
集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质.pdf

森林****io


1/9
2/9

3/9

4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质.pdf
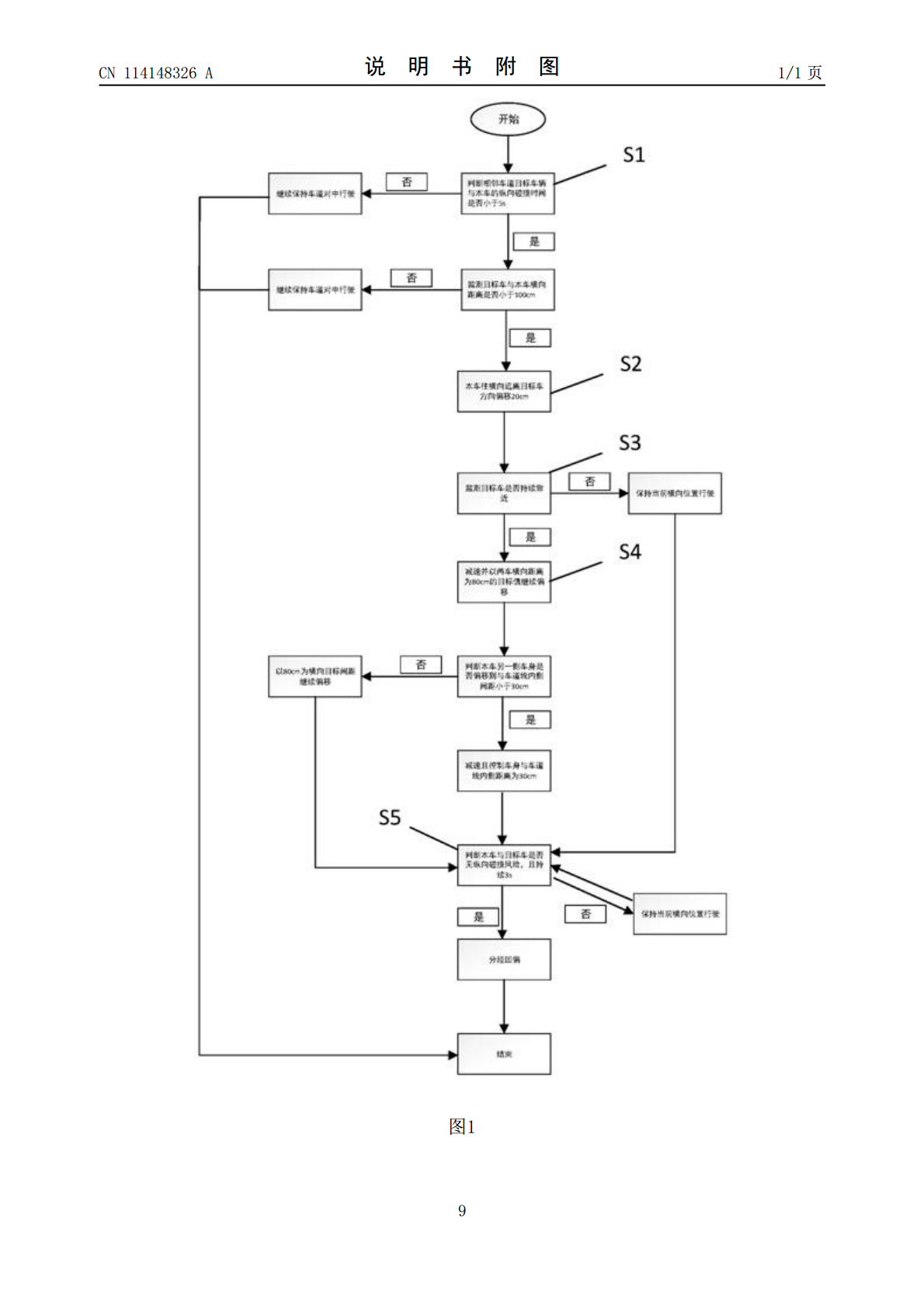
本发明公开的集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质,通过优化集成式自适应巡航系统的横向控制策略,以智慧偏移的方式,在合法合规的前提下,可有效降低行驶过程中的安全风险。该方法包括,判断邻道目标车辆与本车的碰撞时间和横向间距是否小于逻辑触发的安全距离阈值;若未小于安全距离阈值,则继续在当前车道对中行驶;若小于安全距离,往远离邻道目标车辆的方向横向偏移一定距离,同时,视两车横向距离情况,本车进行适当减速;当两车无碰撞风险后,本车分两段回偏,直至对中行驶。同时,在智慧偏移过程中通过向控制器发送
