
偏振光源、表面缺陷检测方法和装置.pdf

小宏****aa


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

偏振光源、表面缺陷检测方法和装置.pdf
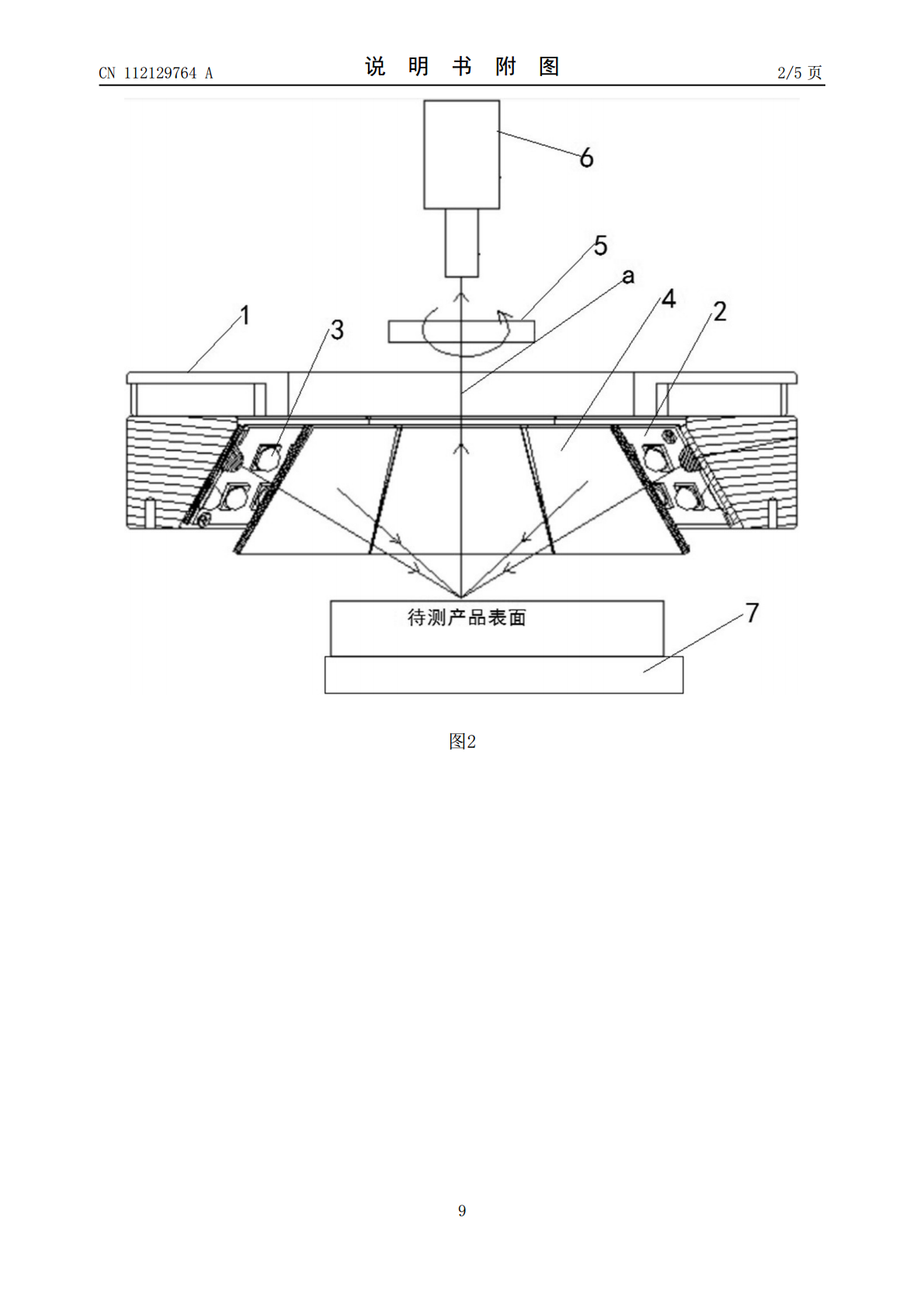
本发明提供了一种操作方便且能有效抑制高反光材料产品表面的强反光干扰的表面缺陷检测方法、表面缺陷检测装置及偏振光源。本发明设置偏振光源和表面缺陷检测装置,利用光的偏振特性消除高反光物体的镜面反射,但保留表面缺陷带来的散射光,通过成像模组获得若干偏振图像,再将这些偏振图像融合为一张包含有所有缺陷信息的图像,对图像进行缺陷检测算法分析计算,即得到该待测区域的缺陷检测结果;本发明采用偏振光高角度照明,从根本上解决了高反光的问题,因为光的偏振特性可以有效消除高反光物体的镜面反射,而无法消除表面缺陷带来的散射光,从而

表面缺陷检测装置及表面缺陷检测方法.pdf
一种表面缺陷检测装置及表面缺陷检测方法。对于钢材的表面的检查对象部位,从彼此向相反侧倾斜的方向以大致相同的入射角度,分别照射能够区分的第1及第2照明光,并分别拍摄被第1照明光照明的检查对象部位的第1图像及被第2照明光照明的检查对象部位的第2图像。生成该第1图像与第2图像的差分图像,并从差分图像的亮部及暗部中,基于沿着与第1或第2照明光的照射方向对应的规定方向的亮部及暗部的序列,将检查对象部位中的凸状部的亮部及暗部的组合去除,再基于该去除处理后留下的亮部及暗部的形状特征量或沿着规定方向的序列,来判定检查对象
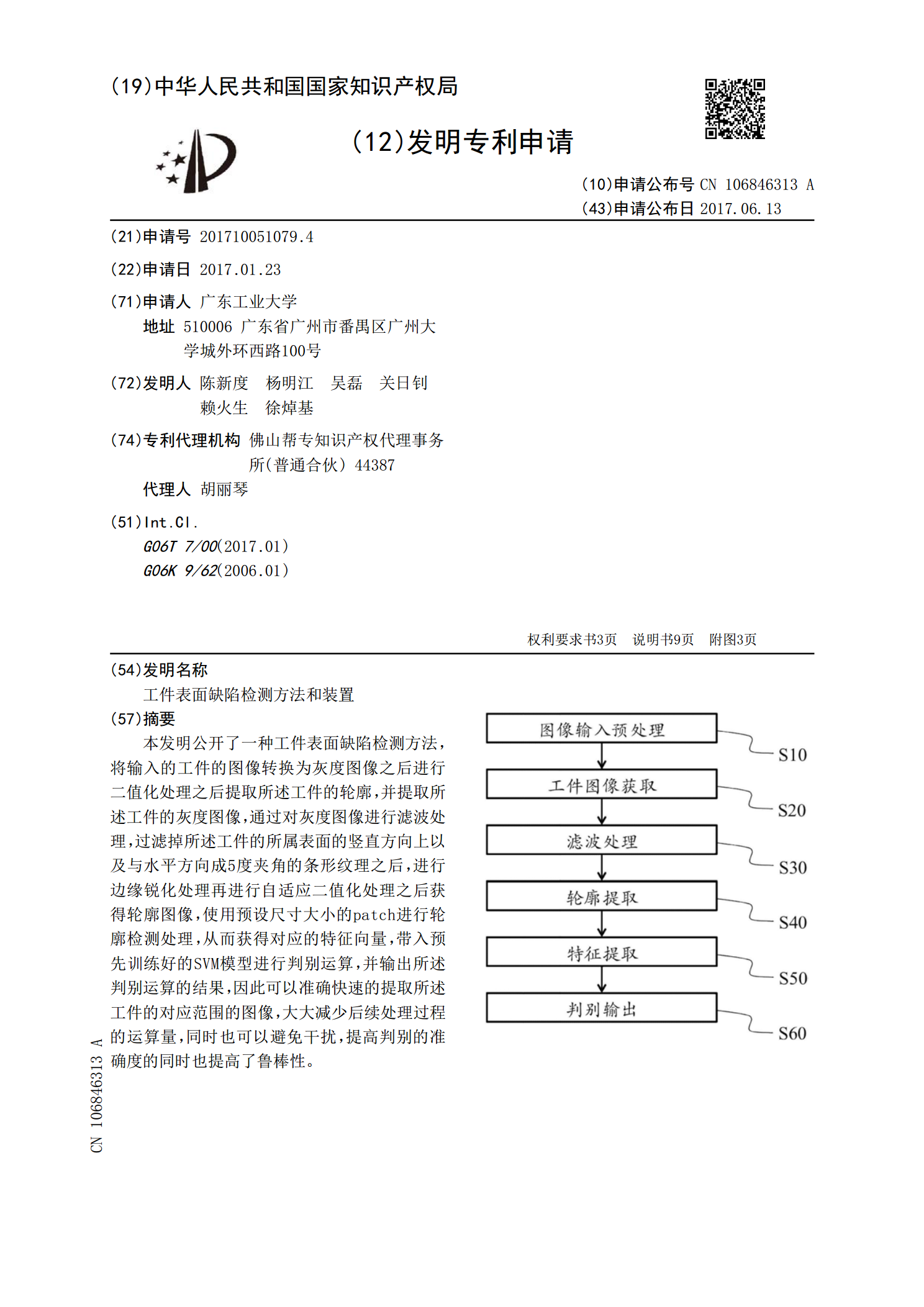
工件表面缺陷检测方法和装置.pdf
