
卷曲致动器系统和方法.pdf

猫巷****觅蓉

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

卷曲致动器系统和方法.pdf
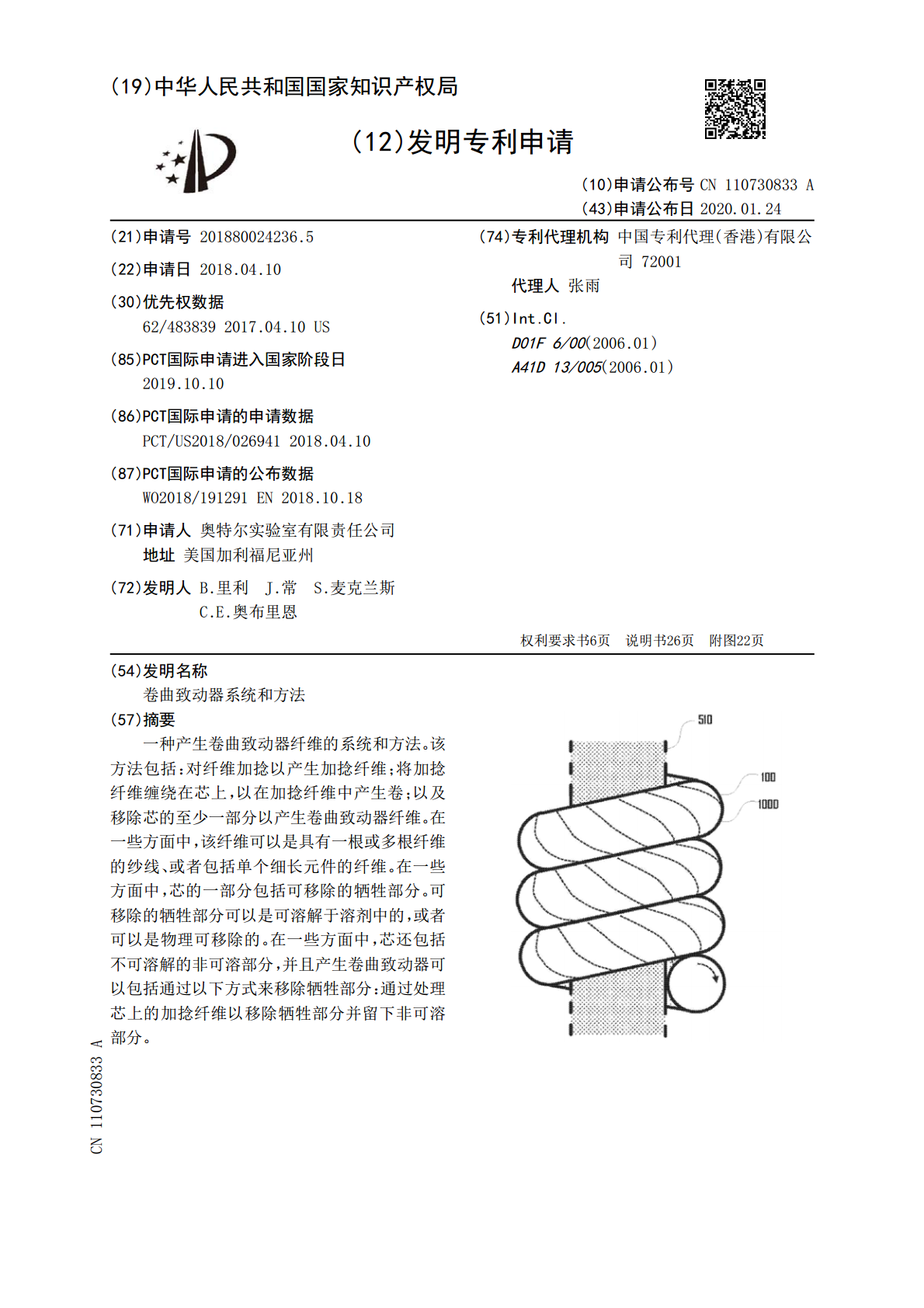
一种产生卷曲致动器纤维的系统和方法。该方法包括:对纤维加捻以产生加捻纤维;将加捻纤维缠绕在芯上,以在加捻纤维中产生卷;以及移除芯的至少一部分以产生卷曲致动器纤维。在一些方面中,该纤维可以是具有一根或多根纤维的纱线、或者包括单个细长元件的纤维。在一些方面中,芯的一部分包括可移除的牺牲部分。可移除的牺牲部分可以是可溶解于溶剂中的,或者可以是物理可移除的。在一些方面中,芯还包括不可溶解的非可溶部分,并且产生卷曲致动器可以包括通过以下方式来移除牺牲部分:通过处理芯上的加捻纤维以移除牺牲部分并留下非可溶部分。
致动器装置和致动器系统.pdf
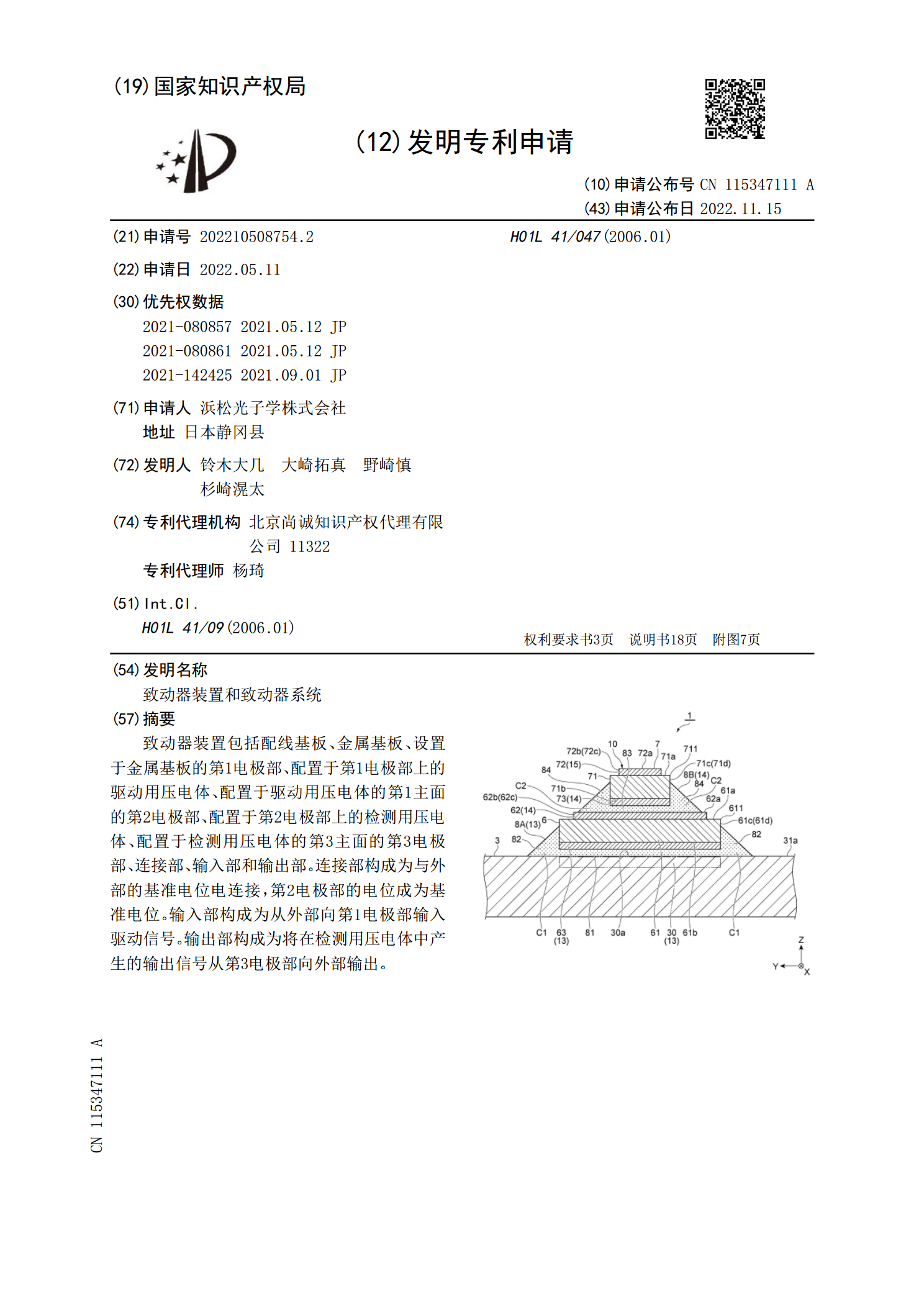
