
基于多光源协同的表面缺陷检测方法及系统.pdf

一只****呀9


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多光源协同的表面缺陷检测方法及系统.pdf
本发明提供了一种基于多光源协同的表面缺陷检测方法及系统,包括采集物体在不同方向光源照射下的一组图像;对训练集样本进行随机裁剪,并添加噪声,得到训练数据;每个分支均以一个三通道RGB图像作为输入,得到多分支特征信息;对网络进行搭建,使用最大池化将多分支特征信息进行融合,将数量不定的特征向量聚合为一个具有固定通道数的特征图,保留各个分支最显著的特征,得到待训练检测模型;使用训练数据,输入待训练检测模型,完成模型前向计算,得到已训练检测模型;将已训练检测模型用于实际工业质检场景中,对工件表面缺陷进行检测。本发明
基于多尺度特征融合的表面微小缺陷视觉检测方法及系统.pdf
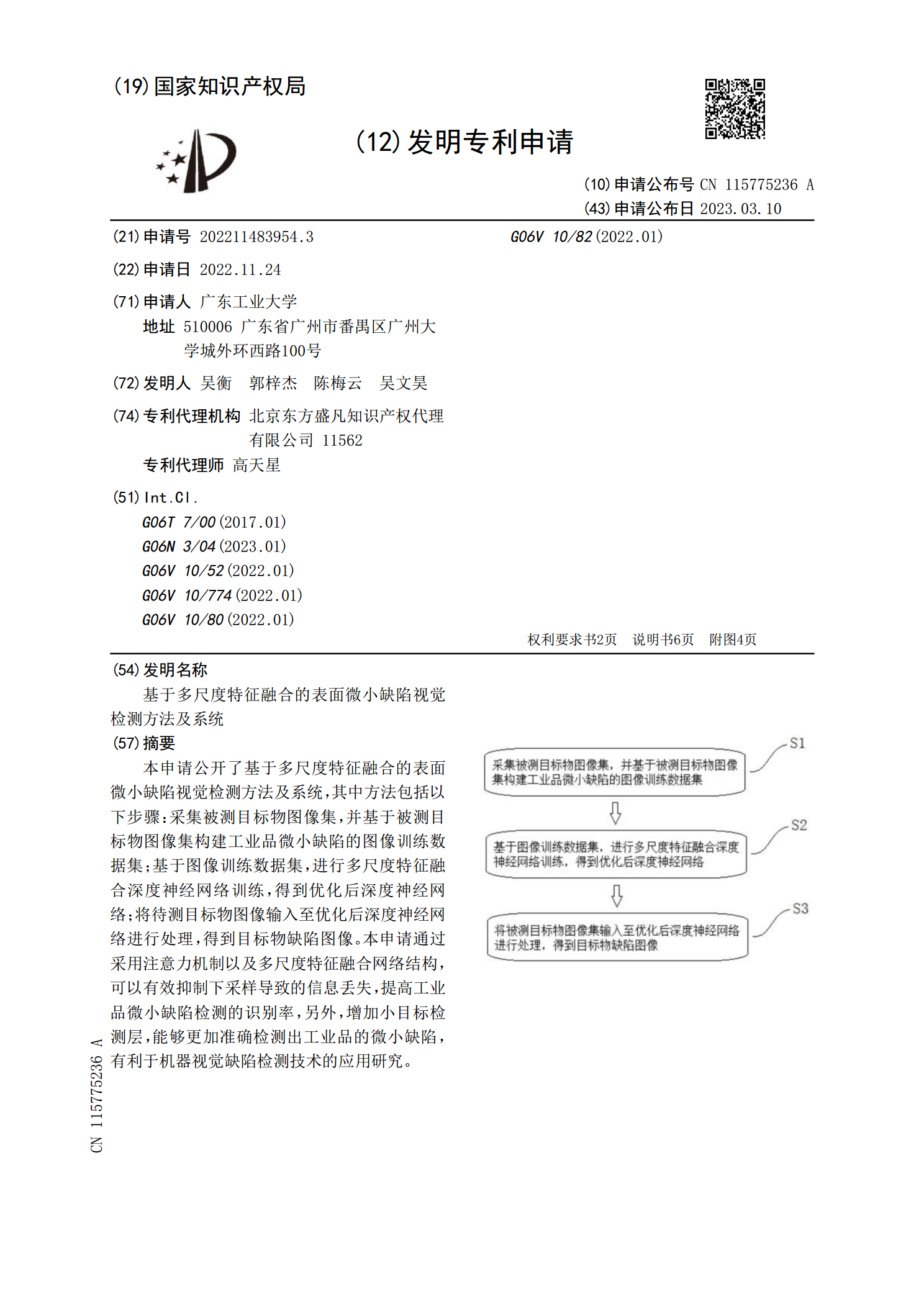
本申请公开了基于多尺度特征融合的表面微小缺陷视觉检测方法及系统,其中方法包括以下步骤:采集被测目标物图像集,并基于被测目标物图像集构建工业品微小缺陷的图像训练数据集;基于图像训练数据集,进行多尺度特征融合深度神经网络训练,得到优化后深度神经网络;将待测目标物图像输入至优化后深度神经网络进行处理,得到目标物缺陷图像。