本发明公开了一种工件表面缺陷检测方法,将输入的工件的图像转换为灰度图像之后进行二值化处理之后提取所述工件的轮廓,并提取所述工件的灰度图像,通过对灰度图像进行滤波处理,过滤掉所述工件的所属表面的竖直方向上以及与水平方向成5度夹角的条形纹理之后,进行边缘锐化处理再进行自适应二值化处理之后获得轮廓图像,使用预设尺寸大小的patch进行轮廓检测处理,从而获得对应的特征向量,带入预先训练好的SVM模型进行判别运算,并输出所述判别运算的结果,因此可以准确快速的提取所述工件的对应范围的图像,大大减少后续处理过程的运算量
光源缺陷检测方法、装置、设备和存储介质.pdf
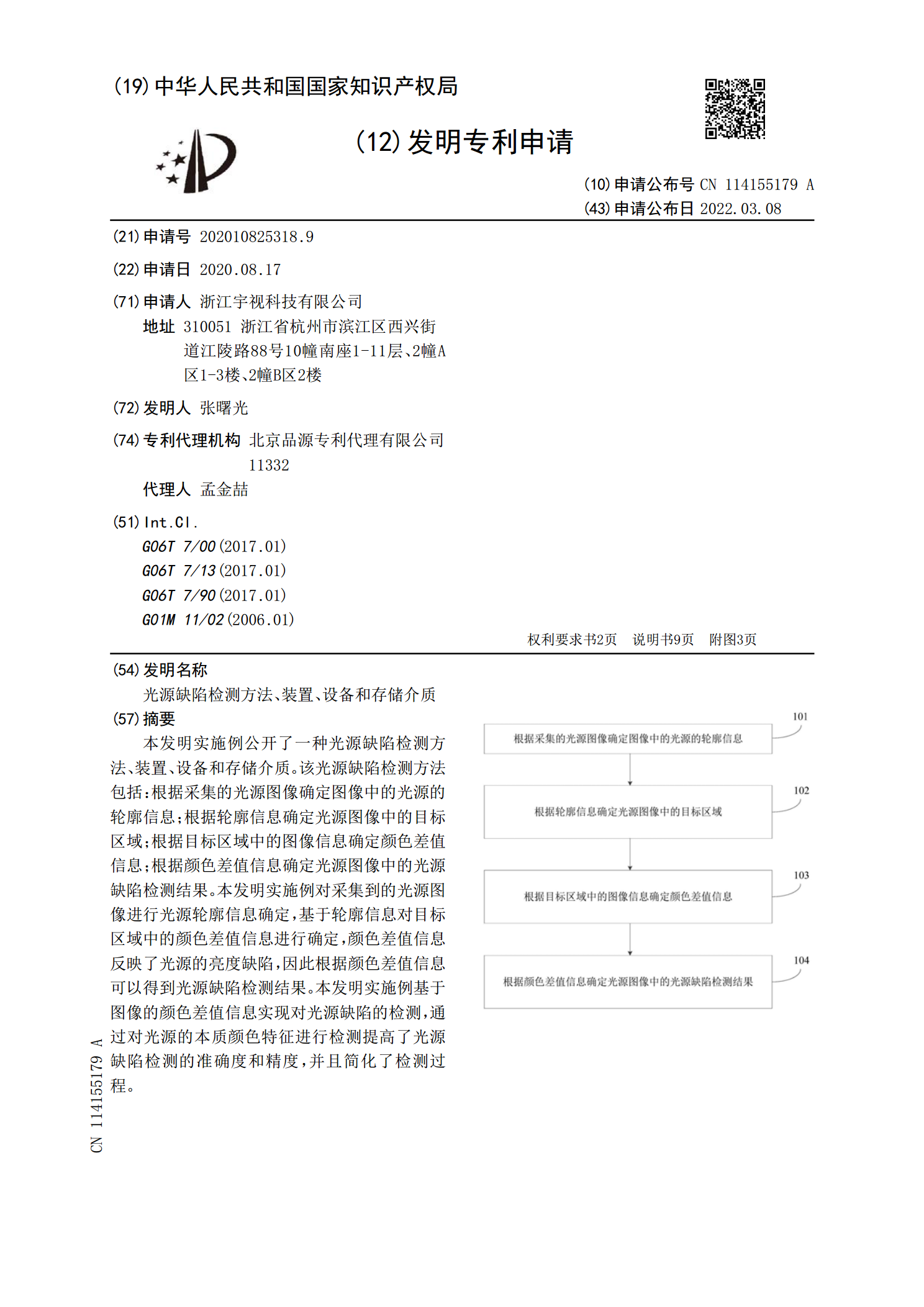
本发明实施例公开了一种光源缺陷检测方法、装置、设备和存储介质。该光源缺陷检测方法包括:根据采集的光源图像确定图像中的光源的轮廓信息;根据轮廓信息确定光源图像中的目标区域;根据目标区域中的图像信息确定颜色差值信息;根据颜色差值信息确定光源图像中的光源缺陷检测结果。本发明实施例对采集到的光源图像进行光源轮廓信息确定,基于轮廓信息对目标区域中的颜色差值信息进行确定,颜色差值信息反映了光源的亮度缺陷,因此根据颜色差值信息可以得到光源缺陷检测结果。本发明实施例基于图像的颜色差值信息实现对光源缺陷的检测,通过对光源的

基于多光源协同的表面缺陷检测方法及系统.pdf
本发明提供了一种基于多光源协同的表面缺陷检测方法及系统,包括采集物体在不同方向光源照射下的一组图像;对训练集样本进行随机裁剪,并添加噪声,得到训练数据;每个分支均以一个三通道RGB图像作为输入,得到多分支特征信息;对网络进行搭建,使用最大池化将多分支特征信息进行融合,将数量不定的特征向量聚合为一个具有固定通道数的特征图,保留各个分支最显著的特征,得到待训练检测模型;使用训练数据,输入待训练检测模型,完成模型前向计算,得到已训练检测模型;将已训练检测模型用于实际工业质检场景中,对工件表面缺陷进行检测。本发明