
致动器控制装置和致动器控制方法.pdf

小长****6淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共38页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
致动器控制装置和致动器控制方法.pdf
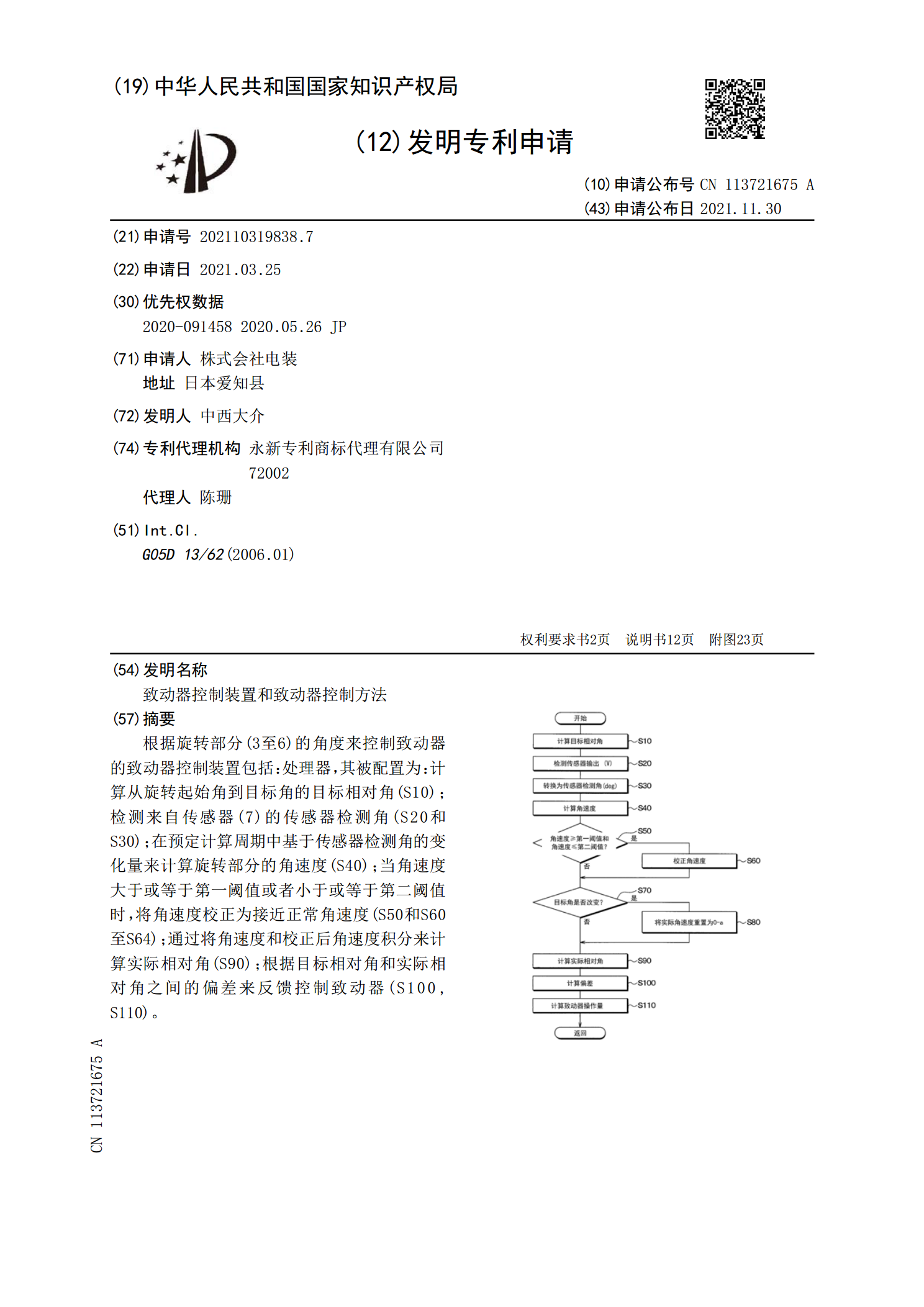
根据旋转部分(3至6)的角度来控制致动器的致动器控制装置包括:处理器,其被配置为:计算从旋转起始角到目标角的目标相对角(S10);检测来自传感器(7)的传感器检测角(S20和S30);在预定计算周期中基于传感器检测角的变化量来计算旋转部分的角速度(S40);当角速度大于或等于第一阈值或者小于或等于第二阈值时,将角速度校正为接近正常角速度(S50和S60至S64);通过将角速度和校正后角速度积分来计算实际相对角(S90);根据目标相对角和实际相对角之间的偏差来反馈控制致动器(S100,S110)。
致动器装置和致动器系统.pdf
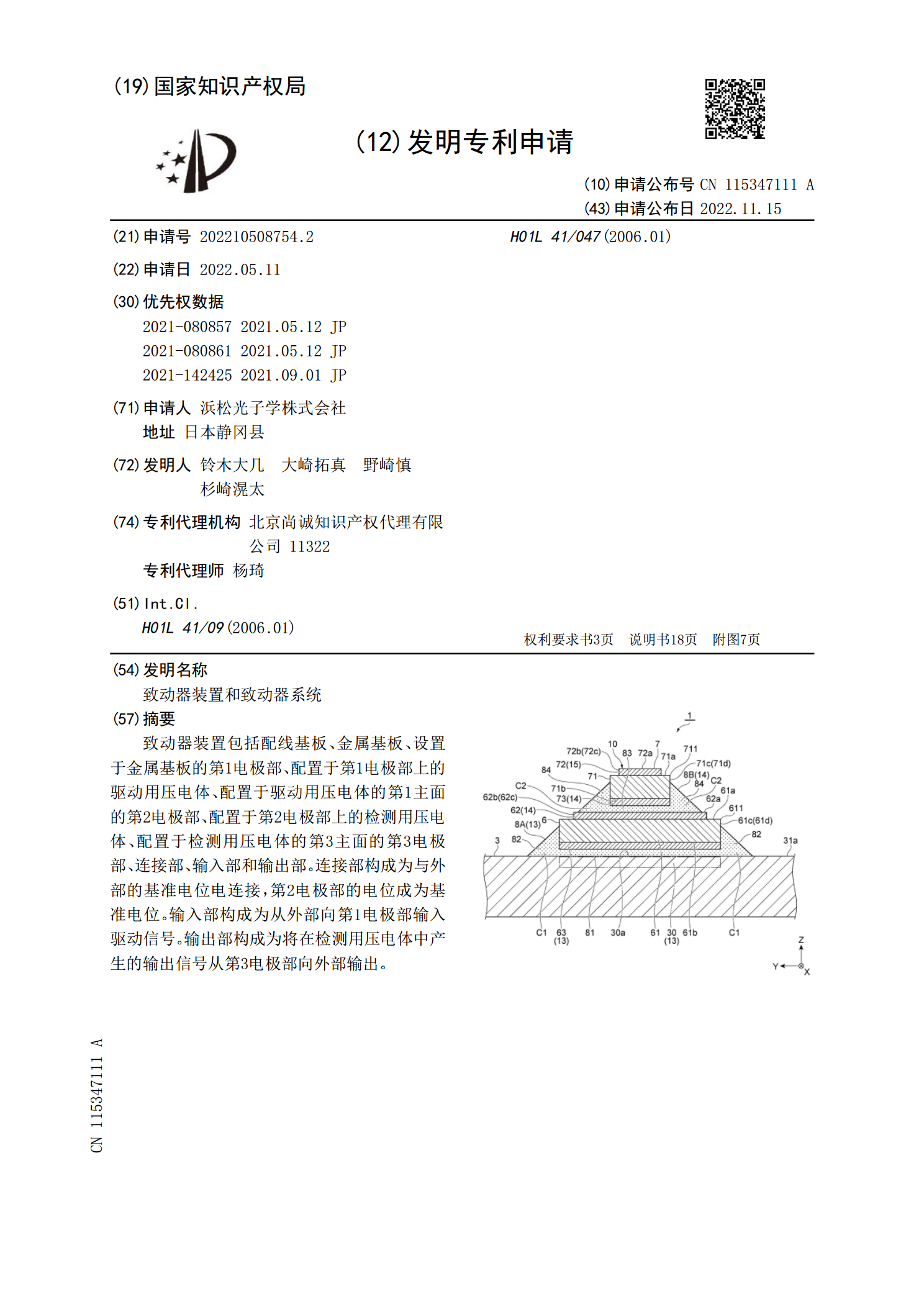
致动器装置包括配线基板、金属基板、设置于金属基板的第1电极部、配置于第1电极部上的驱动用压电体、配置于驱动用压电体的第1主面的第2电极部、配置于第2电极部上的检测用压电体、配置于检测用压电体的第3主面的第3电极部、连接部、输入部和输出部。连接部构成为与外部的基准电位电连接,第2电极部的电位成为基准电位。输入部构成为从外部向第1电极部输入驱动信号。输出部构成为将在检测用压电体中产生的输出信号从第3电极部向外部输出。

用于控制机电致动器的装置和方法.pdf
提供了机电致动系统和相关操作方法。一种响应于输入端子处的输入命令信号来控制机电致动器的方法涉及:基于所述输入命令信号的特性确定命令式致动状态值;基于所述命令式致动状态值和与所述机电致动器相关联的致动器类型生成驱动器命令信号;以及根据所述驱动器命令信号操作驱动器电路系统以在耦接到所述机电致动器的输出端子处提供输出信号。
用于控制档位转换致动器的方法和相应的换档致动器.pdf
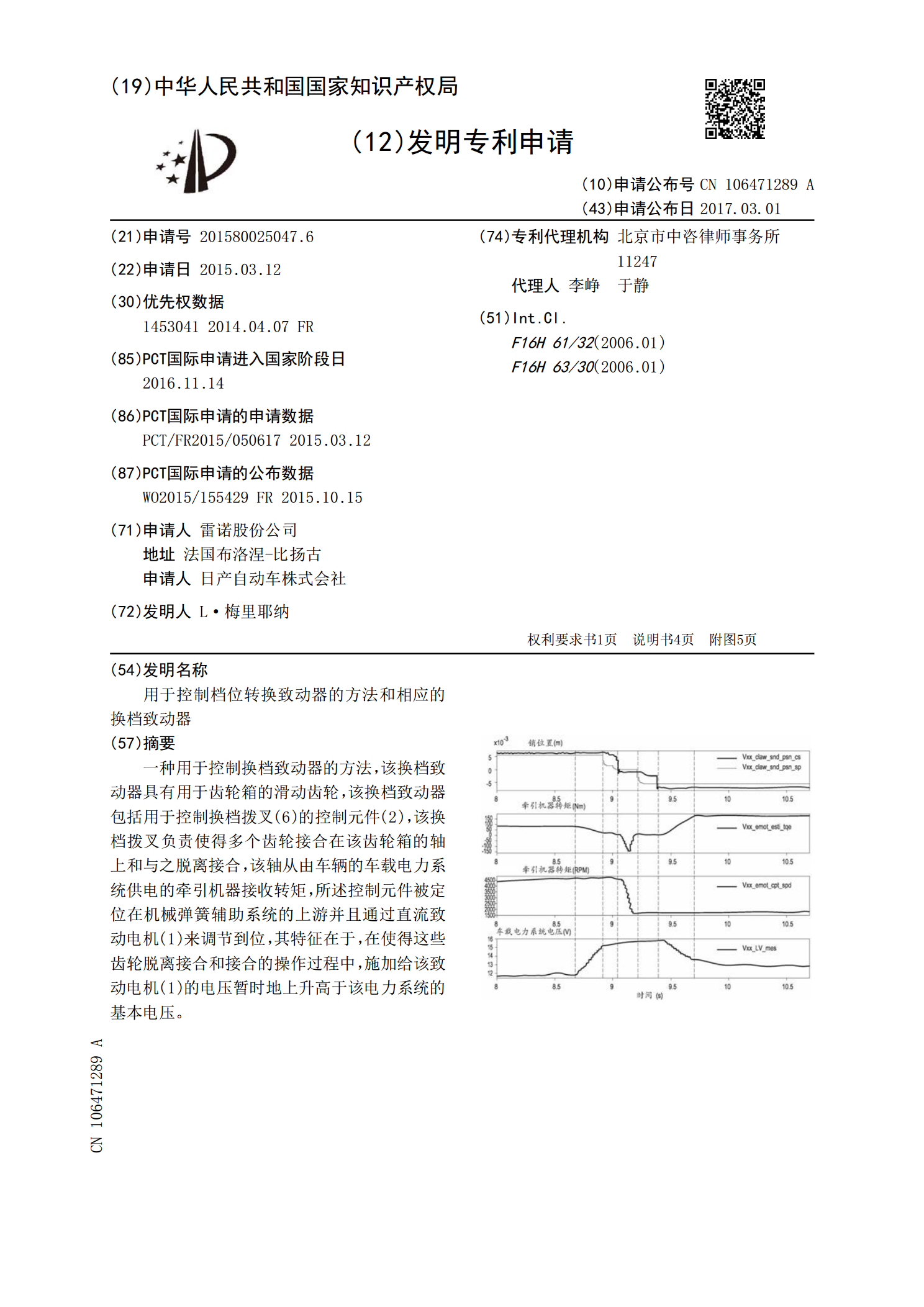
