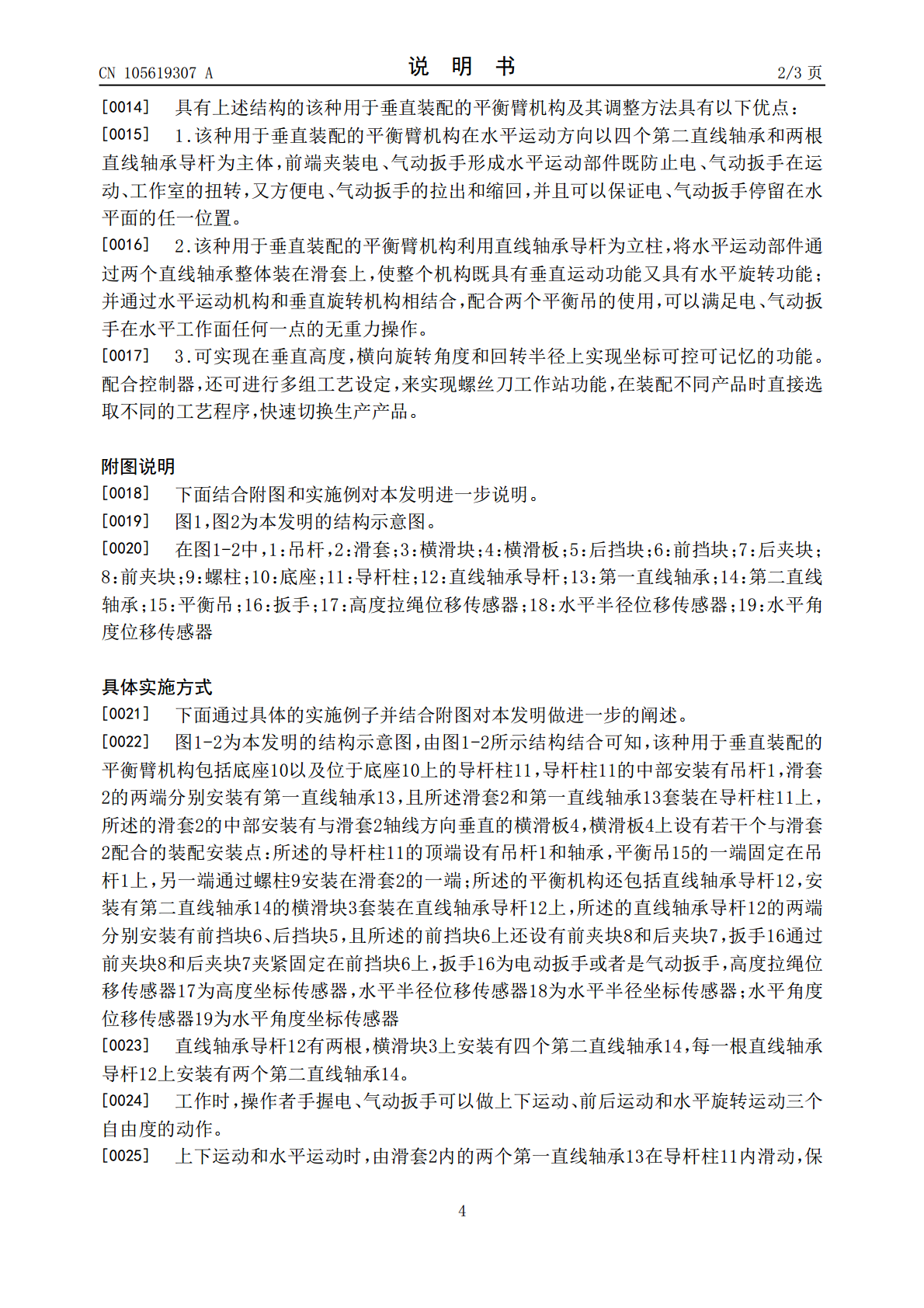
本发明公开了一种用于三轴坐标定位垂直装配的平衡臂机构及其调整方法,平衡臂机构包括底座、位于底座上的导杆柱,导杆柱中部安装有滑套,滑套两端分别安装有第一直线轴承,滑套中部安装有与滑套轴线方向垂直的横滑块和导杆,导杆柱顶端设有吊杆和轴承,弹簧平衡器的一段固定在吊杆上,另一端通过螺柱安装在滑套的一端;平衡机构还包括第二直线轴承导杆,安装有直线轴承的横滑块套装在直线轴承导杆上,直线轴承导杆的两端分别安装有前挡块、后挡块,且前挡块上还设有前夹块和后夹块,扳手通过前夹块和后夹块夹紧固定在前挡块上。保证扳手在任何一个空
手机自动夹持支架及其控制方法和系统.pdf
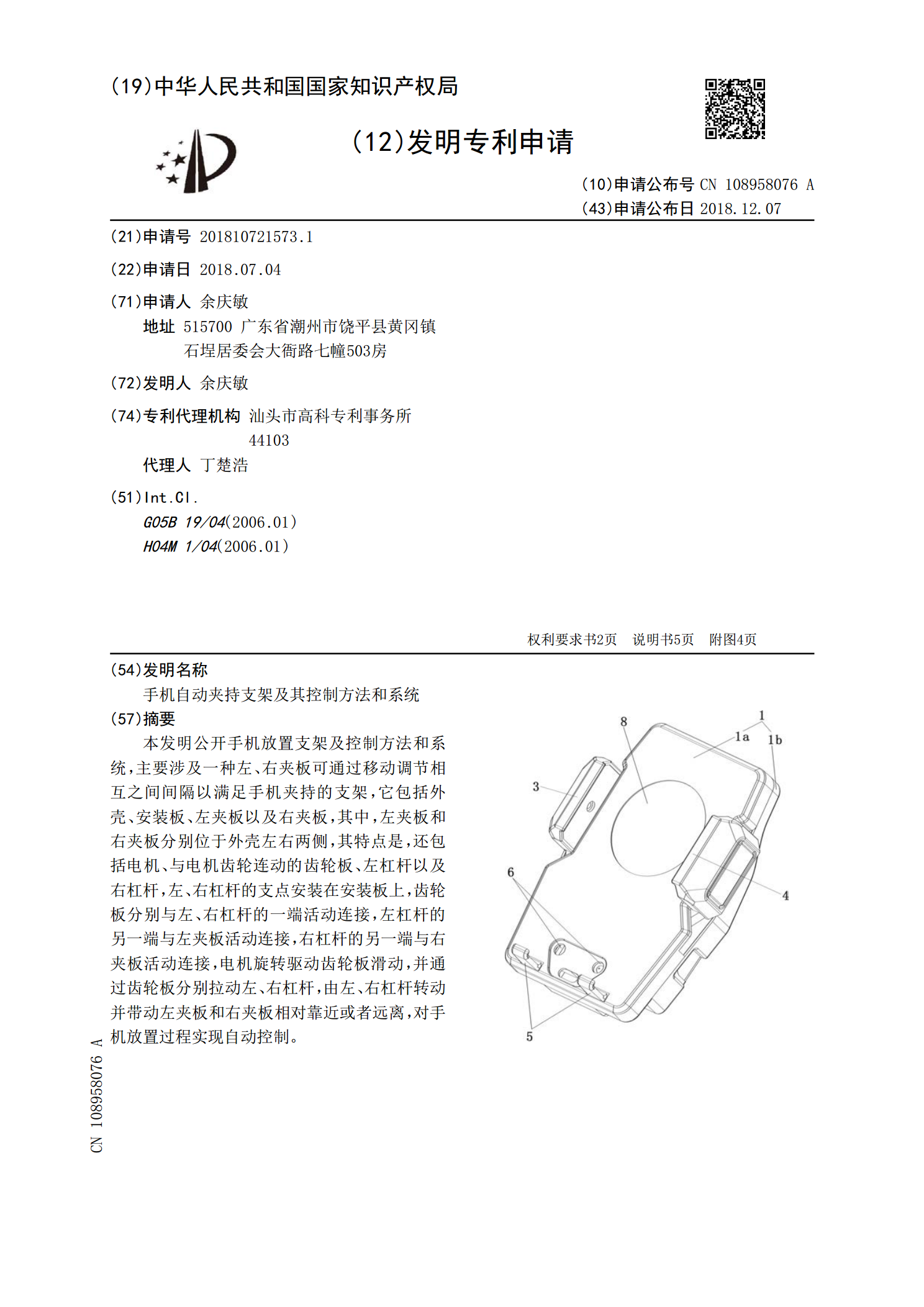