自适应巡航控制方法、系统、车辆和计算机可读存储介质.pdf
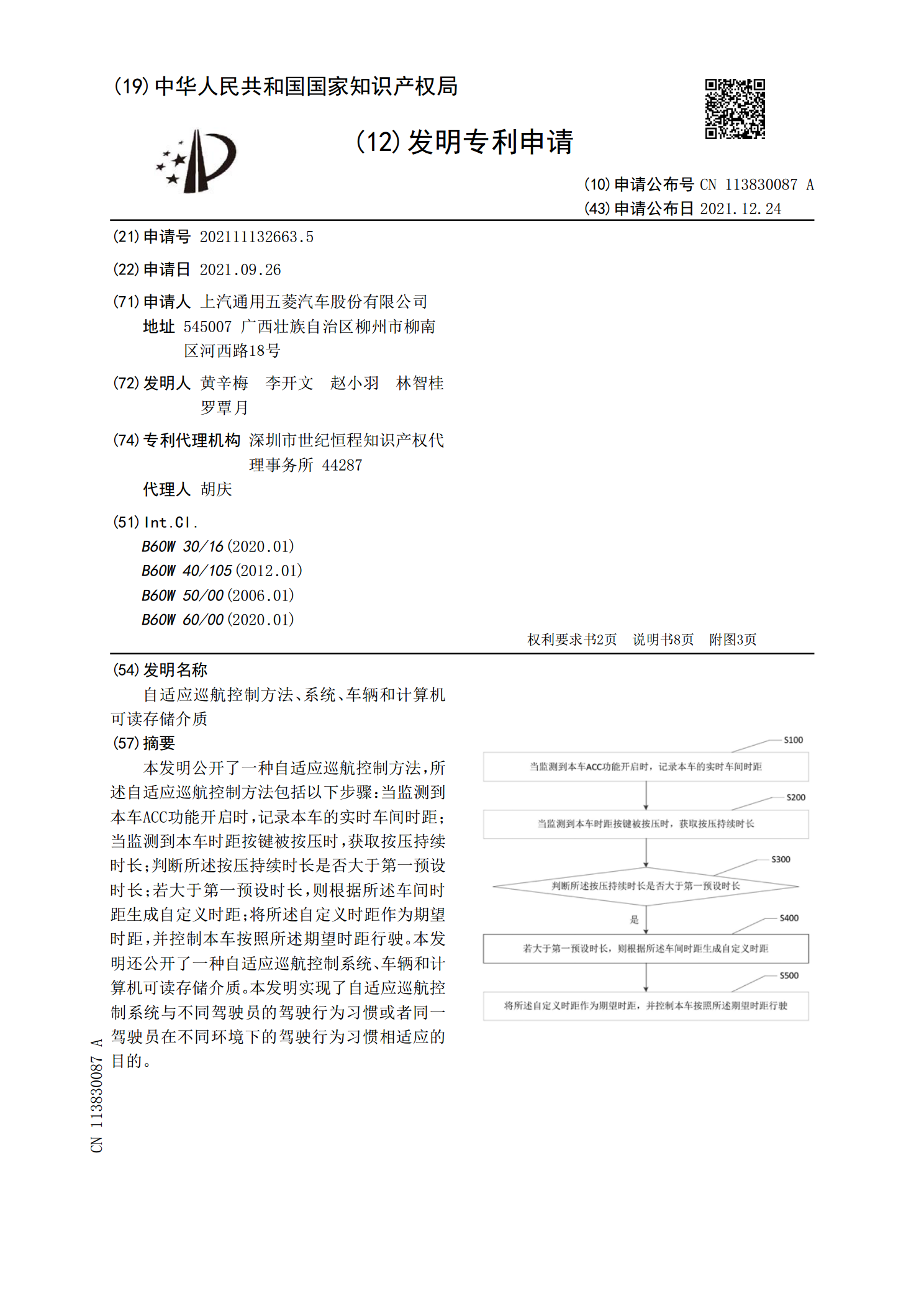
本发明公开了一种自适应巡航控制方法,所述自适应巡航控制方法包括以下步骤:当监测到本车ACC功能开启时,记录本车的实时车间时距;当监测到本车时距按键被按压时,获取按压持续时长;判断所述按压持续时长是否大于第一预设时长;若大于第一预设时长,则根据所述车间时距生成自定义时距;将所述自定义时距作为期望时距,并控制本车按照所述期望时距行驶。本发明还公开了一种自适应巡航控制系统、车辆和计算机可读存储介质。本发明实现了自适应巡航控制系统与不同驾驶员的驾驶行为习惯或者同一驾驶员在不同环境下的驾驶行为习惯相适应的目的。
自适应巡航控制系统、方法及车辆.pdf
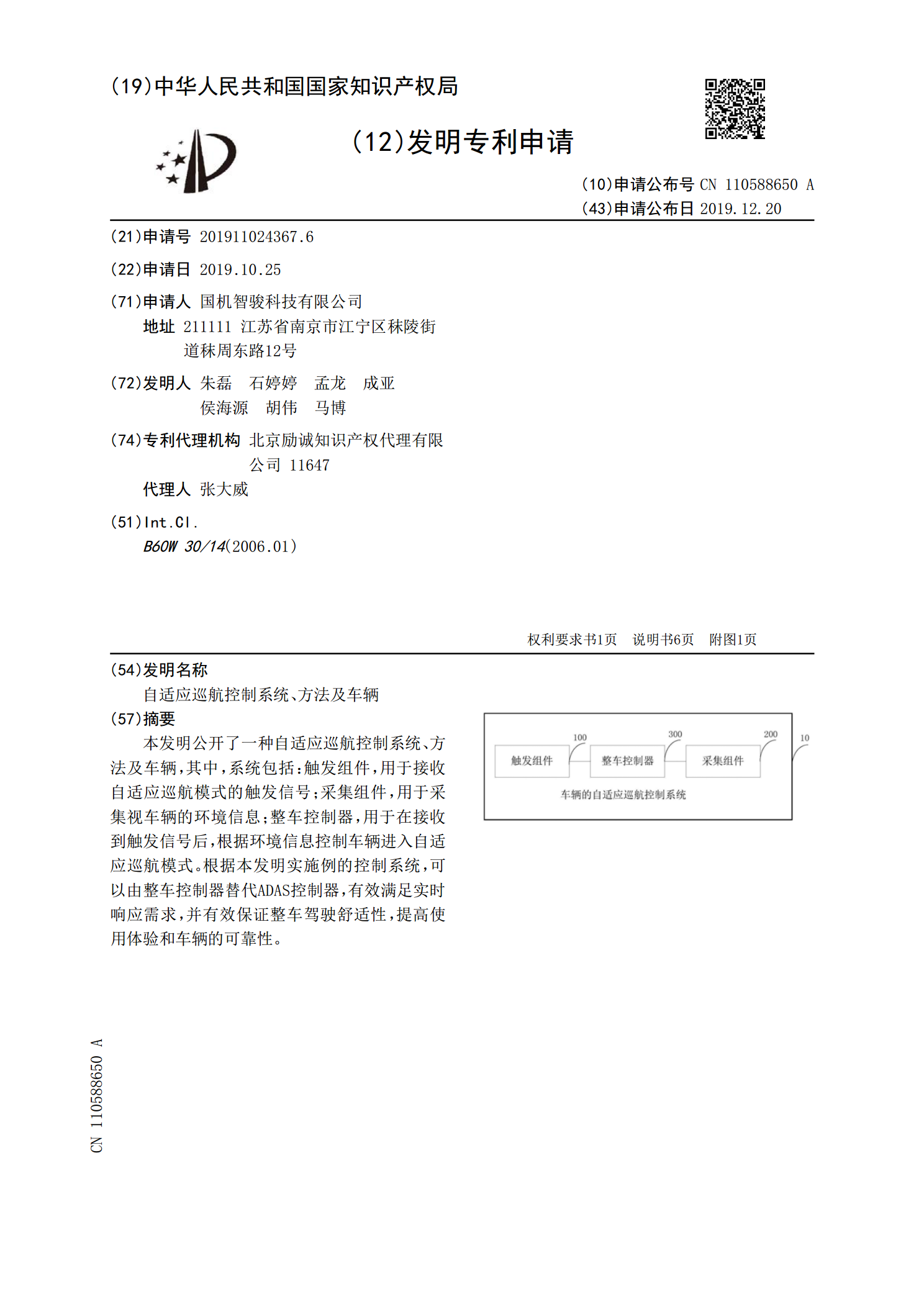
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。

