
无人机飞行控制方法、装置、设备及存储介质.pdf

永香****能手

1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

无人机飞行控制方法、装置、设备及存储介质.pdf
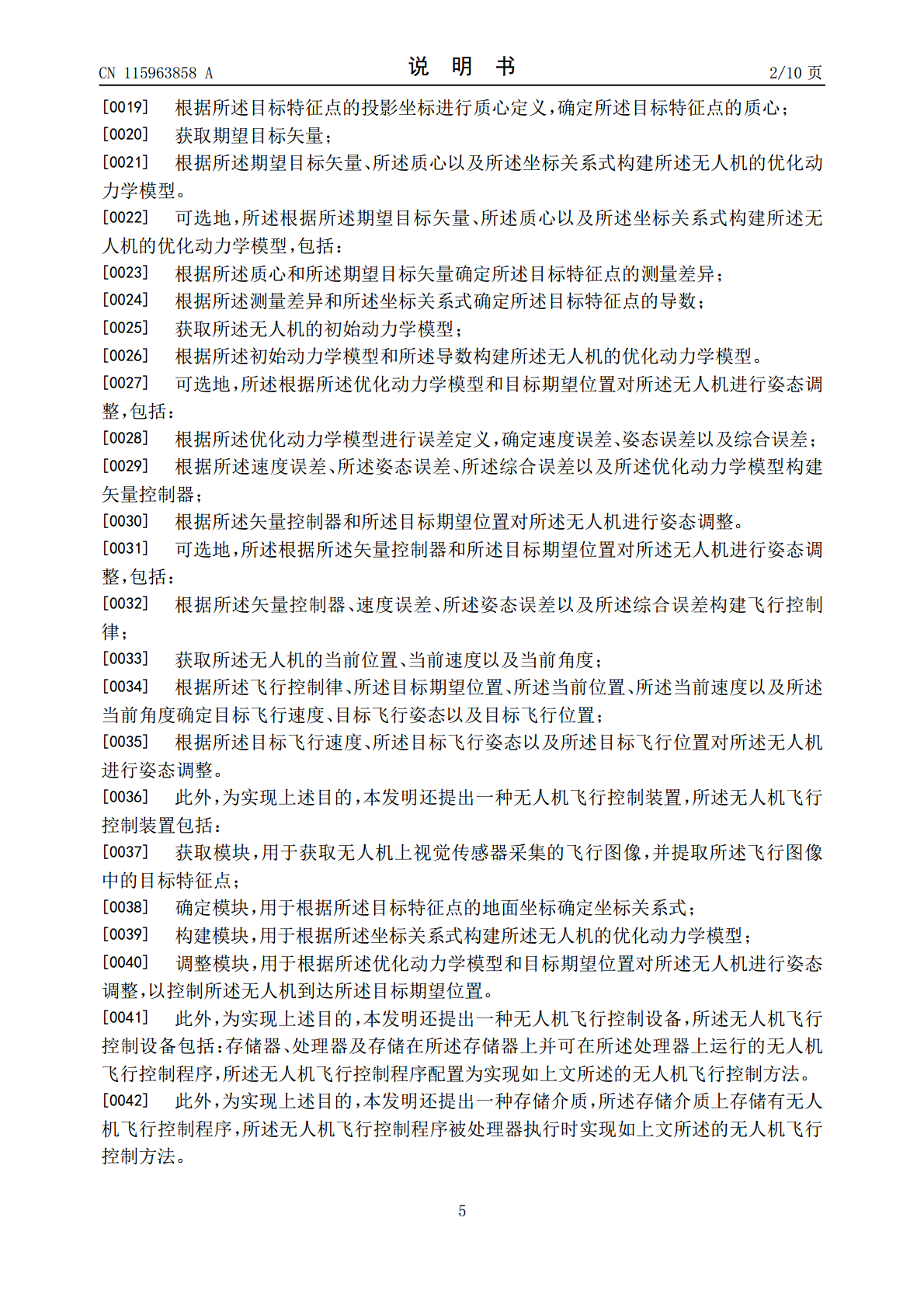
本发明属于无人机技术领域,公开了一种无人机飞行控制方法、装置、设备及存储介质。所述无人机飞行控制方法应用于无人机,所述无人机上设有视觉传感器,该方法包括:获取无人机上视觉传感器采集的飞行图像,并提取飞行图像中的目标特征点;根据目标特征点的地面坐标确定坐标关系式;根据坐标关系式构建无人机的优化动力学模型;根据优化动力学模型和目标期望位置对无人机进行姿态调整,以控制无人机到达目标期望位置。通过上述方式,实现了基于飞行图像来辅助无人机的姿态控制,降低了无人机在对GPS的依赖性,弥补了无人机在定位时的缺陷,提高了