本申请通过采用注意力机制以及多尺度特征融合网络结构,可以有效抑制下采样导致的信息丢失,提高工业品微小缺陷检测的识别率,另外,增加小目标检测层,能够更加准确检测出工业品的微小缺陷,有利于机器视觉缺

基于多光谱分光成像的表面缺陷自动光学检测系统及方法.pdf
本发明属于图像处理相关技术领域,并具体公开了基于多光谱分光成像的表面缺陷自动光学检测系统及方法。该系统包括硬件单元和软件单元,其中硬件单元中的滤光模块用于对待检产品表面的原始光线进行过滤获得过滤光线;分光采集模块用于获得两幅原始图像;软件单元中多光谱分光成像模块用于调节滤光模块的组成以获得预设数量的原始图像;多图像融合检测模块用于对原始图像进行缺陷检测,获得待检产品的表面缺陷;最后利用分类标注模块对表面缺陷进行分类和标注。本发明将颜色信息融入到检测过程中,从根本上提高缺陷检测所需要的信息量,同时融入分光成

偏振光源、表面缺陷检测方法和装置.pdf
本发明提供了一种操作方便且能有效抑制高反光材料产品表面的强反光干扰的表面缺陷检测方法、表面缺陷检测装置及偏振光源。本发明设置偏振光源和表面缺陷检测装置,利用光的偏振特性消除高反光物体的镜面反射,但保留表面缺陷带来的散射光,通过成像模组获得若干偏振图像,再将这些偏振图像融合为一张包含有所有缺陷信息的图像,对图像进行缺陷检测算法分析计算,即得到该待测区域的缺陷检测结果;本发明采用偏振光高角度照明,从根本上解决了高反光的问题,因为光的偏振特性可以有效消除高反光物体的镜面反射,而无法消除表面缺陷带来的散射光,从而
基于机器视觉的真皮表面缺陷检测系统及其检测方法.pdf
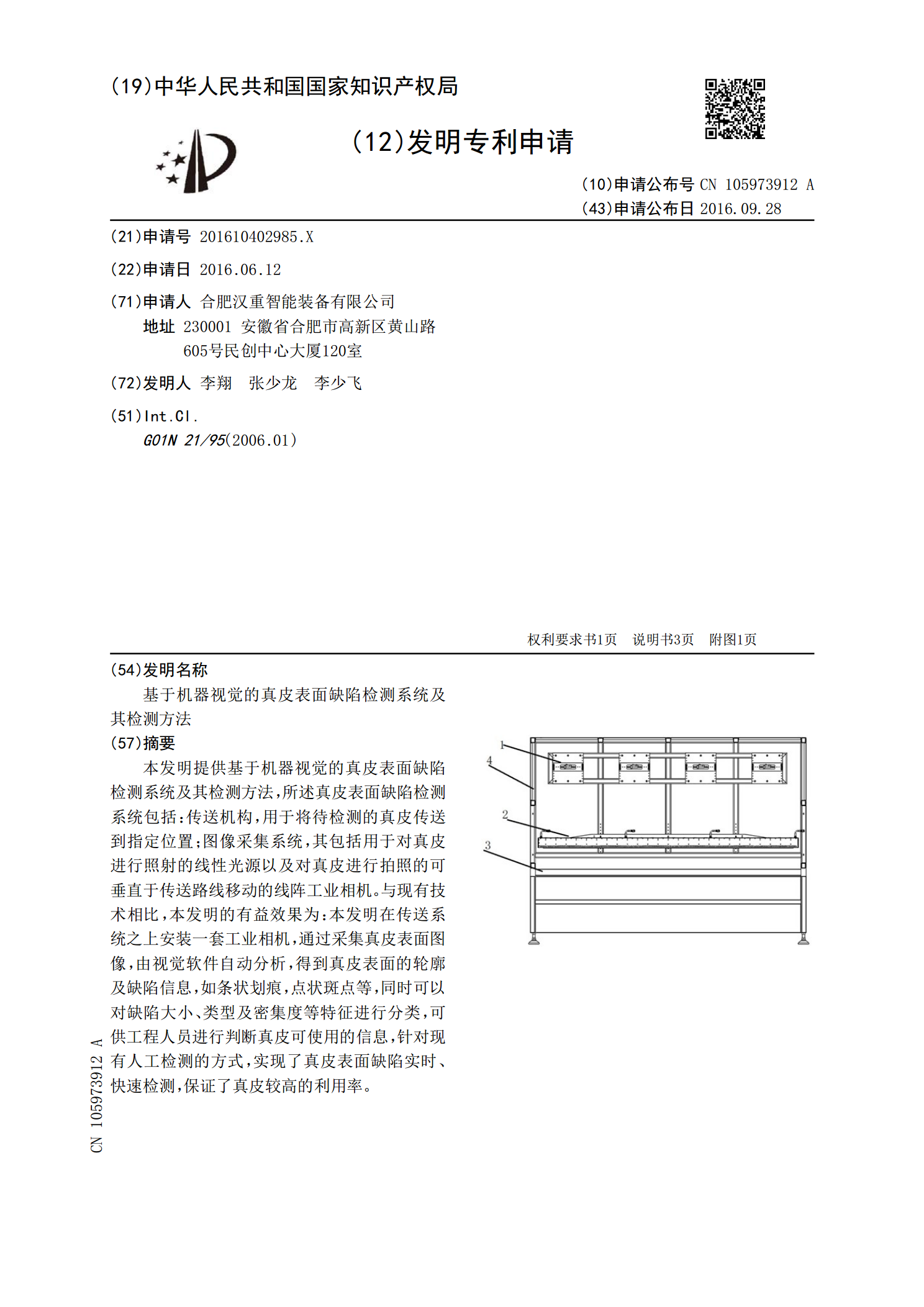
本发明提供基于机器视觉的真皮表面缺陷检测系统及其检测方法,所述真皮表面缺陷检测系统包括:传送机构,用于将待检测的真皮传送到指定位置;图像采集系统,其包括用于对真皮进行照射的线性光源以及对真皮进行拍照的可垂直于传送路线移动的线阵工业相机。与现有技术相比,本发明的有益效果为:本发明在传送系统之上安装一套工业相机,通过采集真皮表面图像,由视觉软件自动分析,得到真皮表面的轮廓及缺陷信息,如条状划痕,点状斑点等,同时可以对缺陷大小、类型及密集度等特征进行分类,可供工程人员进行判断真皮可使用的信息,针对现有人工检测的