
基于丰富特征的光场图像质量评价方法.pdf

一条****杉淑

1/8
2/8

3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于丰富特征的光场图像质量评价方法.pdf
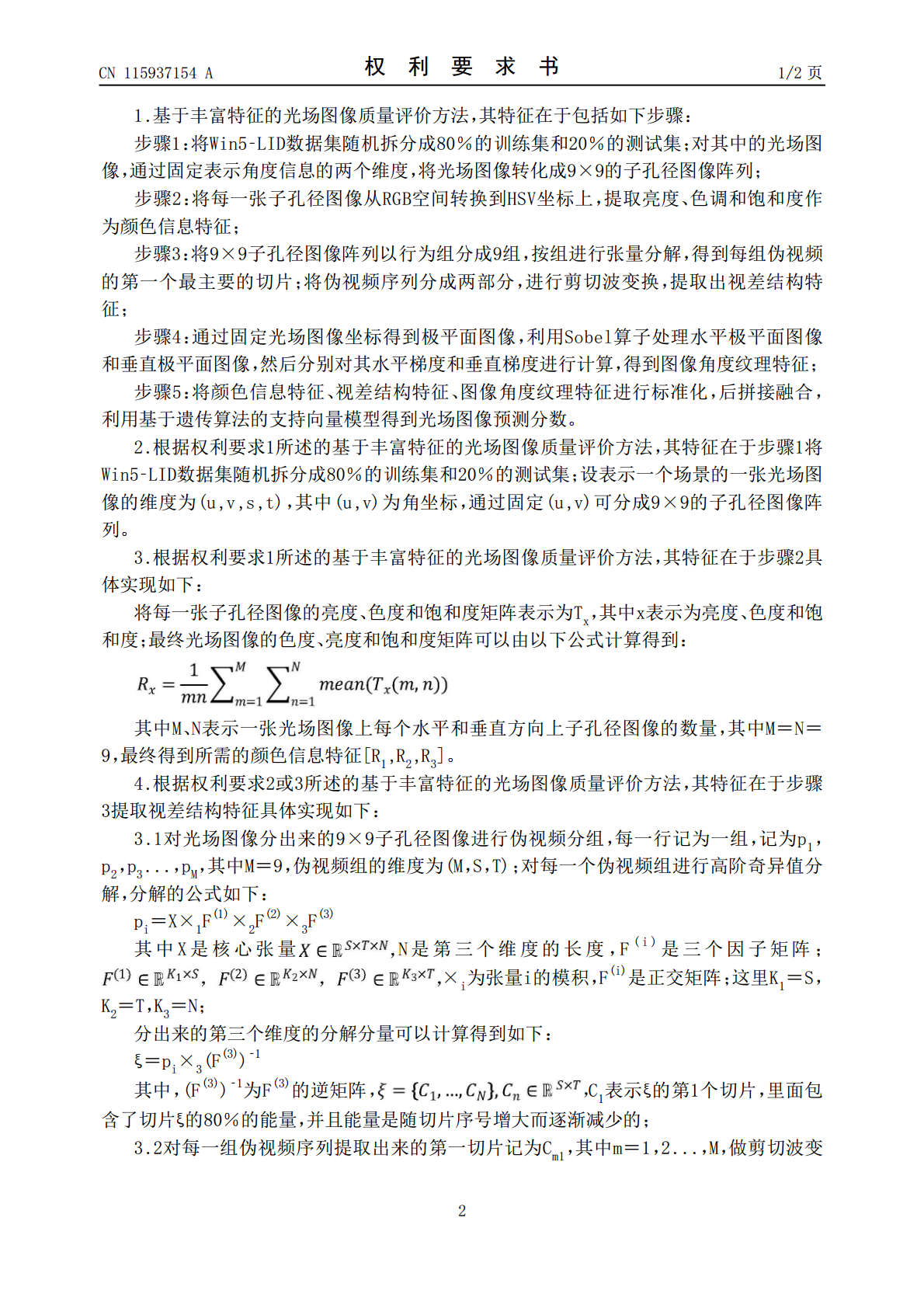
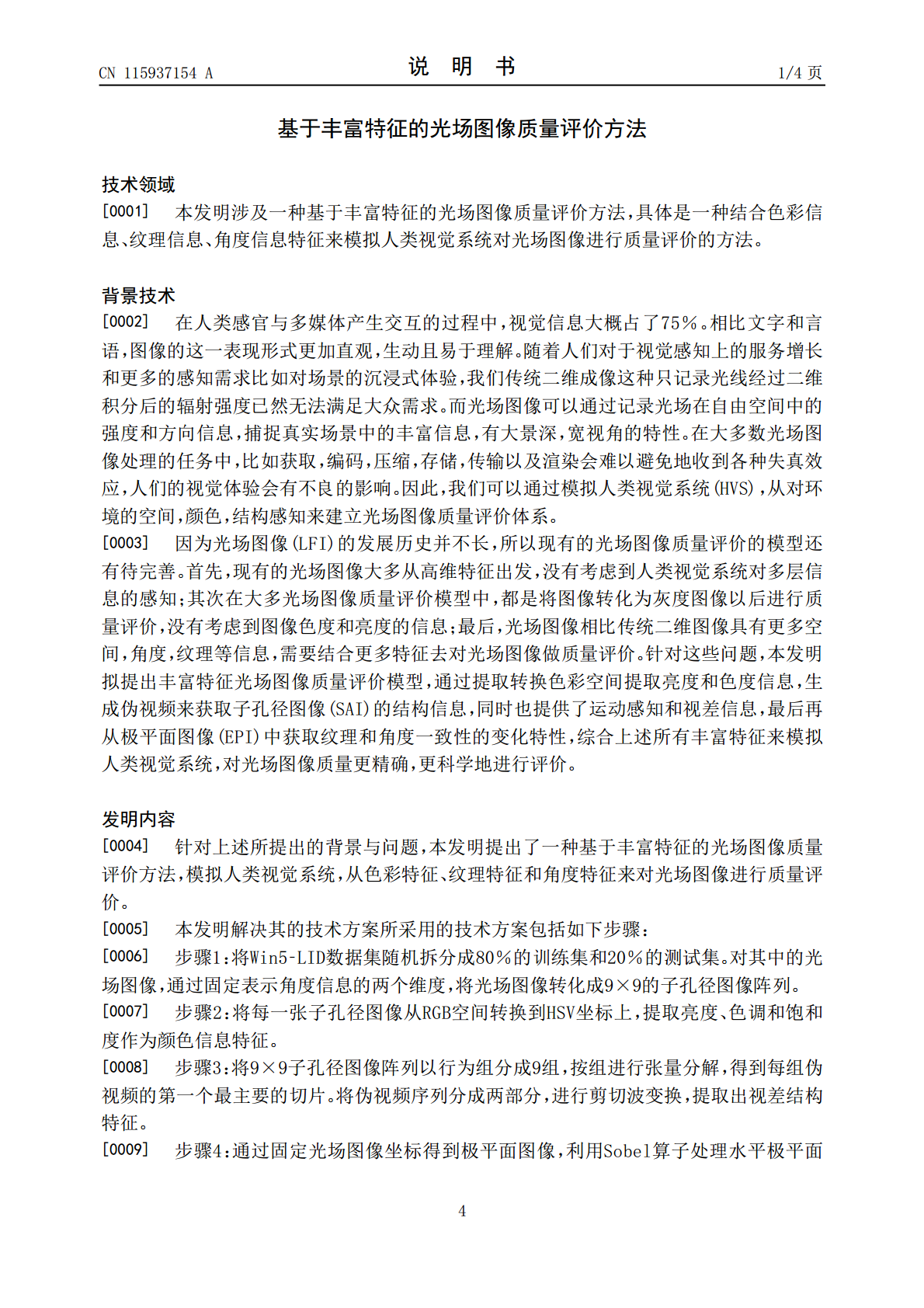
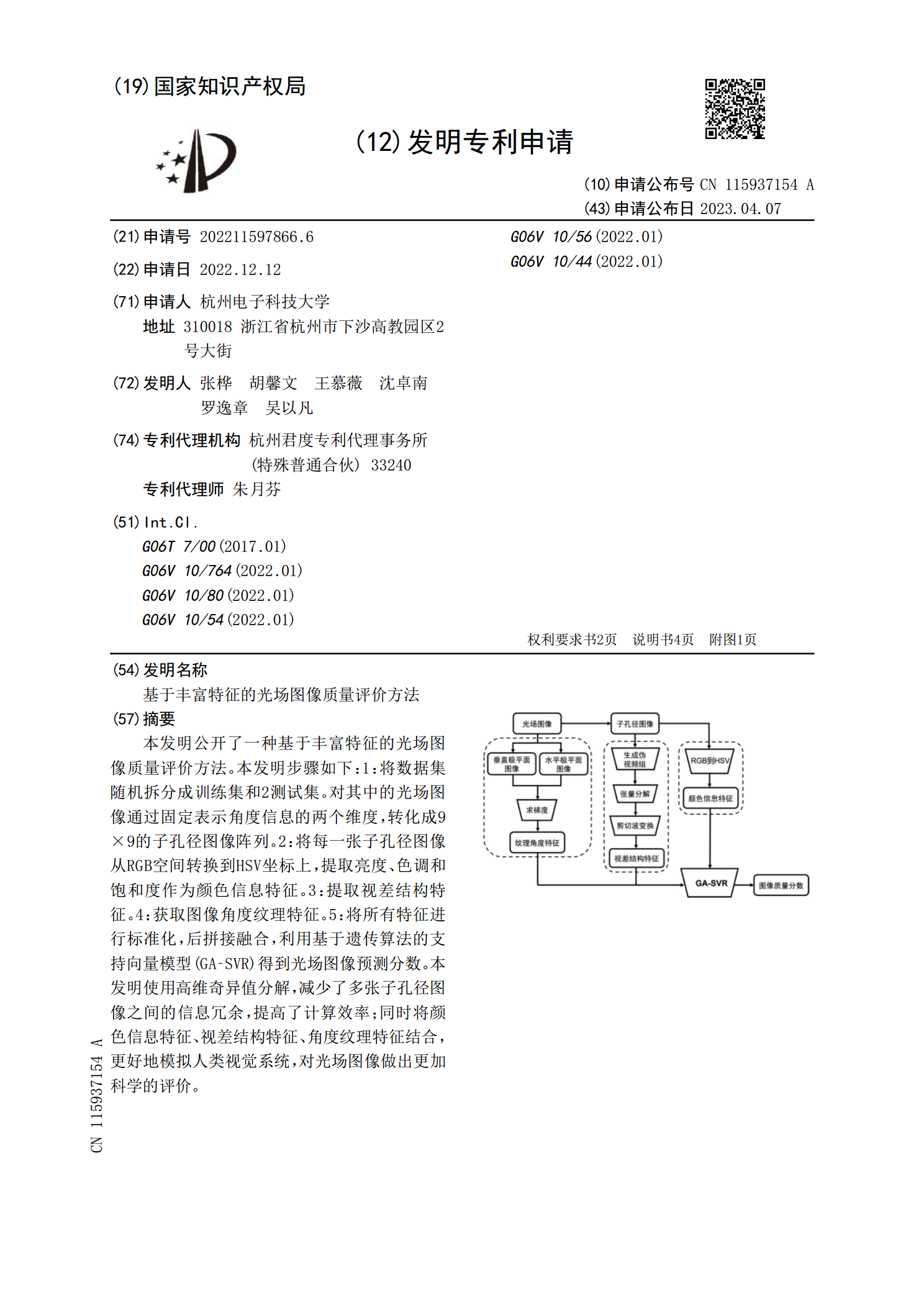
本发明公开了一种基于丰富特征的光场图像质量评价方法。本发明步骤如下:1:将数据集随机拆分成训练集和2测试集。对其中的光场图像通过固定表示角度信息的两个维度,转化成9×9的子孔径图像阵列。2:将每一张子孔径图像从RGB空间转换到HSV坐标上,提取亮度、色调和饱和度作为颜色信息特征。