
一种三维点云分割方法及装置.pdf

论文****轩吖

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三维点云分割方法及装置.pdf
本发明公开了一种三维点云分割方法及装置,以平行于平面区域的方向,采集三维点云;对三维点云进行预处理操作,获得预处理后的三维点云;根据预处理后三维点云中每个三维点的深度值大小,获得非平面区域的三维点云,获得初始凹陷区域三维点云;采用边缘搜索的方法对初始凹陷区域三维点云中所有三维点进行处理,获得多个三维点组成凹陷区域边缘;获得凹陷区域三维点云;本发明提供的分割方法通过滤波降采样等方法,去除了错误及冗余点云,精简三维点云中三维点的数量,有效提高了坑槽区域分割速度;利用深度阈值去除平面区域,保留非平面区域能够快速
一种点云分割方法及装置.pdf
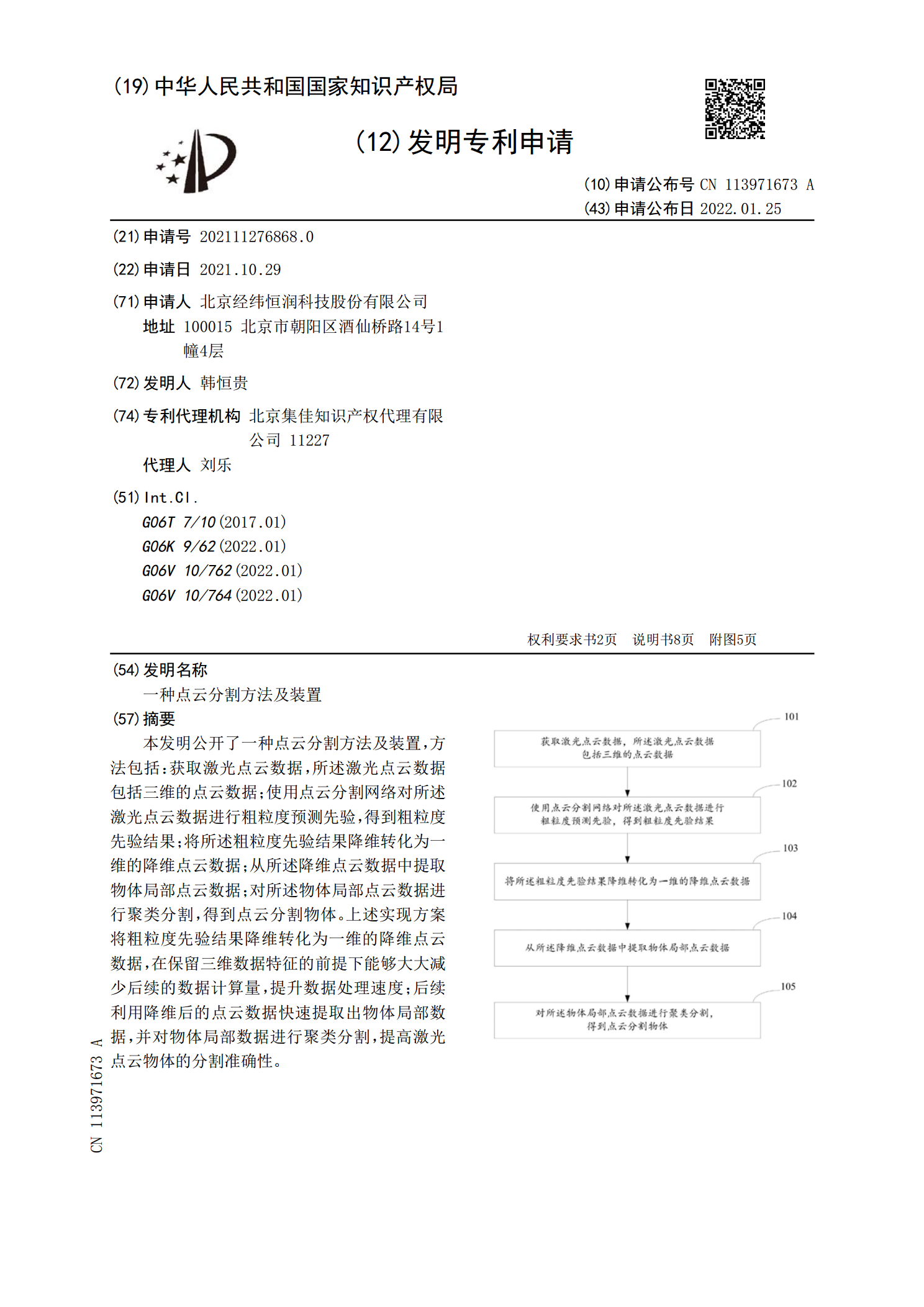
本发明公开了一种点云分割方法及装置,方法包括:获取激光点云数据,所述激光点云数据包括三维的点云数据;使用点云分割网络对所述激光点云数据进行粗粒度预测先验,得到粗粒度先验结果;将所述粗粒度先验结果降维转化为一维的降维点云数据;从所述降维点云数据中提取物体局部点云数据;对所述物体局部点云数据进行聚类分割,得到点云分割物体。上述实现方案将粗粒度先验结果降维转化为一维的降维点云数据,在保留三维数据特征的前提下能够大大减少后续的数据计算量,提升数据处理速度;后续利用降维后的点云数据快速提取出物体局部数据,并对物体局

