
一种点云分割方法及装置.pdf

梅雪****67


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种点云分割方法及装置.pdf
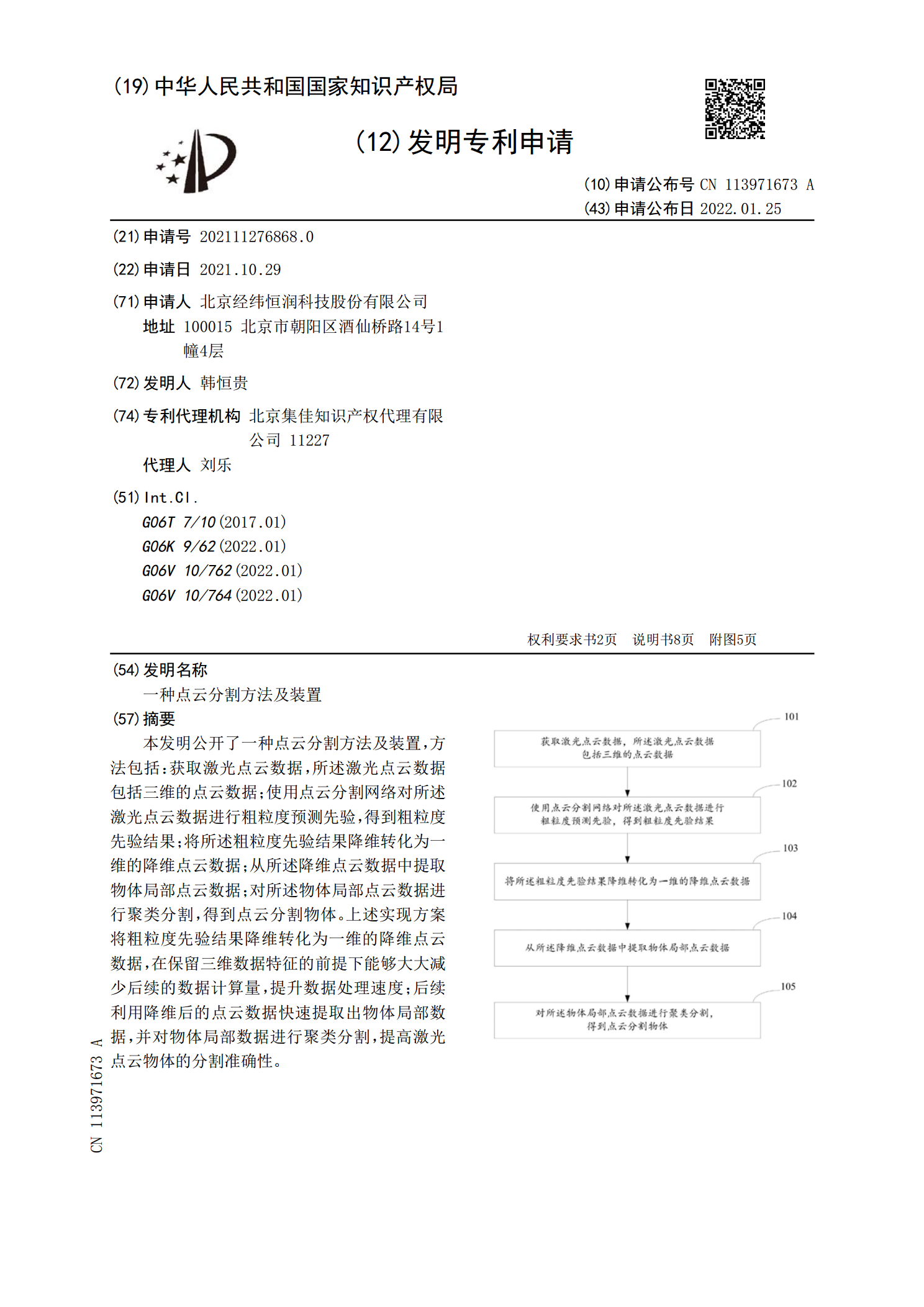
本发明公开了一种点云分割方法及装置,方法包括:获取激光点云数据,所述激光点云数据包括三维的点云数据;使用点云分割网络对所述激光点云数据进行粗粒度预测先验,得到粗粒度先验结果;将所述粗粒度先验结果降维转化为一维的降维点云数据;从所述降维点云数据中提取物体局部点云数据;对所述物体局部点云数据进行聚类分割,得到点云分割物体。上述实现方案将粗粒度先验结果降维转化为一维的降维点云数据,在保留三维数据特征的前提下能够大大减少后续的数据计算量,提升数据处理速度;后续利用降维后的点云数据快速提取出物体局部数据,并对物体局

一种三维点云分割方法及装置.pdf
本发明公开了一种三维点云分割方法及装置,以平行于平面区域的方向,采集三维点云;对三维点云进行预处理操作,获得预处理后的三维点云;根据预处理后三维点云中每个三维点的深度值大小,获得非平面区域的三维点云,获得初始凹陷区域三维点云;采用边缘搜索的方法对初始凹陷区域三维点云中所有三维点进行处理,获得多个三维点组成凹陷区域边缘;获得凹陷区域三维点云;本发明提供的分割方法通过滤波降采样等方法,去除了错误及冗余点云,精简三维点云中三维点的数量,有效提高了坑槽区域分割速度;利用深度阈值去除平面区域,保留非平面区域能够快速

铁路场景下的点云分割方法及装置.pdf
本发明公开了一种铁路场景下的点云分割方法及装置,其中该方法包括:获取铁路场景下的点云数据集,点云数据集包括在不同的铁路线路上采集的多个点云数据样本;根据预设下采样次数,对每一点云数据样本进行多次下采样,对每次下采样后的点云数据样本进行局部特征融合,得到每次下采样后的点云数据样本的局部融合特征;通过多次上采样,依次将每次下采样后的点云数据样本的局部融合特征,映射到下采样前的点云数据样本上,将每次下采样后的点云数据样本的局部融合特征与下采样前该点云数据样本的多维特征进行聚合,生成每一点云数据样本更新的多维特征
一种点云分割方法、装置、电子设备及存储介质.pdf
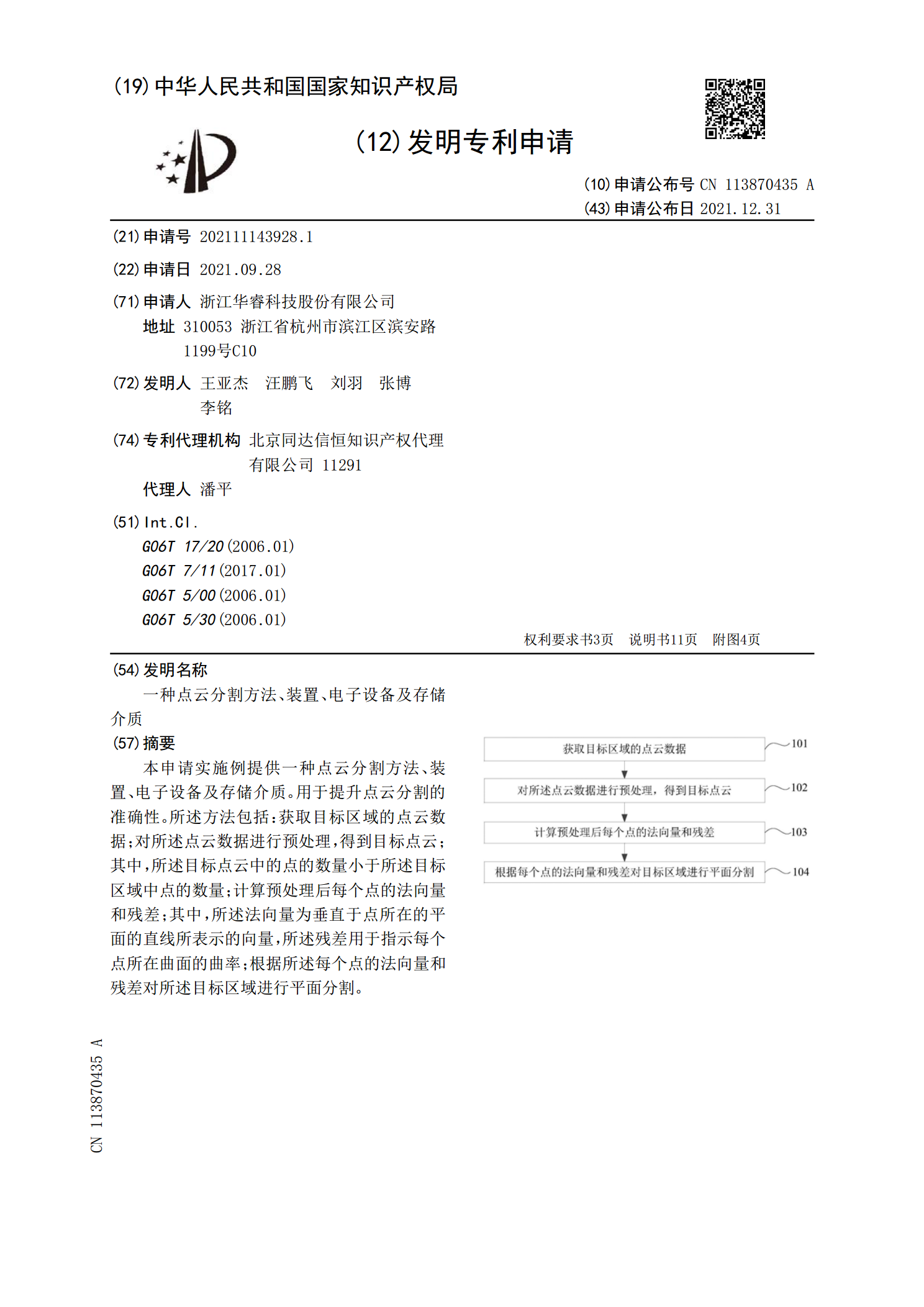
本申请实施例提供一种点云分割方法、装置、电子设备及存储介质。用于提升点云分割的准确性。所述方法包括:获取目标区域的点云数据;对所述点云数据进行预处理,得到目标点云;其中,所述目标点云中的点的数量小于所述目标区域中点的数量;计算预处理后每个点的法向量和残差;其中,所述法向量为垂直于点所在的平面的直线所表示的向量,所述残差用于指示每个点所在曲面的曲率;根据所述每个点的法向量和残差对所述目标区域进行平面分割。
一种点云分割方法、装置及计算机可读存储介质.pdf
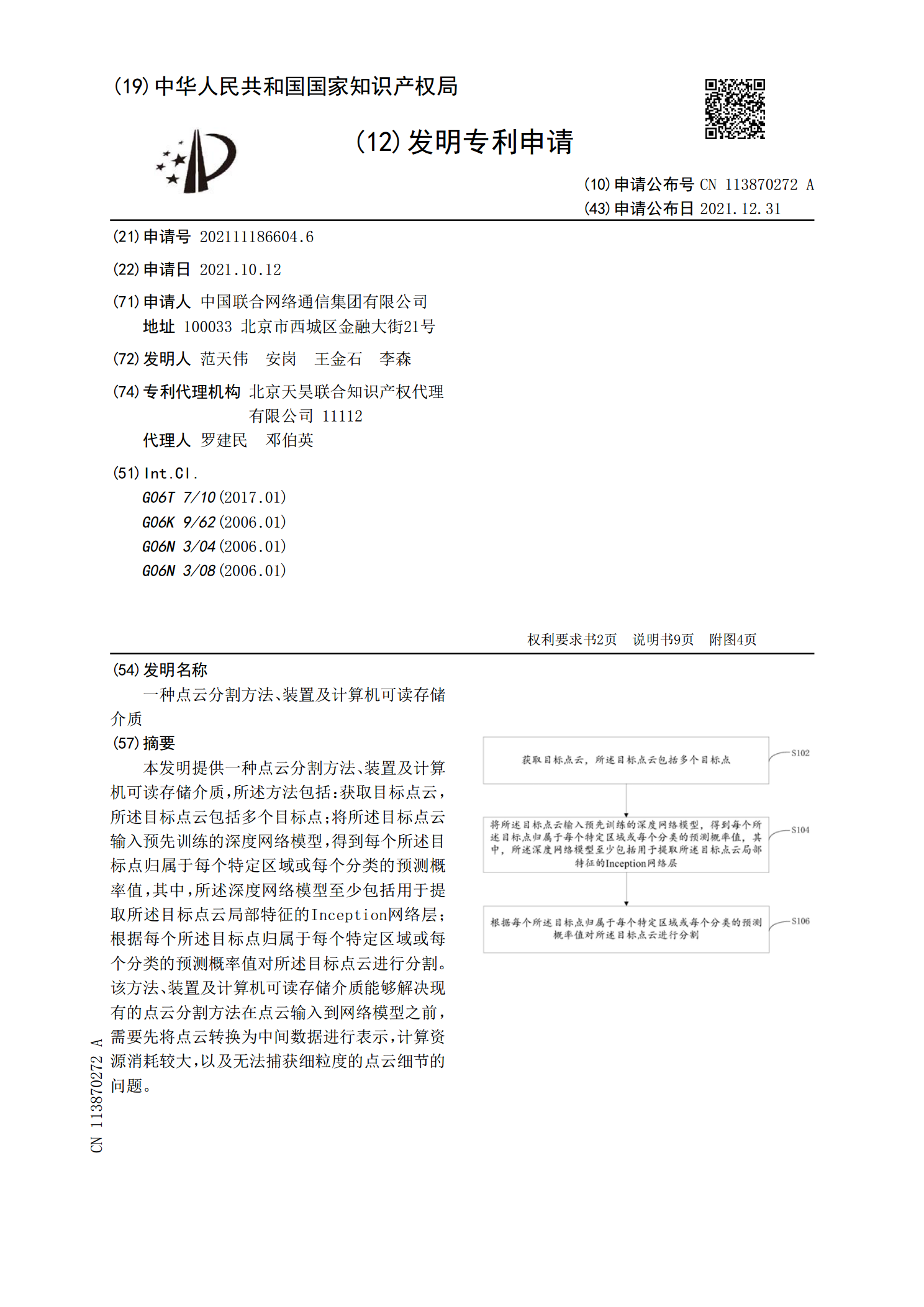
本发明提供一种点云分割方法、装置及计算机可读存储介质,所述方法包括:获取目标点云,所述目标点云包括多个目标点;将所述目标点云输入预先训练的深度网络模型,得到每个所述目标点归属于每个特定区域或每个分类的预测概率值,其中,所述深度网络模型至少包括用于提取所述目标点云局部特征的Inception网络层;根据每个所述目标点归属于每个特定区域或每个分类的预测概率值对所述目标点云进行分割。该方法、装置及计算机可读存储介质能够解决现有的点云分割方法在点云输入到网络模型之前,需要先将点云转换为中间数据进行表示,计算资源消