
清洁机器人的控制方法、清洁机器人及存储介质.pdf

一条****ee


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁机器人的控制方法、清洁机器人及存储介质.pdf
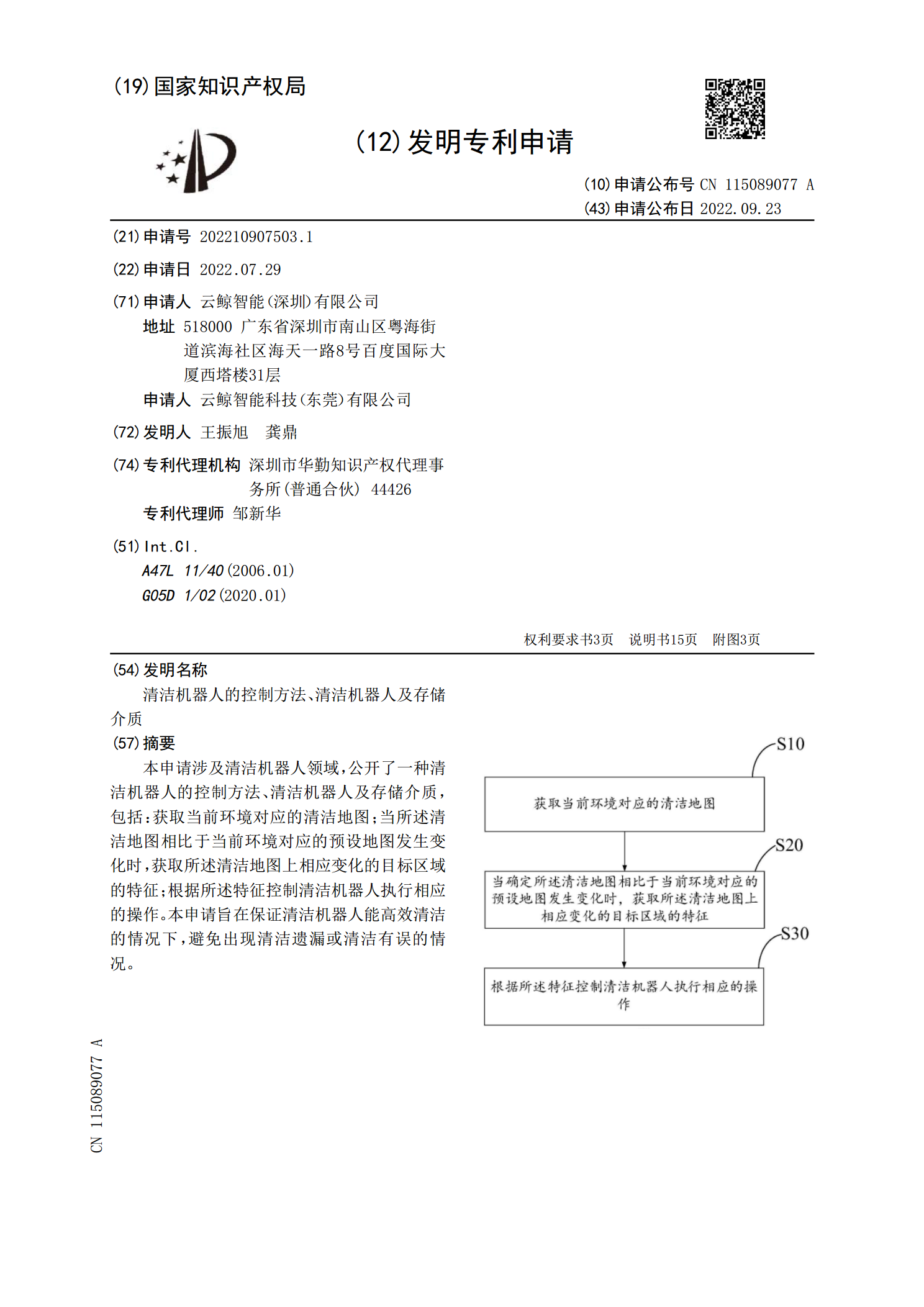
本申请涉及清洁机器人领域,公开了一种清洁机器人的控制方法、清洁机器人及存储介质,包括:获取当前环境对应的清洁地图;当所述清洁地图相比于当前环境对应的预设地图发生变化时,获取所述清洁地图上相应变化的目标区域的特征;根据所述特征控制清洁机器人执行相应的操作。本申请旨在保证清洁机器人能高效清洁的情况下,避免出现清洁遗漏或清洁有误的情况。

清洁机器人控制方法、清洁机器人及计算机可读存储介质.pdf
本申请实施例提供一种清洁机器人控制方法、清洁机器人及计算机可读存储介质。所述清洁机器人包括机器本体、运动装置、清扫装置和收集装置,所述清洁机器人控制方法包括:响应于清洁机器人执行残留垃圾清扫操作,控制所述机器本体执行旋转动作,且控制所述清扫装置工作以将所述机器本体底部的垃圾收集至所述收集装置内。