
一种基于多尺度Harris的光场图像特征点检测方法.pdf

小琛****82


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多尺度Harris的光场图像特征点检测方法.pdf
本发明公开了一种基于多尺度Harris的光场图像特征检测方法,具体过程为:将光场原始图像参数文件读入MATLAB,解码并处理为有效四维光场矩阵;将角度分辨率[u,v]中的最大值作为斜率列表的长度n,得到斜率列表,斜率列表中每个斜率进行重聚焦,得到斜率对应的焦点堆栈图像;对每一个焦点堆栈图像进行多尺度Harris角点检测;对当前角点堆栈的每一个尺度检测的角点进行非极大值抑制,减少多响应的影响。再对候选角点进行多尺度判断,若在多个尺度出现,则保留;否则删除;最终保留的角点即为光场图像的特征点;采用光场图像中的
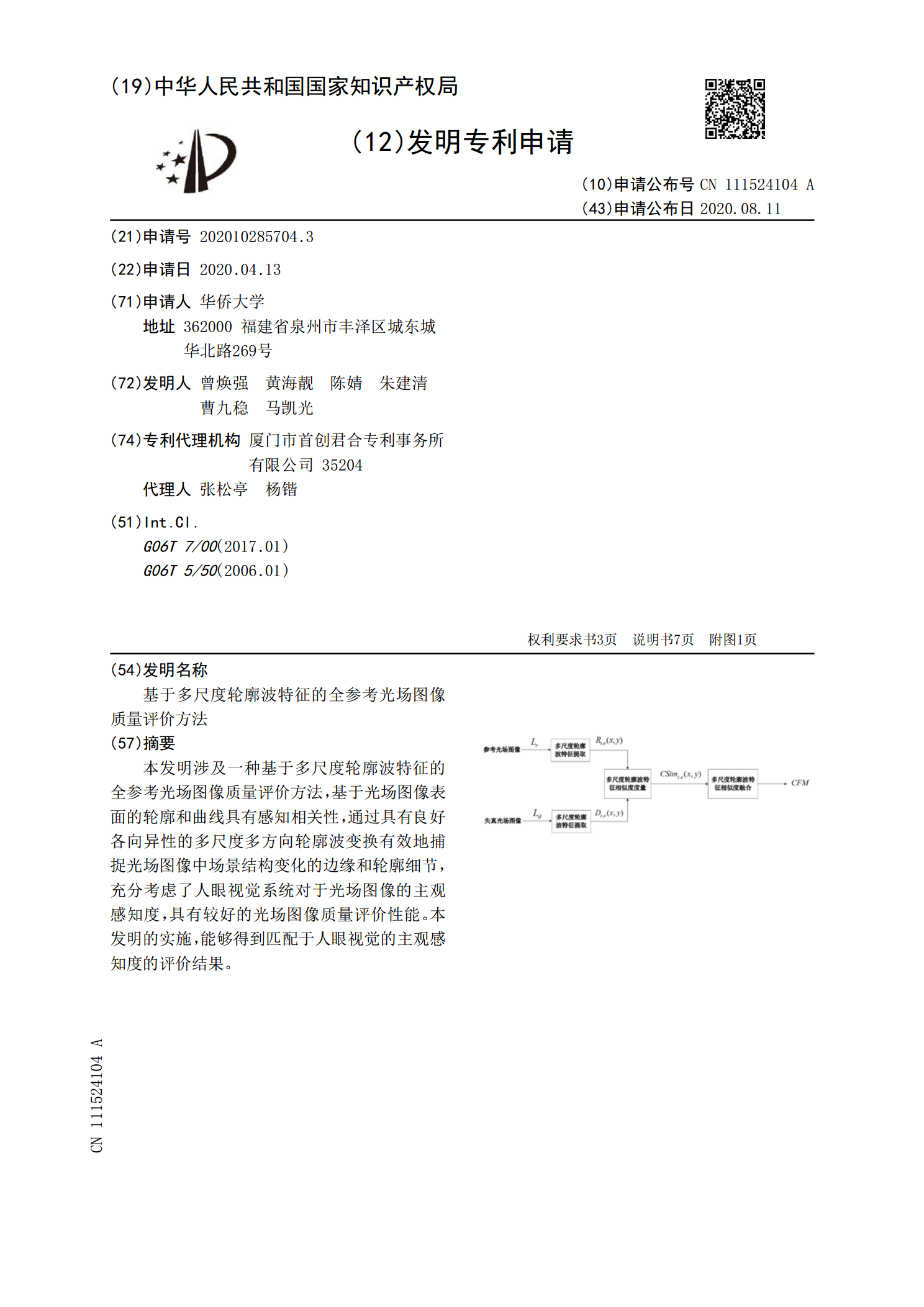
基于多尺度轮廓波特征的全参考光场图像质量评价方法.pdf