一种用于控制换档致动器的方法,该换档致动器具有用于齿轮箱的滑动齿轮,该换档致动器包括用于控制换档拨叉(6)的控制元件(2),该换档拨叉负责使得多个齿轮接合在该齿轮箱的轴上和与之脱离接合,该轴从由车辆的车载电力系统供电的牵引机器接收转矩,所述控制元件被定位在机械弹簧辅助系统的上游并且通过直流致动电机(1)来调节到位,其特征在于,在使得这些齿轮脱离接合和接合的操作过程中,施加给该致动电机(1)的电压暂时地上升高于该电力系统的基本电压。

具有凸轮、随动件和控制器的致动器装置.pdf
一种致动器装置,具有马达驱动的凸轮、联接至输出构件且由凸轮驱动的随动件和用于控制马达的运行的控制器。凸轮具有第一凸轮表面、第二凸轮表面以及第一和第二凸轮表面之间的提升部分。控制器被配置为随着随动件相对于凸轮沿提升部分朝向第二凸轮表面移动时识别提升部分上的预定点。控制器采用输出构件沿输出构件轴线的位置作为凸轮绕凸轮轴线的旋转位置的函数的形式的变化率识别预定点。控制器基于预定点控制马达的运行,以便将随动件定位在第二凸轮表面上。