3:提取视差结构特征。4:获取图像角度纹理特征。5:将所有特征进行标准化,后拼接融合,利用基于遗传算法的支持向量模型(GA‑SVR)得到光场图像预测分数。本发明使用高维奇异值分解,减少了多张子孔径图像之间的信息冗余,提高了计算效率
基于多尺度轮廓波特征的全参考光场图像质量评价方法.pdf
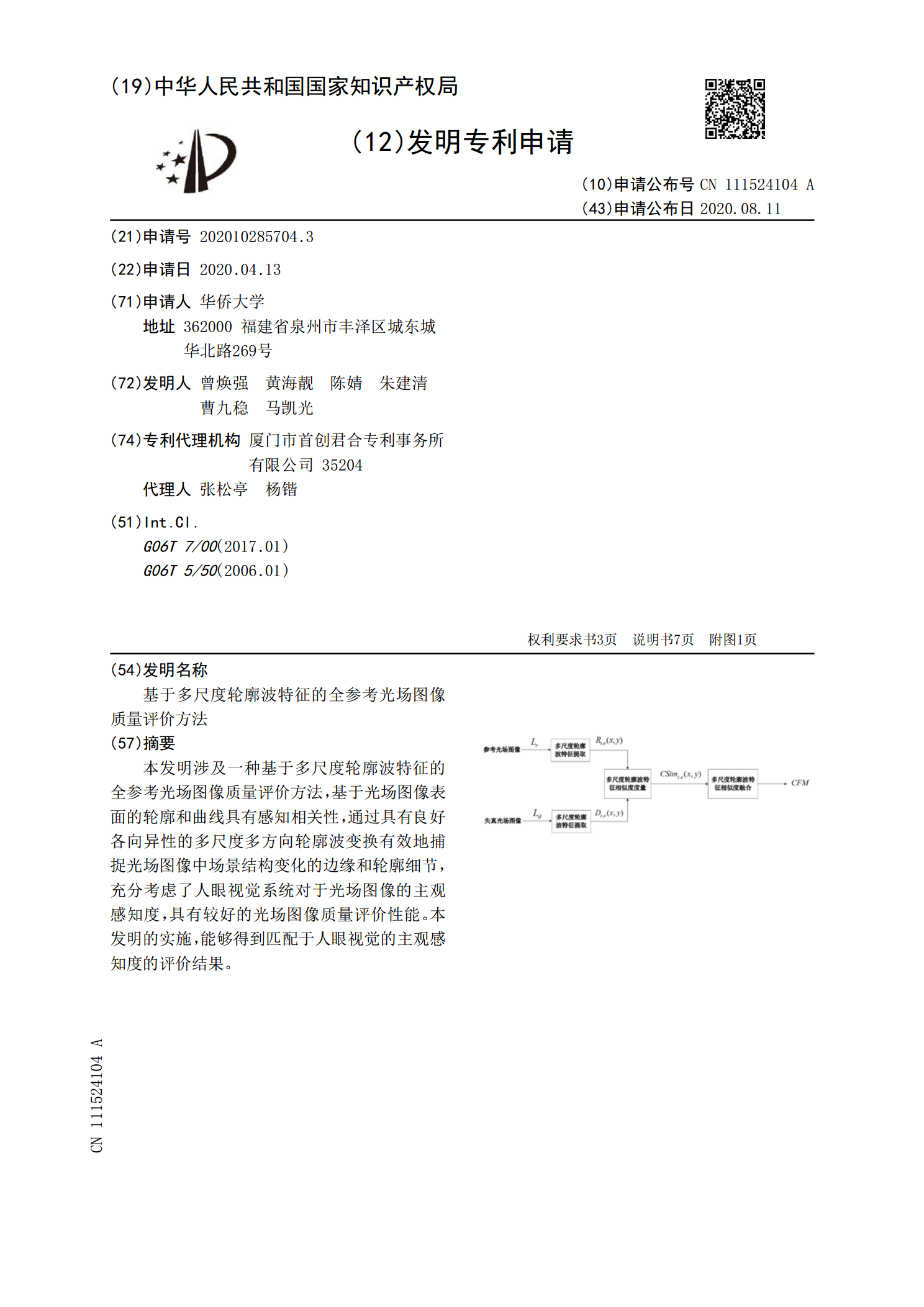
本发明涉及一种基于多尺度轮廓波特征的全参考光场图像质量评价方法,基于光场图像表面的轮廓和曲线具有感知相关性,通过具有良好各向异性的多尺度多方向轮廓波变换有效地捕捉光场图像中场景结构变化的边缘和轮廓细节,充分考虑了人眼视觉系统对于光场图像的主观感知度,具有较好的光场图像质量评价性能。本发明的实施,能够得到匹配于人眼视觉的主观感知度的评价结果。

