
系留式无人机自适应巡航跟踪方法、终端及存储介质.pdf

朋兴****en

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

系留式无人机自适应巡航跟踪方法、终端及存储介质.pdf
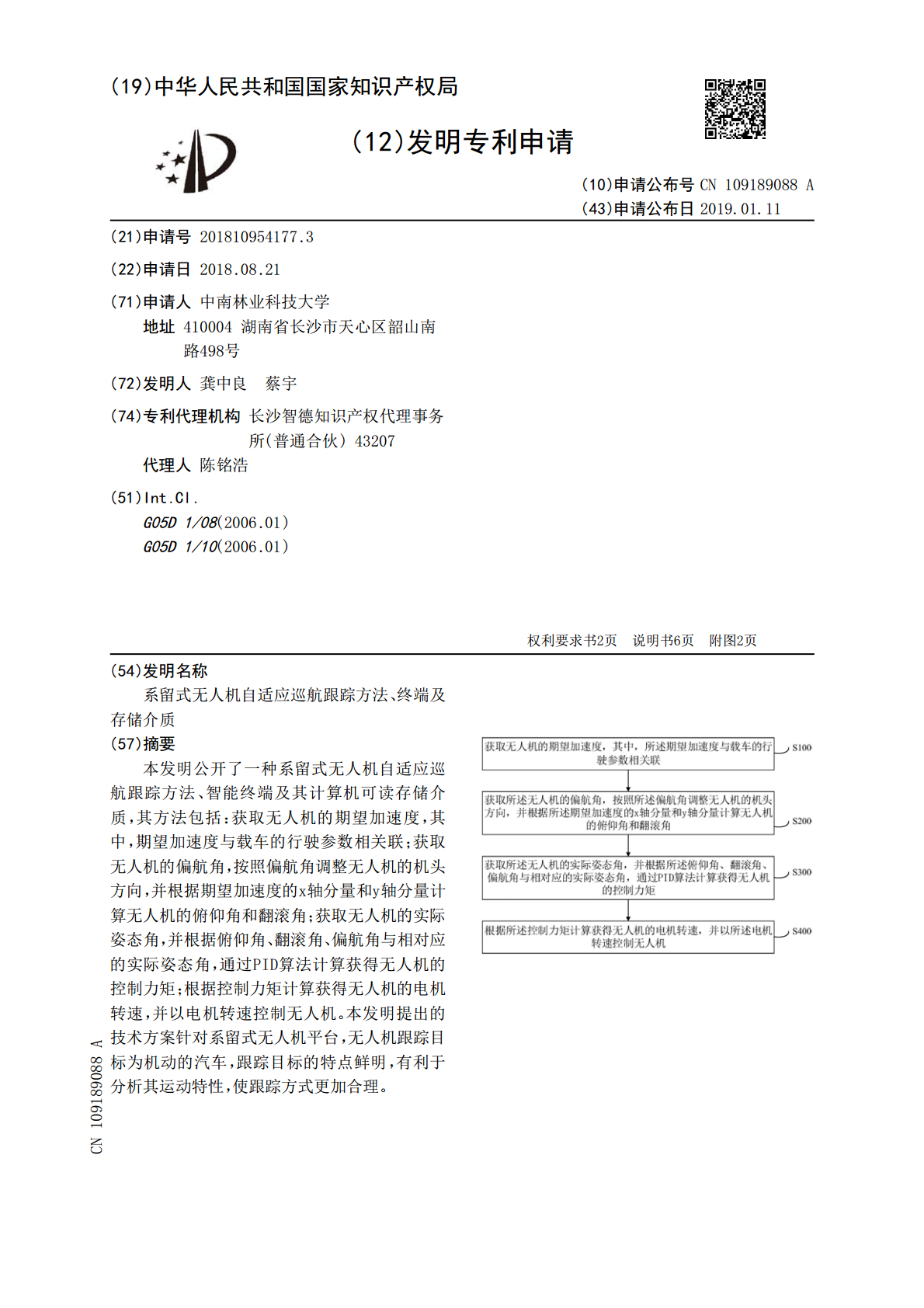
本发明公开了一种系留式无人机自适应巡航跟踪方法、智能终端及其计算机可读存储介质,其方法包括:获取无人机的期望加速度,其中,期望加速度与载车的行驶参数相关联;获取无人机的偏航角,按照偏航角调整无人机的机头方向,并根据期望加速度的x轴分量和y轴分量计算无人机的俯仰角和翻滚角;获取无人机的实际姿态角,并根据俯仰角、翻滚角、偏航角与相对应的实际姿态角,通过PID算法计算获得无人机的控制力矩;根据控制力矩计算获得无人机的电机转速,并以电机转速控制无人机。