车辆的巡航控制方法、装置、车辆及存储介质.pdf
本申请涉及车辆技术领域,特别涉及一种车辆的巡航控制方法、装置、车辆及存储介质,包括以下步骤:检测当前车辆的所属工况;若当前工况为巡航工况,由当前车辆的实际车速得到目标巡航车速,且基于实际车速和目标巡航车速的差值得到第一目标加速度;根据第一目标加速度计算当前车辆的第一驱动力矩或第一制动力矩,基于第一制动力矩控制制动系统进行能量回收电制动和液压制动,或者控制驱动电机执行第一驱动力矩。由此,可以有效避免车辆在驱动与能量回收切换时,电能与机械能相互转化时的效率损失,提升车辆行驶平顺性,降低整车能量消耗率,从而减少

车辆信息集成系统、方法和存储介质.pdf
本发明涉及一种车辆信息集成系统、方法和存储介质,其中该系统包括:信息采集子系统,该信息采集子系统包括至少一个多目标雷达、高清摄像设备以及数据识别设备,其中,数据识别设备配置成基于至少一个多目标雷达记录的数据筛选出有效数据;以及数据处理子系统,其配置成:根据有效数据计算一个或多个目标车辆的车速变化信息和行车轨迹;从有效的车辆照片中识别出车辆信息;汇总所有车辆信息并生成车辆数据库。通过该方法可以同时对特定范围内多个车辆的行驶过程进行实时测量并建立数据库。