
控制无人机飞行的方法及装置.pdf

朋兴****en


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

控制无人机飞行的方法及装置.pdf
本发明实施例提供了一种控制无人机飞行的方法及装置,其中所述方法包括:确定无人机当前所停留的起始飞行位置以及机头方向;从所述起始飞行位置出发,沿着所述机头方向直线飞行;在飞行过程中,若接收到路线调节指令,基于所述路线调节指令调节所述无人机的航线。本发明实施例可以在不进行测绘的情况下,在飞行的过程中,当操作人员检测到无人机飞行偏离航线时,可以通过遥控装置对航线进行修正,操作人员通过简单的操作就可以让无人机沿着想要的直线精准飞行,简化了操作过程,提升了无人机的应变能力。
无人机的飞行控制方法、装置和无人机.pdf
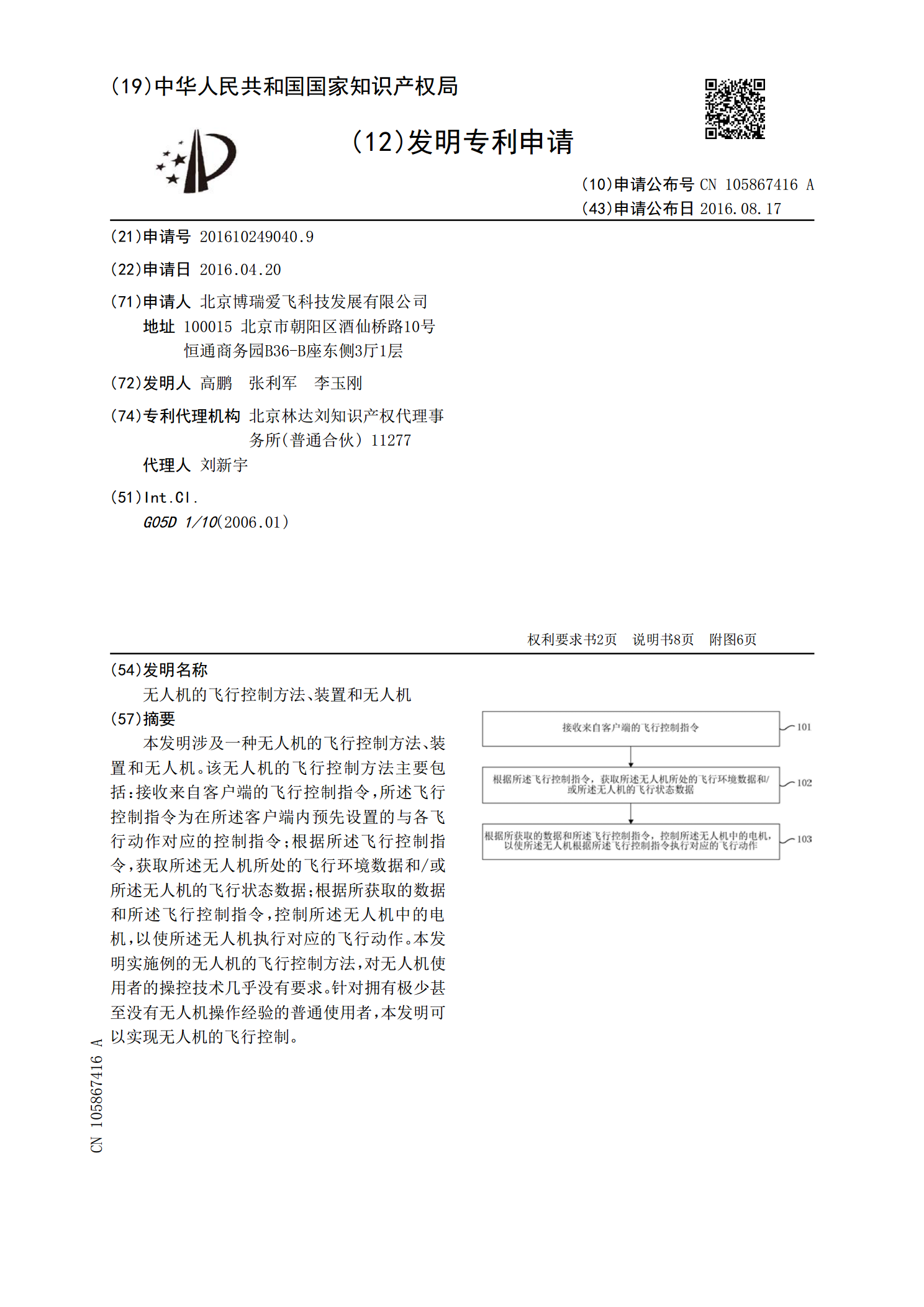
本发明涉及一种无人机的飞行控制方法、装置和无人机。该无人机的飞行控制方法主要包括:接收来自客户端的飞行控制指令,所述飞行控制指令为在所述客户端内预先设置的与各飞行动作对应的控制指令;根据所述飞行控制指令,获取所述无人机所处的飞行环境数据和/或所述无人机的飞行状态数据;根据所获取的数据和所述飞行控制指令,控制所述无人机中的电机,以使所述无人机执行对应的飞行动作。本发明实施例的无人机的飞行控制方法,对无人机使用者的操控技术几乎没有要求。针对拥有极少甚至没有无人机操作经验的普通使用者,本发明可以实现无人机的飞行

无人机的飞行动作控制方法及装置.pdf
本发明适用于无人机技术领域,提供了无人机的飞行动作控制方法及装置,包括:基于音频文件播放的时间轴,分别解析得到所述音频文件在所述时间轴的不同时间段内的音频特征参数;获取与每个所述时间段内的音频特征参数一一对应的飞行动作,生成飞行动作指令;将所述飞行动作指令发送至无人机,以在播放所述音频文件的同时,使所述无人机同步执行所述飞行动作。本发明可以根据音乐的音频特征来实现对无人机的飞行动作控制,使得在终端播放音乐的同时,无人机在空中同步执行飞行动作,达到无人机在空中起舞的效果,不但丰富了对无人机的飞行动作控制的模

无人机飞行控制方法、装置、设备及存储介质.pdf
本发明属于无人机技术领域,公开了一种无人机飞行控制方法、装置、设备及存储介质。所述无人机飞行控制方法应用于无人机,所述无人机上设有视觉传感器,该方法包括:获取无人机上视觉传感器采集的飞行图像,并提取飞行图像中的目标特征点;根据目标特征点的地面坐标确定坐标关系式;根据坐标关系式构建无人机的优化动力学模型;根据优化动力学模型和目标期望位置对无人机进行姿态调整,以控制无人机到达目标期望位置。通过上述方式,实现了基于飞行图像来辅助无人机的姿态控制,降低了无人机在对GPS的依赖性,弥补了无人机在定位时的缺陷,提高了

无人机飞行控制方法、装置、终端设备及介质.pdf
本发明公开了一种无人机飞行控制方法、装置、终端设备及计算机可读存储介质,该方法包括:获取飞行控制指令,其中,所述飞行控制指令由用户通过控制终端的可触摸显示屏触发;根据所述飞行控制指令,获取无人机的飞行参数;将所述飞行参数发送发送至所述无人机,以供所述无人机按照所述飞行参数进行飞行,所述飞行参数包括飞行路径、飞行速度、飞行角度和无人机搭载的显示装置的显示方式中的一种或者多种,其中,所述飞行速度由用户通过所述可触摸显示屏绘制所述飞行路径时产生的触屏压力确定。本发明能够实现无人机的灵活控制,进而提升用户体验。