一种三维点云模型的分割方法.pdf
本发明公开一种三维点云模型的分割方法,具体按照以下步骤实施:步骤1,对三维点云模型进行骨架点提取并分割;步骤2获取三维点云模型的外部特征点;步骤3,联合骨架点的分割点和外部特征点构建分割平面进行分割;步骤4:对经步骤2的外部特征点进行检查,若还有剩余,补充外部特征点再进行分割。本发明一种三维点云模型的分割方法,与传统分割方法相比,在充分保留符合视觉特征的前提下,能够对表面有微小凸面体的三维点云数据进行分割,得到更精准的结果,克服了原本传统分割方法细节特征分割不出来的问题,在点云分割领域有一定的价值。
一种三维点云语义分割的系统及方法.pdf
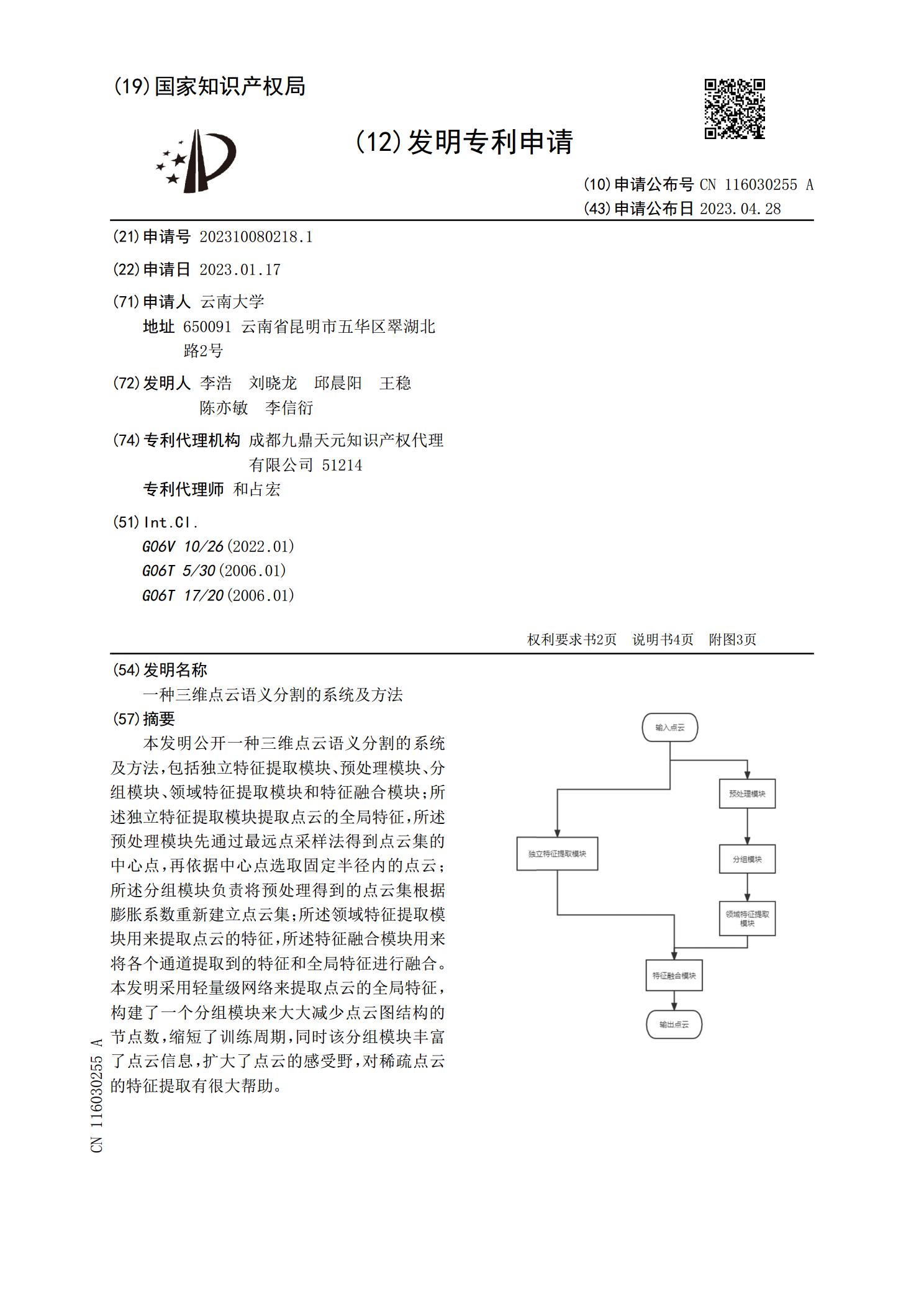
本发明公开一种三维点云语义分割的系统及方法,包括独立特征提取模块、预处理模块、分组模块、领域特征提取模块和特征融合模块;所述独立特征提取模块提取点云的全局特征,所述预处理模块先通过最远点采样法得到点云集的中心点,再依据中心点选取固定半径内的点云;所述分组模块负责将预处理得到的点云集根据膨胀系数重新建立点云集;所述领域特征提取模块用来提取点云的特征,所述特征融合模块用来将各个通道提取到的特征和全局特征进行融合。本发明采用轻量级网络来提取点云的全局特征,构建了一个分组模块来大大减少点云图结构的节点数,缩短了训

一种基于点云数据自动增强的三维点云语义分割方法.pdf
本发明公开了一种基于点云数据自动增强的三维点云语义分割方法。该发明可以进一步增强以PointNet++为代表的点云语义分割算法在不同应用场景下的泛化性能。以往点云语义分割算法通常存在两个问题:一是利用传统的数据增强方法;二是将数据增强与网络训练分为两个阶段。本发明提出的基于点云数据自动增强的三维点云语义分割方法,通过考虑样本的基本几何结构,为每个输入样本回归一个特定的增强函数,同时学习点云样本的形状变换和逐点位移,并联合优化增强函数和优化器,解决网络中输入样本多样性不足的问题,增强网络的泛化能力。