本发明提出的技术方案针对系留式无人机平台,无人机跟踪目标为机动
基于系留无人机的空中送货方法、系统、终端及介质.pdf
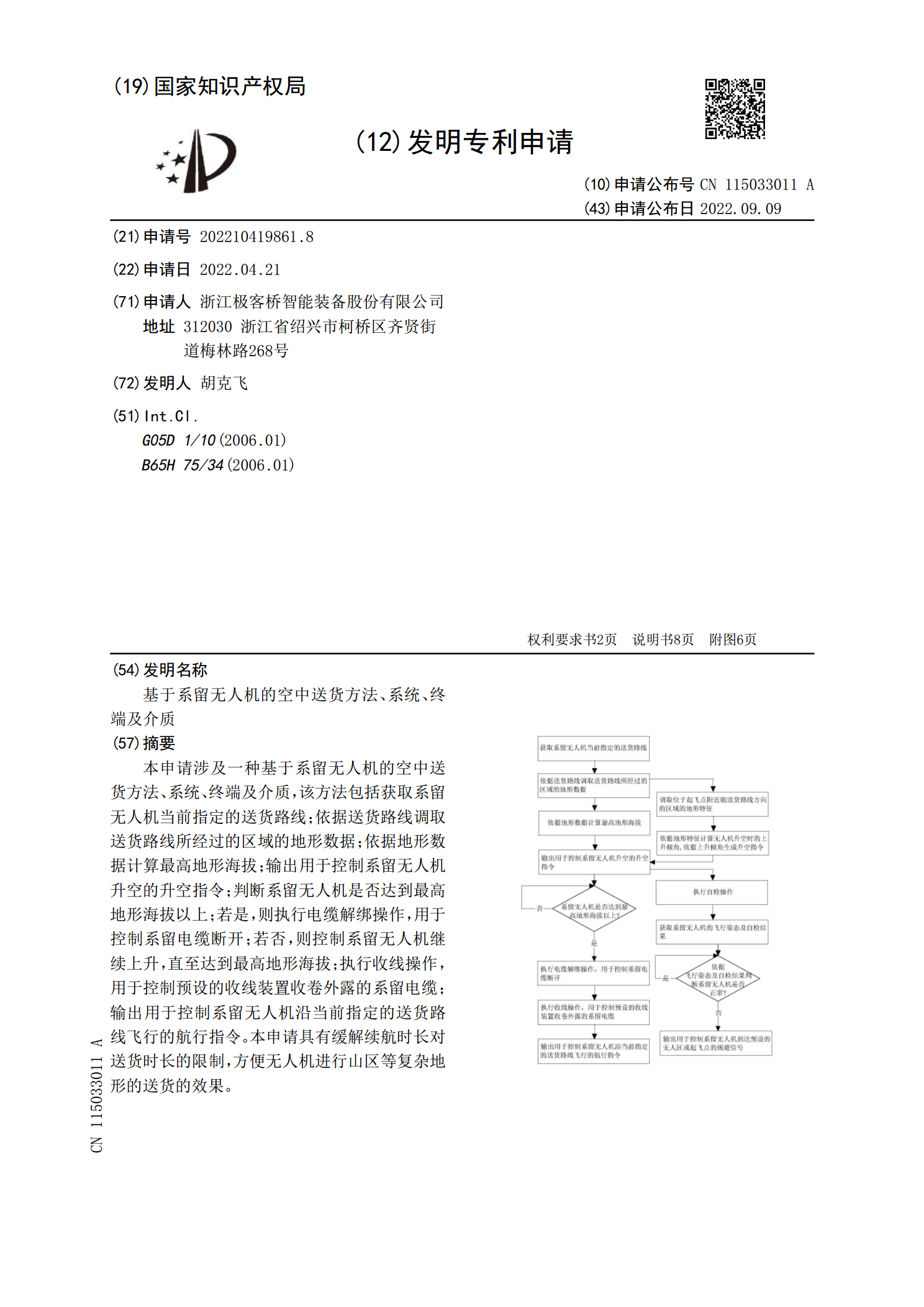
本申请涉及一种基于系留无人机的空中送货方法、系统、终端及介质,该方法包括获取系留无人机当前指定的送货路线;依据送货路线调取送货路线所经过的区域的地形数据;依据地形数据计算最高地形海拔;输出用于控制系留无人机升空的升空指令;判断系留无人机是否达到最高地形海拔以上;若是,则执行电缆解绑操作,用于控制系留电缆断开;若否,则控制系留无人机继续上升,直至达到最高地形海拔;执行收线操作,用于控制预设的收线装置收卷外露的系留电缆;输出用于控制系留无人机沿当前指定的送货路线飞行的航行指令。