基于剪切波变换的光场图像质量评价方法.docx
基于剪切波变换的光场图像质量评价方法论文题目:基于剪切波变换的光场图像质量评价方法摘要:随着光场图像获取和应用的广泛发展,对光场图像质量的评价也变得越来越重要。本文提出了一种基于剪切波变换的光场图像质量评价方法。首先,通过剪切波变换将光场图像转换为频率域表示;然后,引入亮度分量和空间频率分量结合的图像质量评价模型,以量化光场图像在空域和频域上的质量;最后,利用主观评价实验和客观评价指标对所提方法进行了测试与验证。实验结果表明,该方法能够准确评估光场图像的质量,具有很好的鲁棒性。关键词:光场图像,质量评价,

基于EPI的光场图像特征点检测方法.pdf
本发明公开一种基于EPI的光场图像特征点检测方法,具体按照以下步骤实施:步骤1,输入光场图像做预处理,子孔径图像矩阵;步骤2,对子孔径图像矩阵中中间行的子孔径图像做处理,提取中间行的子孔径图像中每一行像素的EPI图像作为EPI图像集合;步骤3,对EPI图像集合中每个EPI图像进行SIFT特征点检测,得到特征点集合a;步骤4,保留特征点集合a中在每个SIFT尺度下都存在的特征点,记为特征点集合b;步骤5,对特征点集合b中的特征点进行指标量化排序,根据不同光场图像的情况,保留排序前40%~60%的特征点作为最

基于多视觉特征聚合的光场质量评价方法.pptx
汇报人:/目录0102光场质量评价的必要性现有光场质量评价方法介绍多视觉特征聚合方法的提出03视觉特征提取特征聚合方式聚合结果与光场质量的关联04实验数据集介绍实验过程与方法实验结果展示与分析05多视觉特征聚合方法的优势方法的局限性未来改进方向06在虚拟现实/增强现实领域的应用在光场相机设计中的应用在视频压缩与传输中的应用未来发展前景与挑战汇报人: