
一种车载激光雷达点云信号地面点分离方法.pdf

一只****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车载激光雷达点云信号地面点分离方法.pdf
本发明公开了一种车载激光雷达点云信号地面点分离方法,具体的步骤如下:S1:读取原始激光雷达点云信号;S2:根据时间戳把所述原始激光雷达点云信号分解为单帧点云信号;S3:利用激光雷达的水平分辨率针对单帧点云信号,计算垂直线数量;S4:针对每一条垂直线寻找其地面初始点和阈值点;S5:根据每条垂直线上的地面初始点和阈值点的选取将点云信号划分为地面点和非地面点,得到最终的分离结果。该方法在满足实时性要求的同时精度可以达到保障。且该方法基于数学模型而非数据驱动式模型,有良好的可验证性以及实用性,该算法处理用时较短,
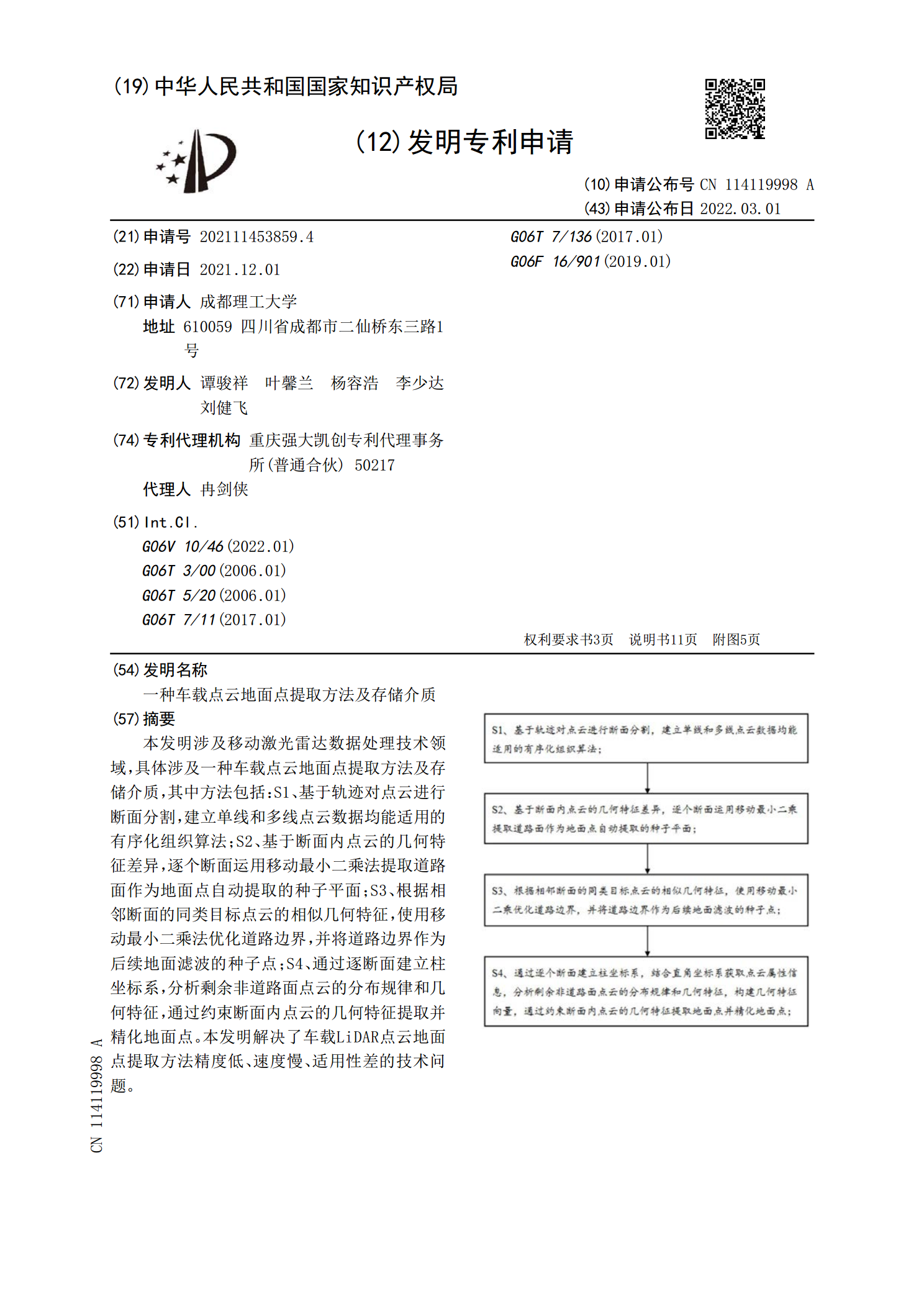
一种车载点云地面点提取方法及存储介质.pdf
本发明涉及移动激光雷达数据处理技术领域,具体涉及一种车载点云地面点提取方法及存储介质,其中方法包括:S1、基于轨迹对点云进行断面分割,建立单线和多线点云数据均能适用的有序化组织算法;S2、基于断面内点云的几何特征差异,逐个断面运用移动最小二乘法提取道路面作为地面点自动提取的种子平面;S3、根据相邻断面的同类目标点云的相似几何特征,使用移动最小二乘法优化道路边界,并将道路边界作为后续地面滤波的种子点;S4、通过逐断面建立柱坐标系,分析剩余非道路面点云的分布规律和几何特征,通过约束断面内点云的几何特征提取并精
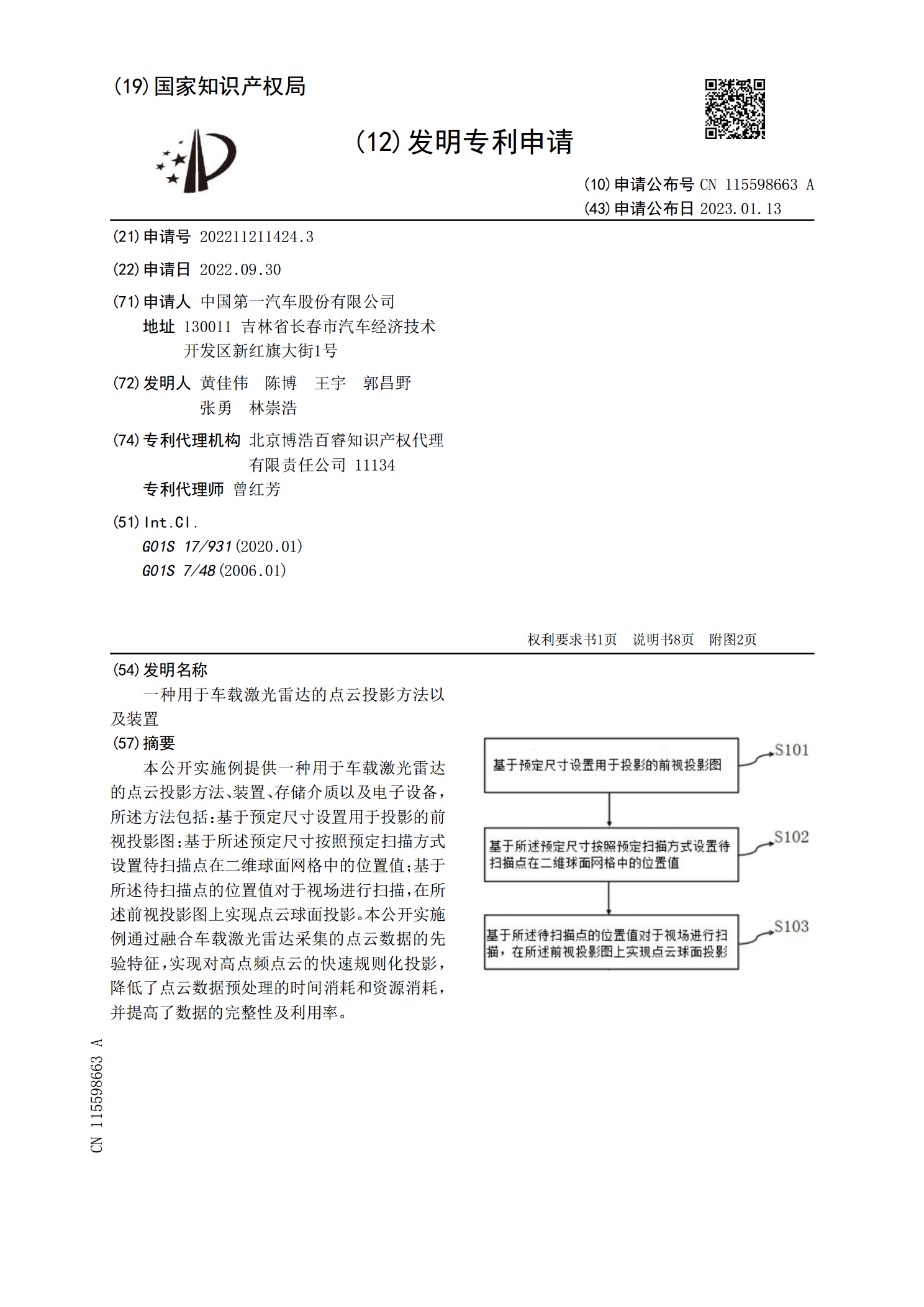
一种用于车载激光雷达的点云投影方法以及装置.pdf
本公开实施例提供一种用于车载激光雷达的点云投影方法、装置、存储介质以及电子设备,所述方法包括:基于预定尺寸设置用于投影的前视投影图;基于所述预定尺寸按照预定扫描方式设置待扫描点在二维球面网格中的位置值;基于所述待扫描点的位置值对于视场进行扫描,在所述前视投影图上实现点云球面投影。本公开实施例通过融合车载激光雷达采集的点云数据的先验特征,实现对高点频点云的快速规则化投影,降低了点云数据预处理的时间消耗和资源消耗,并提高了数据的完整性及利用率。
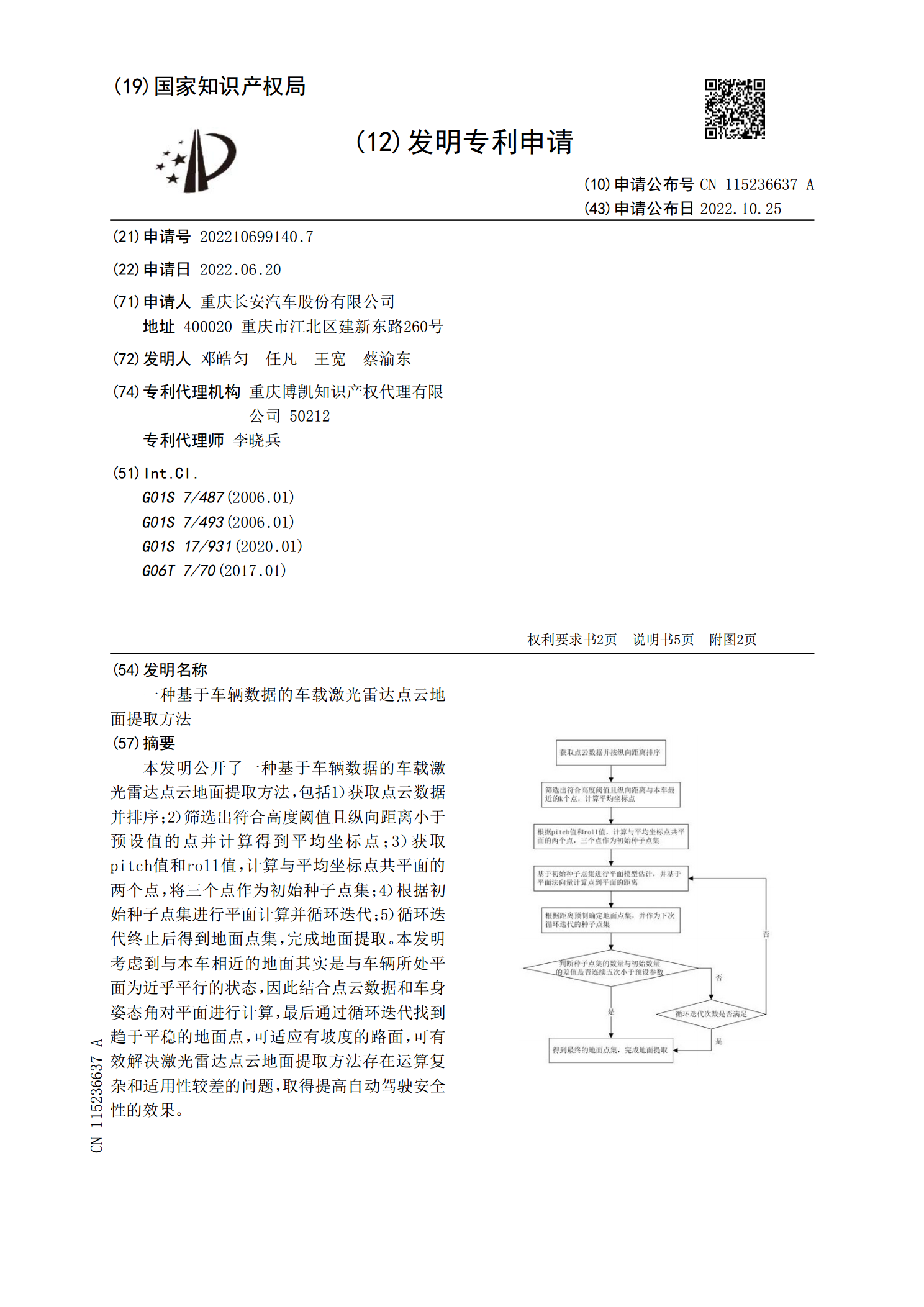
一种基于车辆数据的车载激光雷达点云地面提取方法.pdf
本发明公开了一种基于车辆数据的车载激光雷达点云地面提取方法,包括1)获取点云数据并排序;2)筛选出符合高度阈值且纵向距离小于预设值的点并计算得到平均坐标点;3)获取pitch值和roll值,计算与平均坐标点共平面的两个点,将三个点作为初始种子点集;4)根据初始种子点集进行平面计算并循环迭代;5)循环迭代终止后得到地面点集,完成地面提取。本发明考虑到与本车相近的地面其实是与车辆所处平面为近乎平行的状态,因此结合点云数据和车身姿态角对平面进行计算,最后通过循环迭代找到趋于平稳的地面点,可适应有坡度的路面,可有
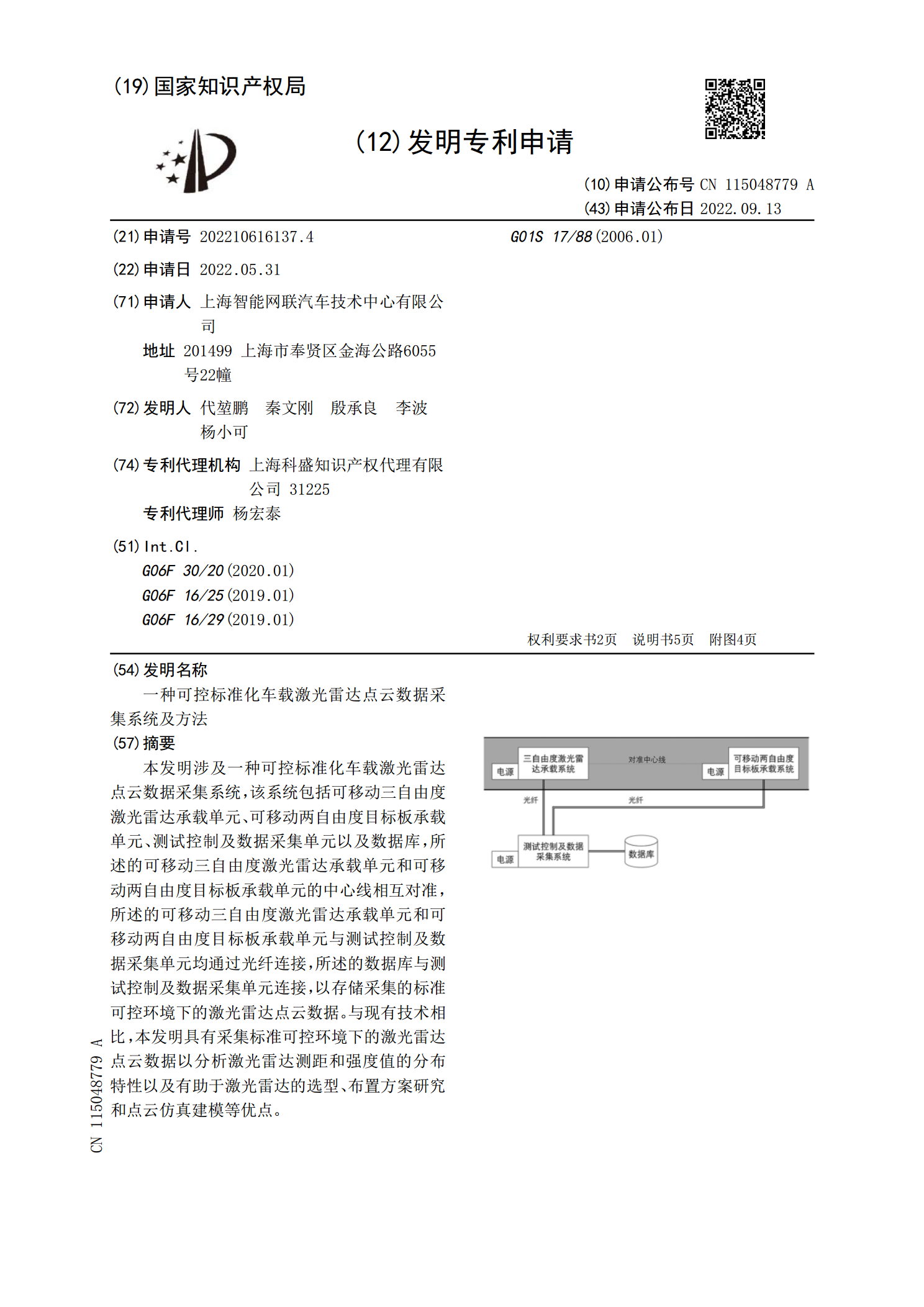
一种可控标准化车载激光雷达点云数据采集系统及方法.pdf
本发明涉及一种可控标准化车载激光雷达点云数据采集系统,该系统包括可移动三自由度激光雷达承载单元、可移动两自由度目标板承载单元、测试控制及数据采集单元以及数据库,所述的可移动三自由度激光雷达承载单元和可移动两自由度目标板承载单元的中心线相互对准,所述的可移动三自由度激光雷达承载单元和可移动两自由度目标板承载单元与测试控制及数据采集单元均通过光纤连接,所述的数据库与测试控制及数据采集单元连接,以存储采集的标准可控环境下的激光雷达点云数据。与现有技术相比,本发明具有采集标准可控环境下的激光雷达点云数据以分析激光