本申请具有缓解续航时长对送货时长

集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质.pdf
本发明公开的集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质,通过优化集成式自适应巡航系统的横向控制策略,以智慧偏移的方式,在合法合规的前提下,可有效降低行驶过程中的安全风险。该方法包括,判断邻道目标车辆与本车的碰撞时间和横向间距是否小于逻辑触发的安全距离阈值;若未小于安全距离阈值,则继续在当前车道对中行驶;若小于安全距离,往远离邻道目标车辆的方向横向偏移一定距离,同时,视两车横向距离情况,本车进行适当减速;当两车无碰撞风险后,本车分两段回偏,直至对中行驶。同时,在智慧偏移过程中通过向控制器发送
自适应容错无人机跟踪巡航系统及方法.pdf
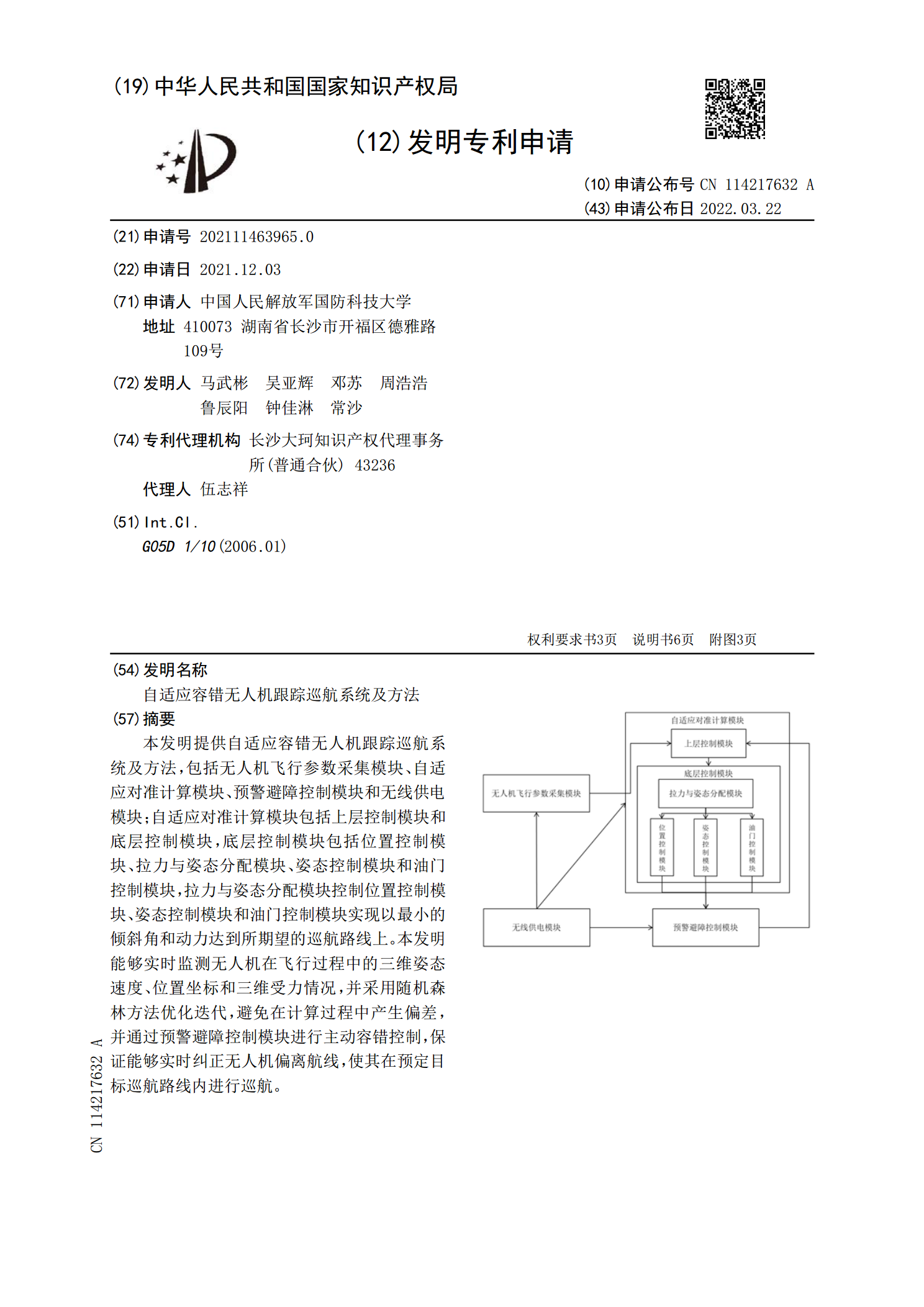
本发明提供自适应容错无人机跟踪巡航系统及方法,包括无人机飞行参数采集模块、自适应对准计算模块、预警避障控制模块和无线供电模块;自适应对准计算模块包括上层控制模块和底层控制模块,底层控制模块包括位置控制模块、拉力与姿态分配模块、姿态控制模块和油门控制模块,拉力与姿态分配模块控制位置控制模块、姿态控制模块和油门控制模块实现以最小的倾斜角和动力达到所期望的巡航路线上。本发明能够实时监测无人机在飞行过程中的三维姿态速度、位置坐标和三维受力情况,并采用随机森林方法优化迭代,避免在计算过程中产生偏差,并通过预警避障控