致动器装置包括配线基板、金属基板、设置于金属基板的第1电极部、配置于第1电极部上的驱动用压电体、配置于驱动用压电体的第1主面的第2电极部、配置于第2电极部上的检测用压电体、配置于检测用压电体的第3主面的第3电极部、连接部、输入部和输出部。连接部构成为与外部的基准电位电连接,第2电极部的电位成为基准电位。输入部构成为从外部向第1电极部输入驱动信号。输出部构成为将在检测用压电体中产生的输出信号从第3电极部向外部输出。
致动器控制装置和致动器控制方法.pdf
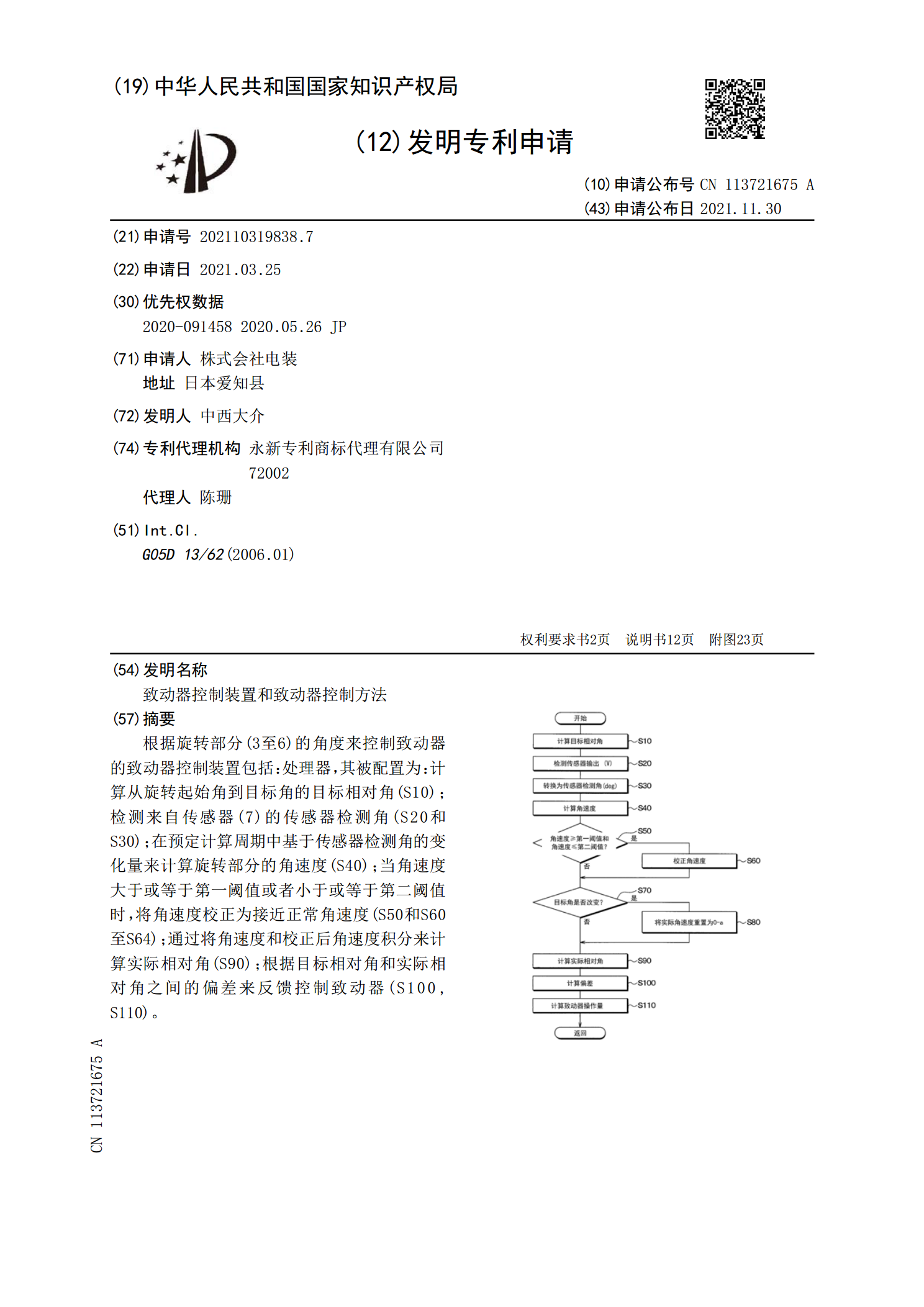
根据旋转部分(3至6)的角度来控制致动器的致动器控制装置包括:处理器,其被配置为:计算从旋转起始角到目标角的目标相对角(S10);检测来自传感器(7)的传感器检测角(S20和S30);在预定计算周期中基于传感器检测角的变化量来计算旋转部分的角速度(S40);当角速度大于或等于第一阈值或者小于或等于第二阈值时,将角速度校正为接近正常角速度(S50和S60至S64);通过将角速度和校正后角速度积分来计算实际相对角(S90);根据目标相对角和实际相对角之间的偏差来反馈控制致动器(S100,S110)。

运行用于离合器操纵系统的致动器组件的方法和致动器组件.pdf
本发明涉及一种运行用于离合器操纵系统的致动器组件的方法,致动器组件包括电动机式操纵的、具有螺杆(4)的传动装置(2),螺杆将旋转运动转变成活塞(5)在轴向上的直线运动,其中,借助传感器装置(6、10)确定活塞(5)经过的轴向位移。在减小致动器组件的结构空间的方法中,电感式的传感器装置(6、10)和与活塞(5)连接的金属螺杆(4)作用式连接,其中,金属螺杆(4)用作确定轴向位移的传感器目标。

缆索致动器和缆索致动式设备和系统.pdf
缆索致动器包括壳体和设置在壳体内的凸轮。凸轮包括第一缆索夹持部和第二缆索夹持部。凸轮能够在第一位置和第二位置之间运动,在第一位置第一缆索夹持部处于致动位置且第二缆索夹持部处于返回位置,在第二位置第一缆索夹持部处于返回位置且第二缆索夹持部处于致动位置。