通过本申请提供的清洁机器人控制方法可以将清洁机器人底部残留的垃圾清理干净,从而避免清洁机器人底部残留的垃圾对空气造成污染。
清洁机器人的控制方法、装置、清洁机器人及存储介质.pdf
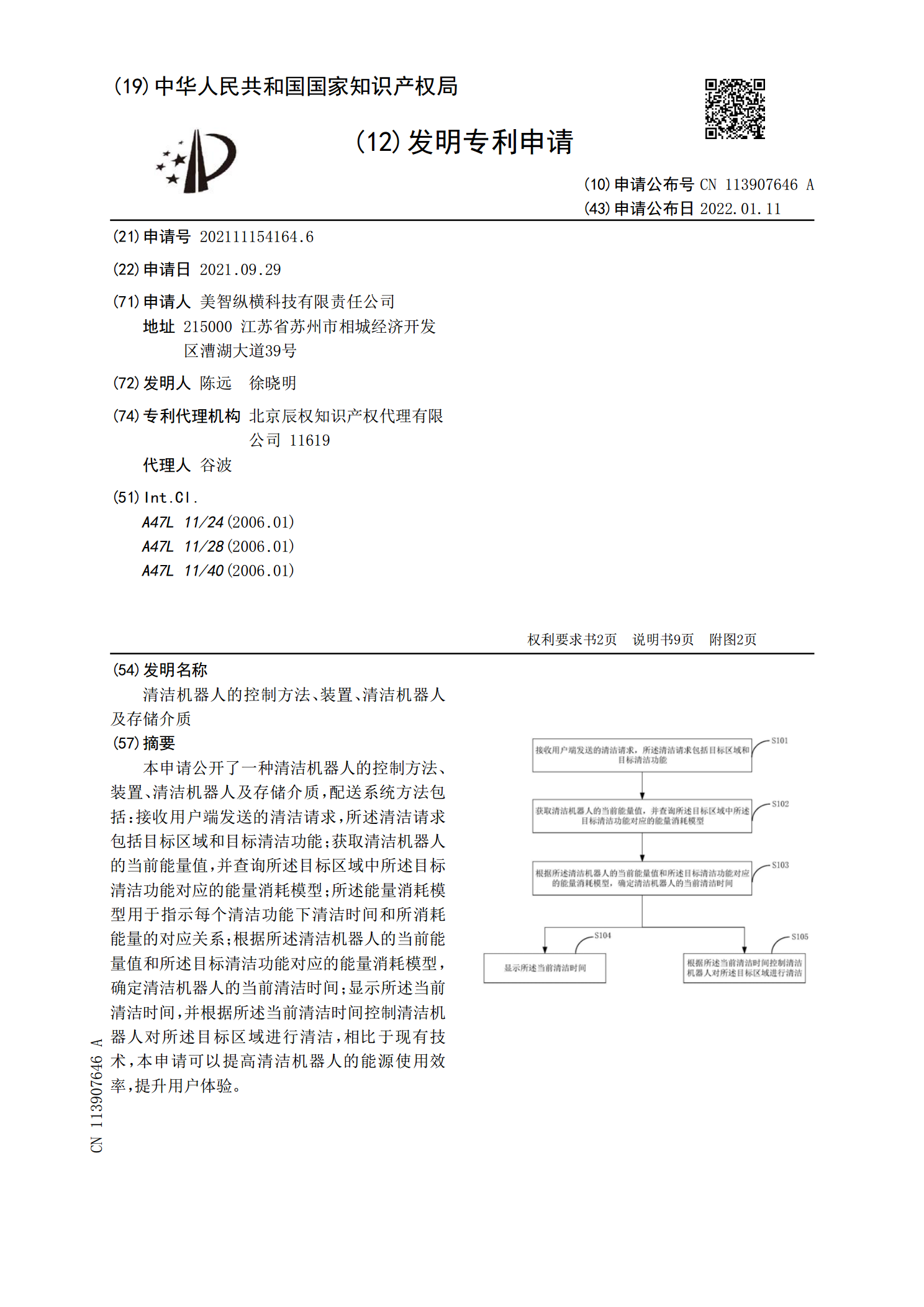
本申请公开了一种清洁机器人的控制方法、装置、清洁机器人及存储介质,配送系统方法包括:接收用户端发送的清洁请求,所述清洁请求包括目标区域和目标清洁功能;获取清洁机器人的当前能量值,并查询所述目标区域中所述目标清洁功能对应的能量消耗模型;所述能量消耗模型用于指示每个清洁功能下清洁时间和所消耗能量的对应关系;根据所述清洁机器人的当前能量值和所述目标清洁功能对应的能量消耗模型,确定清洁机器人的当前清洁时间;显示所述当前清洁时间,并根据所述当前清洁时间控制清洁机器人对所述目标区域进行清洁,相比于现有技术,本申请可以
清洁机器人的清洁控制方法、清洁机器人以及存储介质.pdf
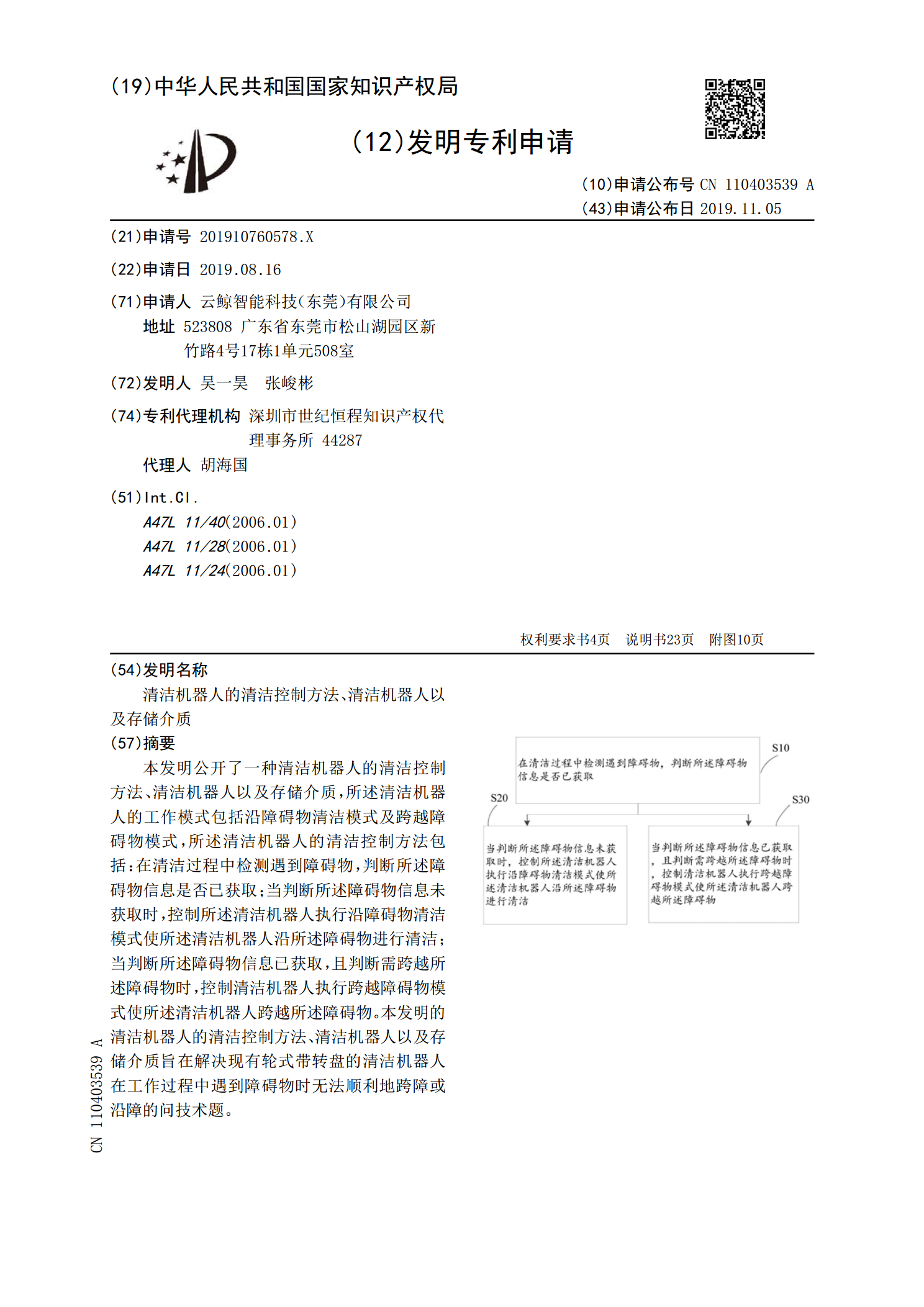
本发明公开了一种清洁机器人的清洁控制方法、清洁机器人以及存储介质,所述清洁机器人的工作模式包括沿障碍物清洁模式及跨越障碍物模式,所述清洁机器人的清洁控制方法包括:在清洁过程中检测遇到障碍物,判断所述障碍物信息是否已获取;当判断所述障碍物信息未获取时,控制所述清洁机器人执行沿障碍物清洁模式使所述清洁机器人沿所述障碍物进行清洁;当判断所述障碍物信息已获取,且判断需跨越所述障碍物时,控制清洁机器人执行跨越障碍物模式使所述清洁机器人跨越所述障碍物。本发明的清洁机器人的清洁控制方法、清洁机器人以及存储介质旨在解决现

清洁机器人的语音控制方法、云服务器、清洁机器人及其存储介质.pdf
本发明涉及一种清洁机器人的语音控制方法,该方法包括:接收语音交互终端发送的语音信息;解析语音信息,生成机器人控制指令;将机器人控制指令发送至清洁机器人,以使清洁机器人按照机器人控制指令执行相应的清洁任务。上述方法能够更加灵敏地调度清洁机器人。