
基于EPI的光场图像特征点检测方法.pdf

努力****幻翠


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于EPI的光场图像特征点检测方法.pdf
本发明公开一种基于EPI的光场图像特征点检测方法,具体按照以下步骤实施:步骤1,输入光场图像做预处理,子孔径图像矩阵;步骤2,对子孔径图像矩阵中中间行的子孔径图像做处理,提取中间行的子孔径图像中每一行像素的EPI图像作为EPI图像集合;步骤3,对EPI图像集合中每个EPI图像进行SIFT特征点检测,得到特征点集合a;步骤4,保留特征点集合a中在每个SIFT尺度下都存在的特征点,记为特征点集合b;步骤5,对特征点集合b中的特征点进行指标量化排序,根据不同光场图像的情况,保留排序前40%~60%的特征点作为最

基于视点图像与EPI特征融合的光场超分辨率.docx
基于视点图像与EPI特征融合的光场超分辨率基于视点图像与EPI特征融合的光场超分辨率摘要:光场图像是一种包含了3D信息的多维图像,其具有丰富的视点信息和深度信息。然而,由于其存储和处理的复杂性,光场图像的分辨率常常受到限制。为了解决这个问题,本文提出了一种基于视点图像与EPI(EpipolarPlaneImage)特征融合的光场超分辨率方法。该方法将光场图像进行分割,并提取视点图像和EPI特征,然后通过融合这两种特征来提高光场图像的分辨率。实验结果表明,该方法在保持光场图像几何结构的同时,有效地提高了图像

基于EPI的光场拼接装置及方法.pdf
本发明提供了一种基于EPI的光场拼接装置及方法,将光场相机固定在电控平移台的台面上,且光场相机的镜头光轴与电控平移台导轨方向垂直;将电控平移台固定在光学平台的底板上,使电控平移台的导轨和光学平台底板平面平行或垂直;在计算机终端对运动控制器发出指令,控制光场相机在电控平移台导轨上平移;相机在平移运动的过程中采集光场,相邻光场经过注册和插值处理,渲染出比360°视场范围更大的光场。
基于丰富特征的光场图像质量评价方法.pdf
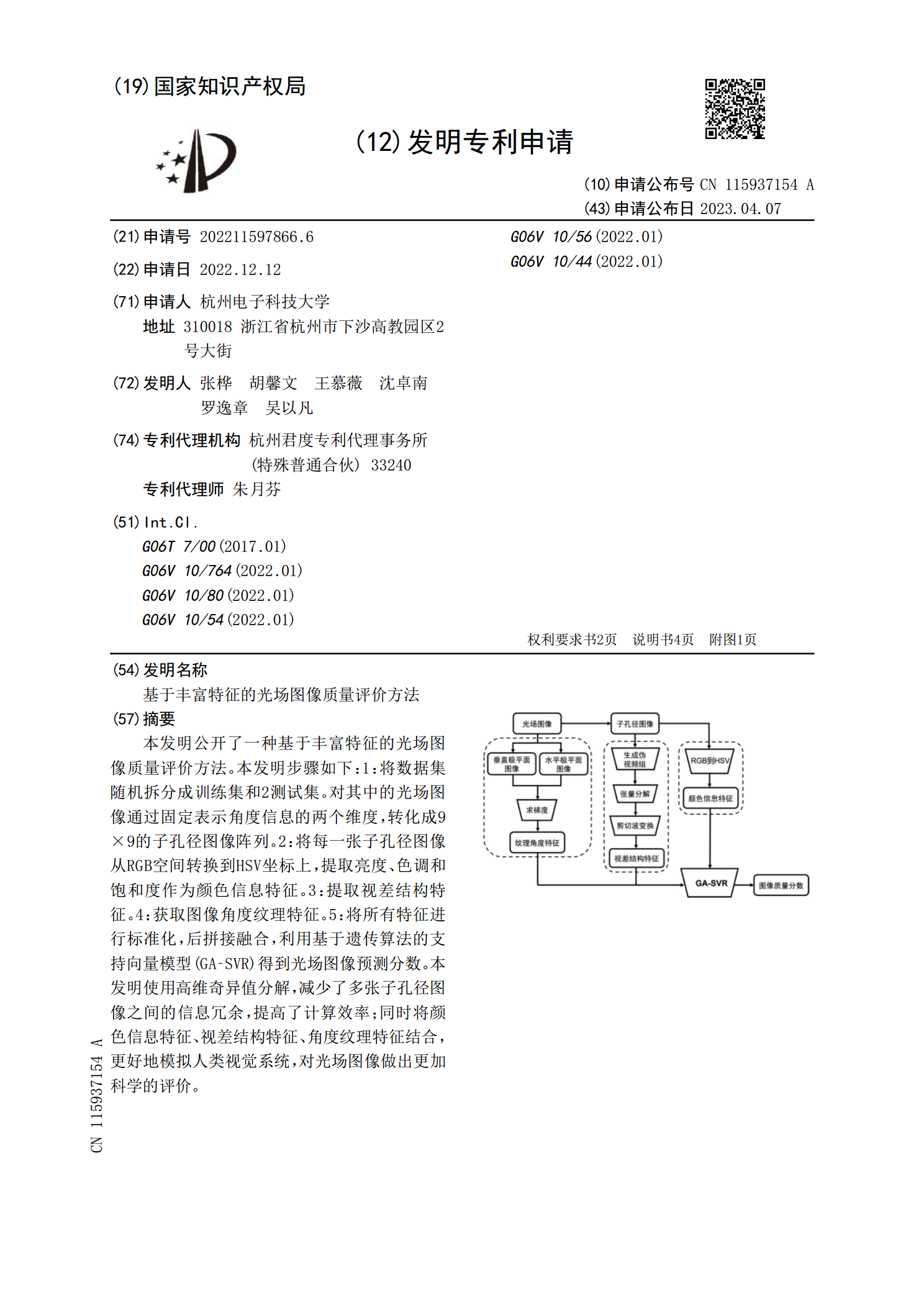
本发明公开了一种基于丰富特征的光场图像质量评价方法。本发明步骤如下:1:将数据集随机拆分成训练集和2测试集。对其中的光场图像通过固定表示角度信息的两个维度,转化成9×9的子孔径图像阵列。2:将每一张子孔径图像从RGB空间转换到HSV坐标上,提取亮度、色调和饱和度作为颜色信息特征。3:提取视差结构特征。4:获取图像角度纹理特征。5:将所有特征进行标准化,后拼接融合,利用基于遗传算法的支持向量模型(GA‑SVR)得到光场图像预测分数。本发明使用高维奇异值分解,减少了多张子孔径图像之间的信息冗余,提高了计算效率

一种基于多尺度Harris的光场图像特征点检测方法.pdf
本发明公开了一种基于多尺度Harris的光场图像特征检测方法,具体过程为:将光场原始图像参数文件读入MATLAB,解码并处理为有效四维光场矩阵;将角度分辨率[u,v]中的最大值作为斜率列表的长度n,得到斜率列表,斜率列表中每个斜率进行重聚焦,得到斜率对应的焦点堆栈图像;对每一个焦点堆栈图像进行多尺度Harris角点检测;对当前角点堆栈的每一个尺度检测的角点进行非极大值抑制,减少多响应的影响。再对候选角点进行多尺度判断,若在多个尺度出现,则保留;否则删除;最终保留的角点即为光场图像的特征点;采用光场图像中的