本发明公开手机放置支架及控制方法和系统,主要涉及一种左、右夹板可通过移动调节相互之间间隔以满足手机夹持的支架,它包括外壳、安装板、左夹板以及右夹板,其中,左夹板和右夹板分别位于外壳左右两侧,其特点是,还包括电机、与电机齿轮连动的齿轮板、左杠杆以及右杠杆,左、右杠杆的支点安装在安装板上,齿轮板分别与左、右杠杆的一端活动连接,左杠杆的另一端与左夹板活动连接,右杠杆的另一端与右夹板活动连接,电机旋转驱动齿轮板滑动,并通过齿轮板分别拉动左、右杠杆,由左、右杠杆转动并带动左夹板和右夹板相对靠近或者远离,对手机放置过

用于取间隔纸机的三轴调整装置及其调整方法.pdf
本发明公开了一种用于取间隔纸机的三轴调整装置及其调整方法,该三轴调整装置的结构中包括支撑架、借助第一滑动副装配在支撑架上的X轴行走单元、以及沿X轴行走单元底面设置的第二滑动副,在第二滑动副的滑动部件上固定连接有Z轴旋转机构,所述Z轴旋转机构的旋转端与取间隔纸机构固定连接;所述取间隔纸机构借助X轴行走单元、第二滑动副和Z轴旋转机构,具有沿X轴、第二滑动副和Z轴调整的自由度。并采用PLC计算调整Z轴旋转机构的调整量和调整方向,可精确控制取纸单元与玻璃基板的平行度,提高了取纸成功率,且结构简单、成本较低。

用于制造平衡轴的方法.pdf
本发明提出一种用于由模锻而成的轴毛坯(11)来制造平衡轴(1)的方法。平衡轴具有轴段(5),该轴段具有基体(16)和从该基体伸出来的高度为H的肋(15)。在此,设置有以下方法步骤:通过在修边部位上将所锻造的轴毛坯修边成基体接近最终轮廓的形状,而分离在锻模(9、10)内构成的锻造毛边(14),这些修边部位彼此间的距离S2明显小于分离之前锻造毛边彼此间的距离S1。