本发明涉及一种基于多尺度轮廓波特征的全参考光场图像质量评价方法,基于光场图像表面的轮廓和曲线具有感知相关性,通过具有良好各向异性的多尺度多方向轮廓波变换有效地捕捉光场图像中场景结构变化的边缘和轮廓细节,充分考虑了人眼视觉系统对于光场图像的主观感知度,具有较好的光场图像质量评价性能。本发明的实施,能够得到匹配于人眼视觉的主观感知度的评价结果。

基于EPI的光场图像特征点检测方法.pdf
本发明公开一种基于EPI的光场图像特征点检测方法,具体按照以下步骤实施:步骤1,输入光场图像做预处理,子孔径图像矩阵;步骤2,对子孔径图像矩阵中中间行的子孔径图像做处理,提取中间行的子孔径图像中每一行像素的EPI图像作为EPI图像集合;步骤3,对EPI图像集合中每个EPI图像进行SIFT特征点检测,得到特征点集合a;步骤4,保留特征点集合a中在每个SIFT尺度下都存在的特征点,记为特征点集合b;步骤5,对特征点集合b中的特征点进行指标量化排序,根据不同光场图像的情况,保留排序前40%~60%的特征点作为最
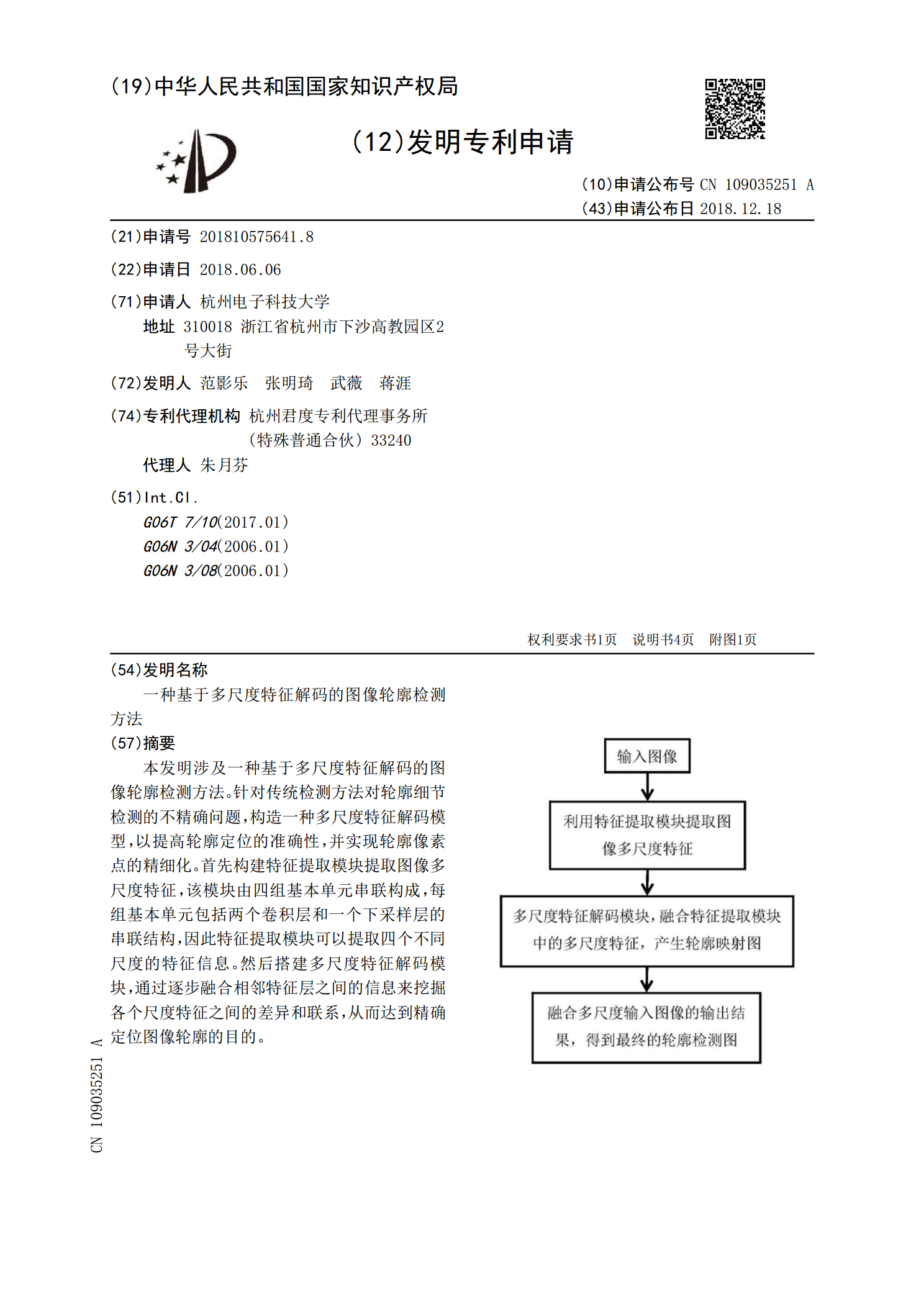
一种基于多尺度特征解码的图像轮廓检测方法.pdf
