
清洁机器人控制方法、清洁机器人及计算机可读存储介质.pdf

曦晨****22

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

清洁机器人控制方法、清洁机器人及计算机可读存储介质.pdf
本申请实施例提供一种清洁机器人控制方法、清洁机器人及计算机可读存储介质。所述清洁机器人包括机器本体、运动装置、清扫装置和收集装置,所述清洁机器人控制方法包括:响应于清洁机器人执行残留垃圾清扫操作,控制所述机器本体执行旋转动作,且控制所述清扫装置工作以将所述机器本体底部的垃圾收集至所述收集装置内。通过本申请提供的清洁机器人控制方法可以将清洁机器人底部残留的垃圾清理干净,从而避免清洁机器人底部残留的垃圾对空气造成污染。
清洁方法、清洁机器人及计算机可读存储介质.pdf
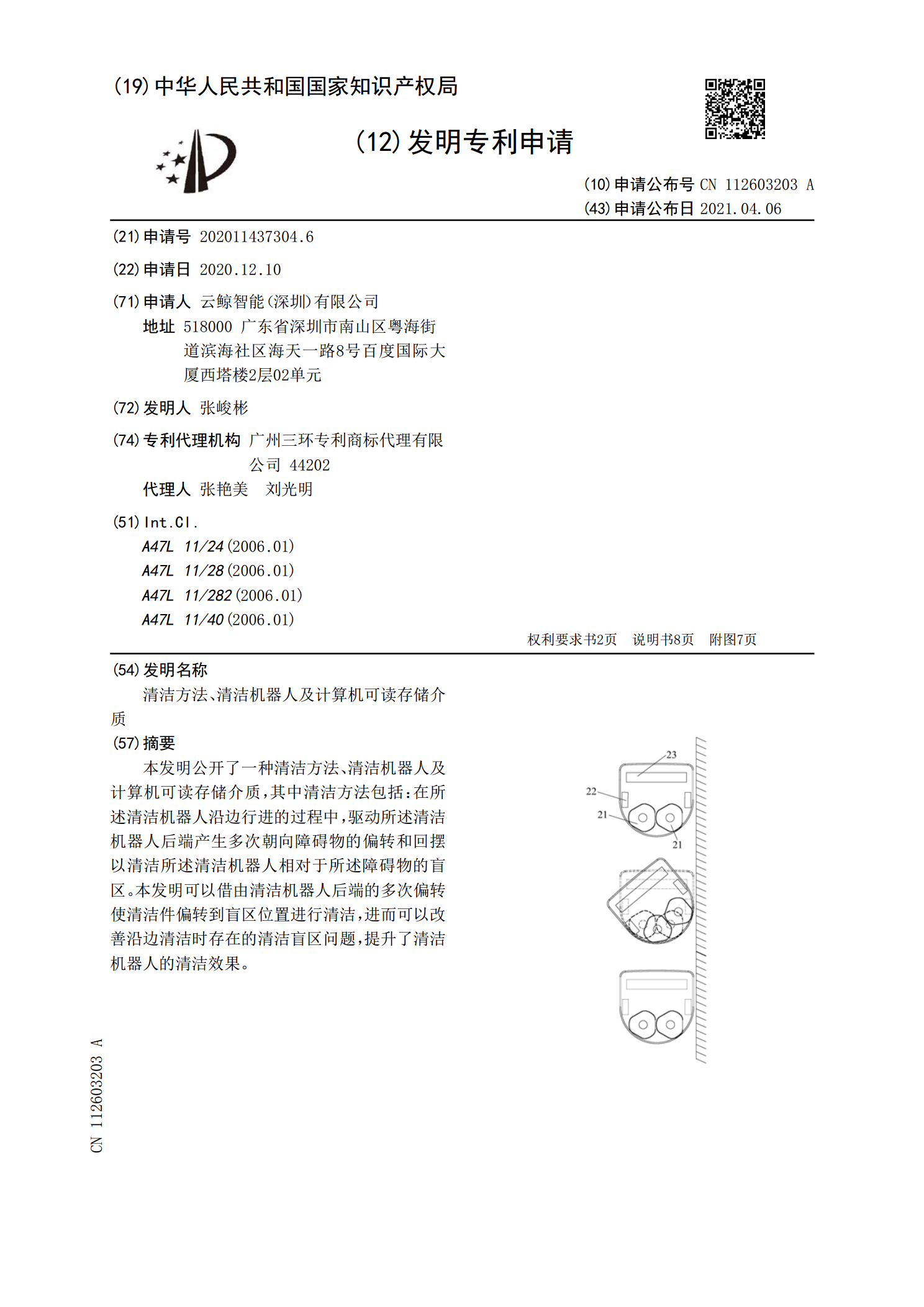
本发明公开了一种清洁方法、清洁机器人及计算机可读存储介质,其中清洁方法包括:在所述清洁机器人沿边行进的过程中,驱动所述清洁机器人后端产生多次朝向障碍物的偏转和回摆以清洁所述清洁机器人相对于所述障碍物的盲区。本发明可以借由清洁机器人后端的多次偏转使清洁件偏转到盲区位置进行清洁,进而可以改善沿边清洁时存在的清洁盲区问题,提升了清洁机器人的清洁效果。

水箱供水方法、清洁机器人及计算机可读存储介质.pdf
本发明实施例涉及吸尘器技术领域,公开了一种水箱供水方法、清洁机器人及计算机可读存储介质。本发明中,水箱供水方法包括:在清洁机器人进入工作模式时,控制水箱进入大量供水模式;在大量供水模式的持续时长等于第一时间阈值时,控制水箱切换为过渡供水模式;在过渡供水模式的持续时长等于第二时间阈值时,控制水箱切换为定量供水模式。本发明实施方式提供的水箱供水方法、清洁机器人及计算机可读存储介质,有效解决了清洁机器人在使用过程中,清洁抹布被过度浸湿,导致地面残留积水,或者没有完全浸湿影响擦地效果的问题。
清洁机器人的控制方法、清洁机器人及存储介质.pdf
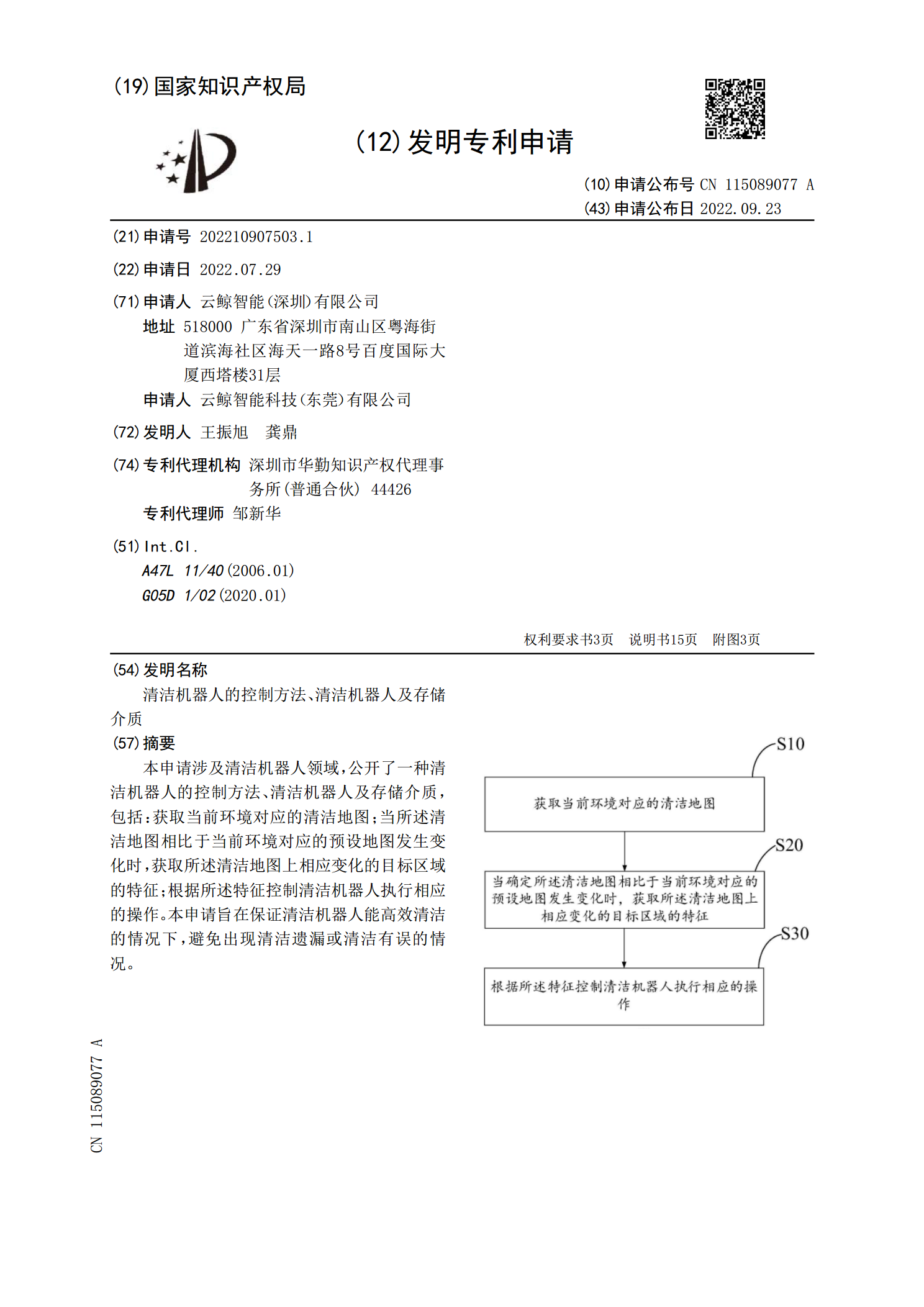
本申请涉及清洁机器人领域,公开了一种清洁机器人的控制方法、清洁机器人及存储介质,包括:获取当前环境对应的清洁地图;当所述清洁地图相比于当前环境对应的预设地图发生变化时,获取所述清洁地图上相应变化的目标区域的特征;根据所述特征控制清洁机器人执行相应的操作。本申请旨在保证清洁机器人能高效清洁的情况下,避免出现清洁遗漏或清洁有误的情况。
清洁机器人的控制方法、装置、清洁机器人及存储介质.pdf
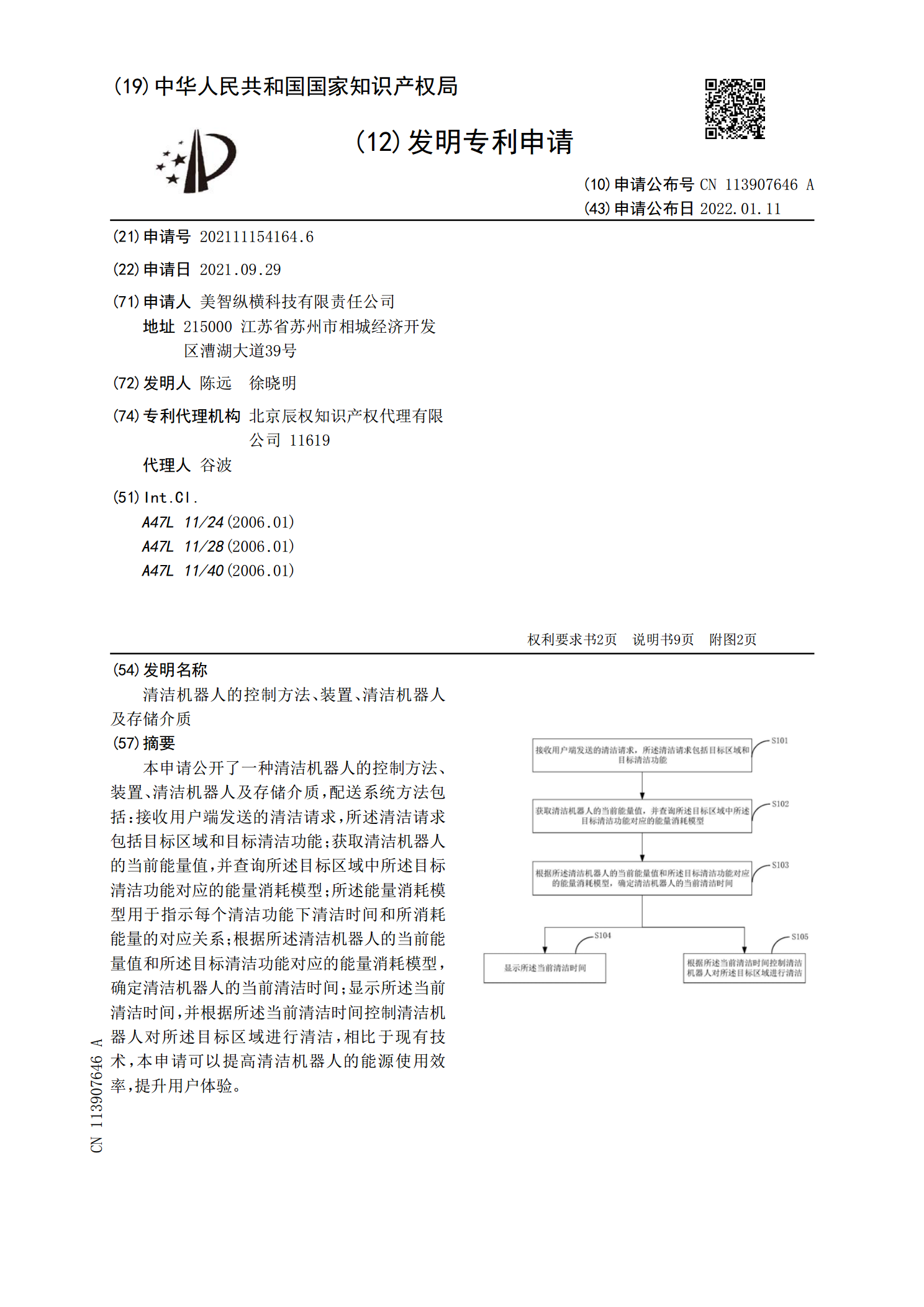
本申请公开了一种清洁机器人的控制方法、装置、清洁机器人及存储介质,配送系统方法包括:接收用户端发送的清洁请求,所述清洁请求包括目标区域和目标清洁功能;获取清洁机器人的当前能量值,并查询所述目标区域中所述目标清洁功能对应的能量消耗模型;所述能量消耗模型用于指示每个清洁功能下清洁时间和所消耗能量的对应关系;根据所述清洁机器人的当前能量值和所述目标清洁功能对应的能量消耗模型,确定清洁机器人的当前清洁时间;显示所述当前清洁时间,并根据所述当前清洁时间控制清洁机器人对所述目标区域进行清洁,相比于现有技术,本申请可以