飞行设备的控制方法和装置、飞行设备及存储介质.pdf
本申请实施例提供了一种飞行设备的控制方法和装置、飞行设备、存储介质及电子装置,其中,该方法包括:第二仲裁模块接收第一仲裁模块转发的N个控制指令,其中,N个控制指令是由N个飞控模块发送给第一仲裁模块的;第二仲裁模块和第一仲裁模块分别基于预定规则从N个控制指令中确定出第二指令和第一指令,并将两者进行比较,当比较结果表示第一指令所指示的执行机构的运动参数与第二指令所指示的执行机构的运动参数的误差超出预设阈值时,切断第一仲裁模块向继电器传输控制指令,并指示继电器将目标飞控模块的指令确定为目标控制指令,目标控制指令

控制无人机的方法、装置、设备、存储介质及无人机.pdf
本发明揭示了一种控制无人机的方法、装置、设备、存储介质及无人机,包括步骤:将无人机的实时飞行信息与对应的预设飞行信息段进行比较,获取所述实时飞行信息与所述预设飞行信息段的匹配程度;根据所述匹配程度生成吸入体积信息;接收吸入空气时的实时声音信息,并将所述实时声音信息与对应的历史声音信息段进行比较,获取所述实时声音信息与所述历史声音信息段的相似度;根据所述相似度生成实时反馈信息,并根据所述实时反馈信息控制所述无人机刺激使用者的感官。本发明的控制无人机的方法、装置、设备、存储介质及无人机,通过将实时声音信息与历