本发明涉及一种基于多尺度特征解码的图像轮廓检测方法。针对传统检测方法对轮廓细节检测的不精确问题,构造一种多尺度特征解码模型,以提高轮廓定位的准确性,并实现轮廓像素点的精细化。首先构建特征提取模块提取图像多尺度特征,该模块由四组基本单元串联构成,每组基本单元包括两个卷积层和一个下采样层的串联结构,因此特征提取模块可以提取四个不同尺度的特征信息。然后搭建多尺度特征解码模块,通过逐步融合相邻特征层之间的信息来挖掘各个尺度特征之间的差异和联系,从而达到精确定位图像轮廓的目的。
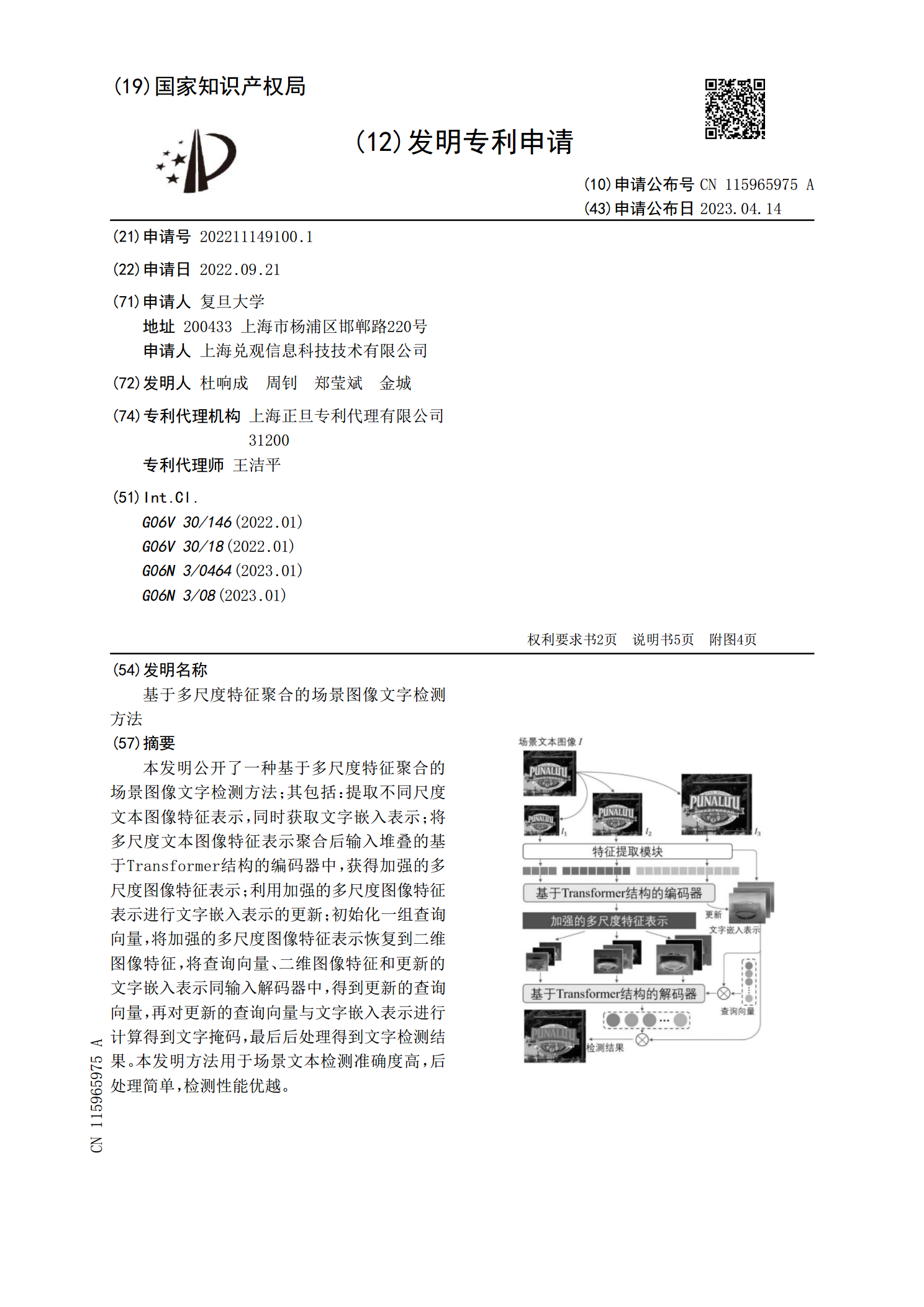
基于多尺度特征聚合的场景图像文字检测方法.pdf
本发明公开了一种基于多尺度特征聚合的场景图像文字检测方法;其包括:提取不同尺度文本图像特征表示,同时获取文字嵌入表示;将多尺度文本图像特征表示聚合后输入堆叠的基于Transformer结构的编码器中,获得加强的多尺度图像特征表示;利用加强的多尺度图像特征表示进行文字嵌入表示的更新;初始化一组查询向量,将加强的多尺度图像特征表示恢复到二维图像特征,将查询向量、二维图像特征和更新的文字嵌入表示同输入解码器中,得到更新的查询向量,再对更新的查询向量与文字嵌入表示进行计算得到文字掩码,最后后处理得到文字检测结果。