一种自动测量轴力、调整轴力的装置及其方法.pdf
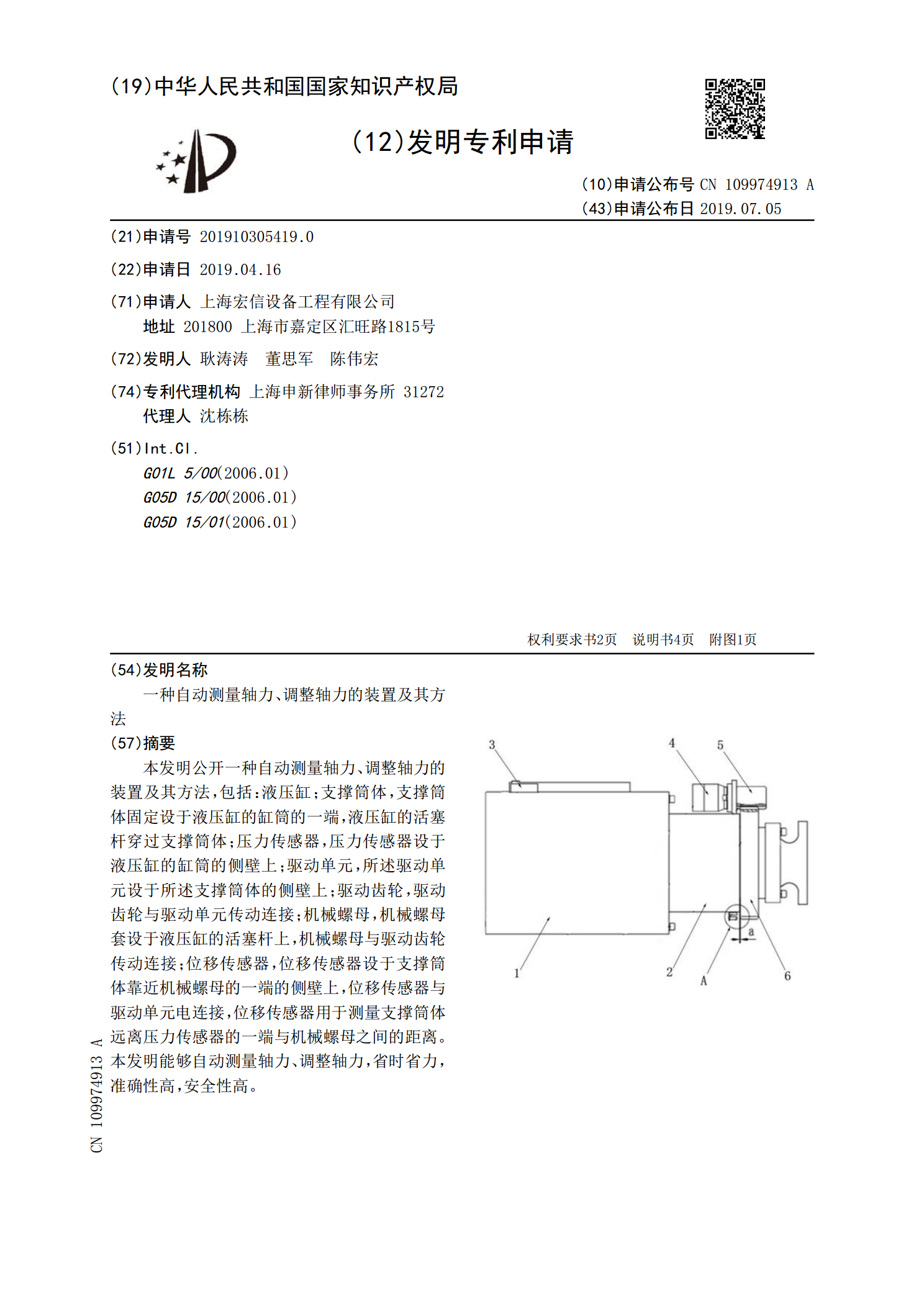
本发明公开一种自动测量轴力、调整轴力的装置及其方法,包括:液压缸;支撑筒体,支撑筒体固定设于液压缸的缸筒的一端,液压缸的活塞杆穿过支撑筒体;压力传感器,压力传感器设于液压缸的缸筒的侧壁上;驱动单元,所述驱动单元设于所述支撑筒体的侧壁上;驱动齿轮,驱动齿轮与驱动单元传动连接;机械螺母,机械螺母套设于液压缸的活塞杆上,机械螺母与驱动齿轮传动连接;位移传感器,位移传感器设于支撑筒体靠近机械螺母的一端的侧壁上,位移传感器与驱动单元电连接,位移传感器用于测量支撑筒体远离压力传感器的一端与机械螺母之间的距离。本发明能