无人机飞行控制方法、装置、终端设备及介质.pdf
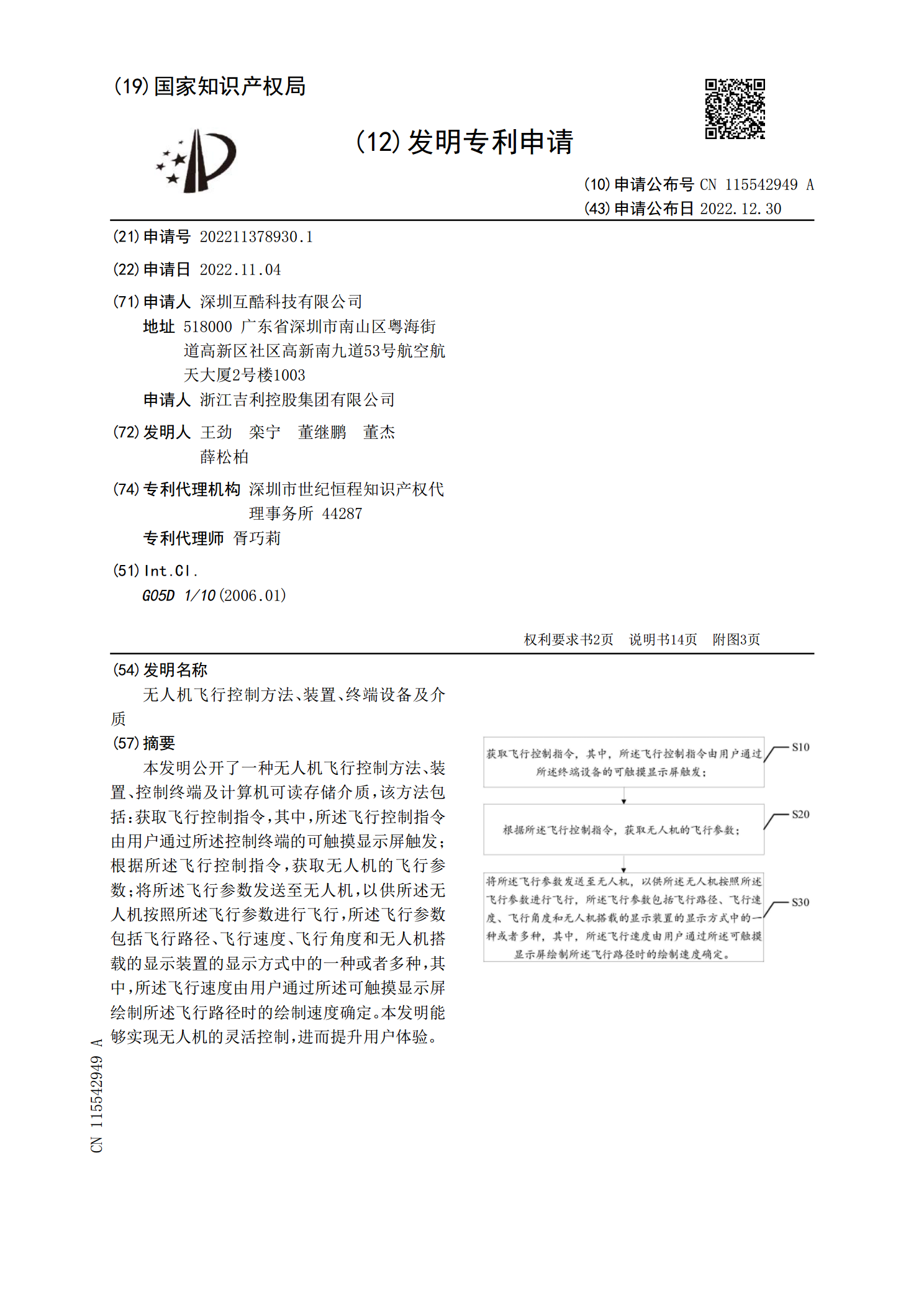
本发明公开了一种无人机飞行控制方法、装置、终端设备及计算机可读存储介质,该方法包括:获取飞行控制指令,其中,所述飞行控制指令由用户通过控制终端的可触摸显示屏触发;根据所述飞行控制指令,获取无人机的飞行参数;将所述飞行参数发送发送至所述无人机,以供所述无人机按照所述飞行参数进行飞行,所述飞行参数包括飞行路径、飞行速度、飞行角度和无人机搭载的显示装置的显示方式中的一种或者多种,其中,所述飞行速度由用户通过所述可触摸显示屏绘制所述飞行路径时产生的触屏压力确定。本发明能够实现无人机的灵活控制,进而提升用户体验。
无人机飞行控制方法、装置、终端设备及介质.pdf
本发明公开了一种无人机飞行控制方法、装置、终端设备及计算机可读存储介质,该方法包括:获取飞行控制指令,其中,所述飞行控制指令由用户通过控制终端的可触摸显示屏触发;根据所述飞行控制指令,获取无人机的飞行参数;将所述飞行参数发送发送至所述无人机,以供所述无人机按照所述飞行参数进行飞行,所述飞行参数包括飞行路径、飞行速度、飞行角度和无人机搭载的显示装置的显示方式中的一种或者多种,其中,所述飞行速度由用户通过所述可触摸显示屏绘制所述飞行路径时产生的触屏压力确定。本发明能够实现无人机的灵活控制,进而提升用户体验。