自适应巡航功能的测试评价方法、装置、车辆及存储介质.pdf
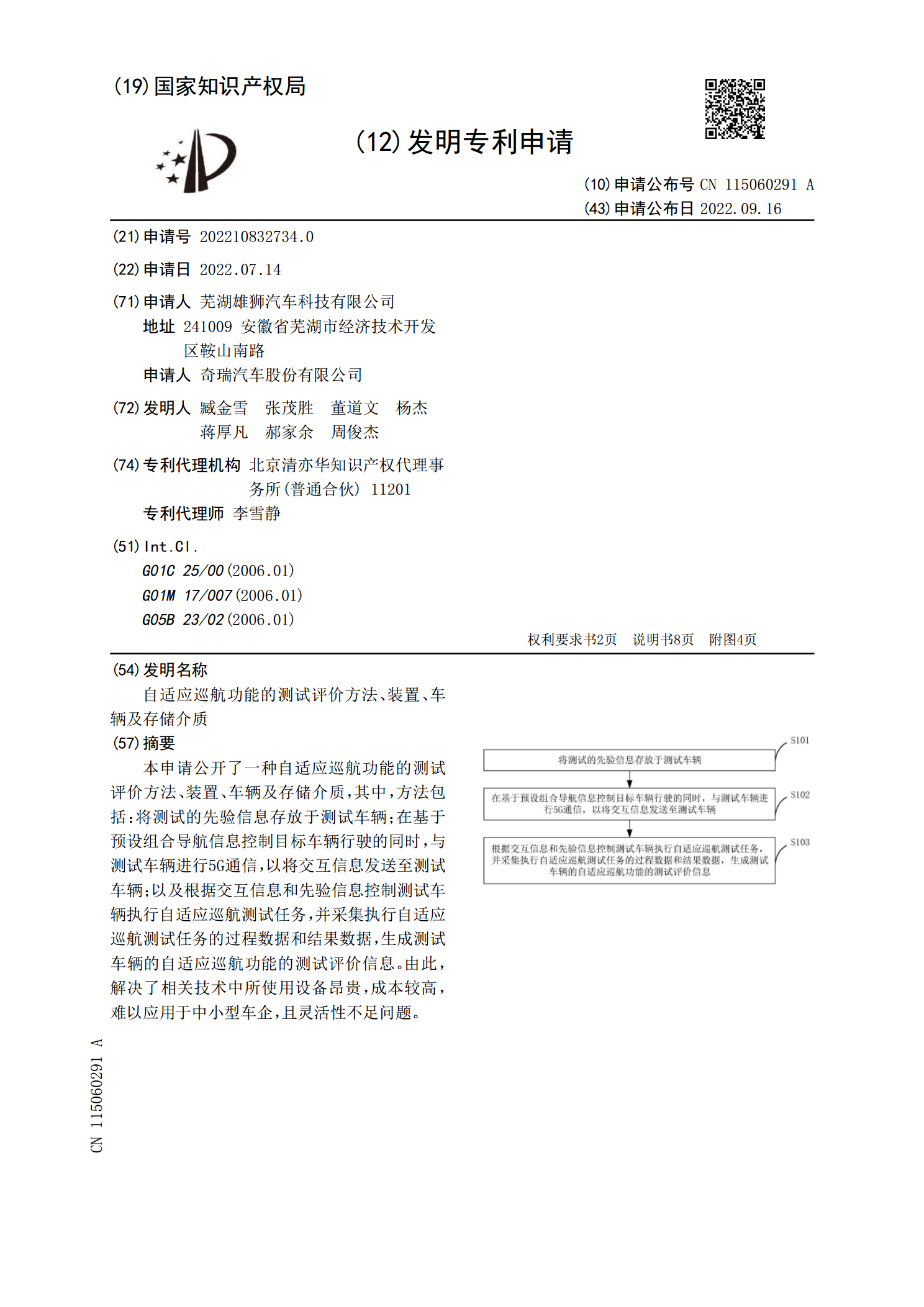
本申请公开了一种自适应巡航功能的测试评价方法、装置、车辆及存储介质,其中,方法包括:将测试的先验信息存放于测试车辆;在基于预设组合导航信息控制目标车辆行驶的同时,与测试车辆进行5G通信,以将交互信息发送至测试车辆;以及根据交互信息和先验信息控制测试车辆执行自适应巡航测试任务,并采集执行自适应巡航测试任务的过程数据和结果数据,生成测试车辆的自适应巡航功能的测试评价信息。由此,解决了相关技术中所使用设备昂贵,成本较高,难以应用于中小型车企,且灵活性不足问题。