
物品搬运操纵器.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物品搬运操纵器.pdf
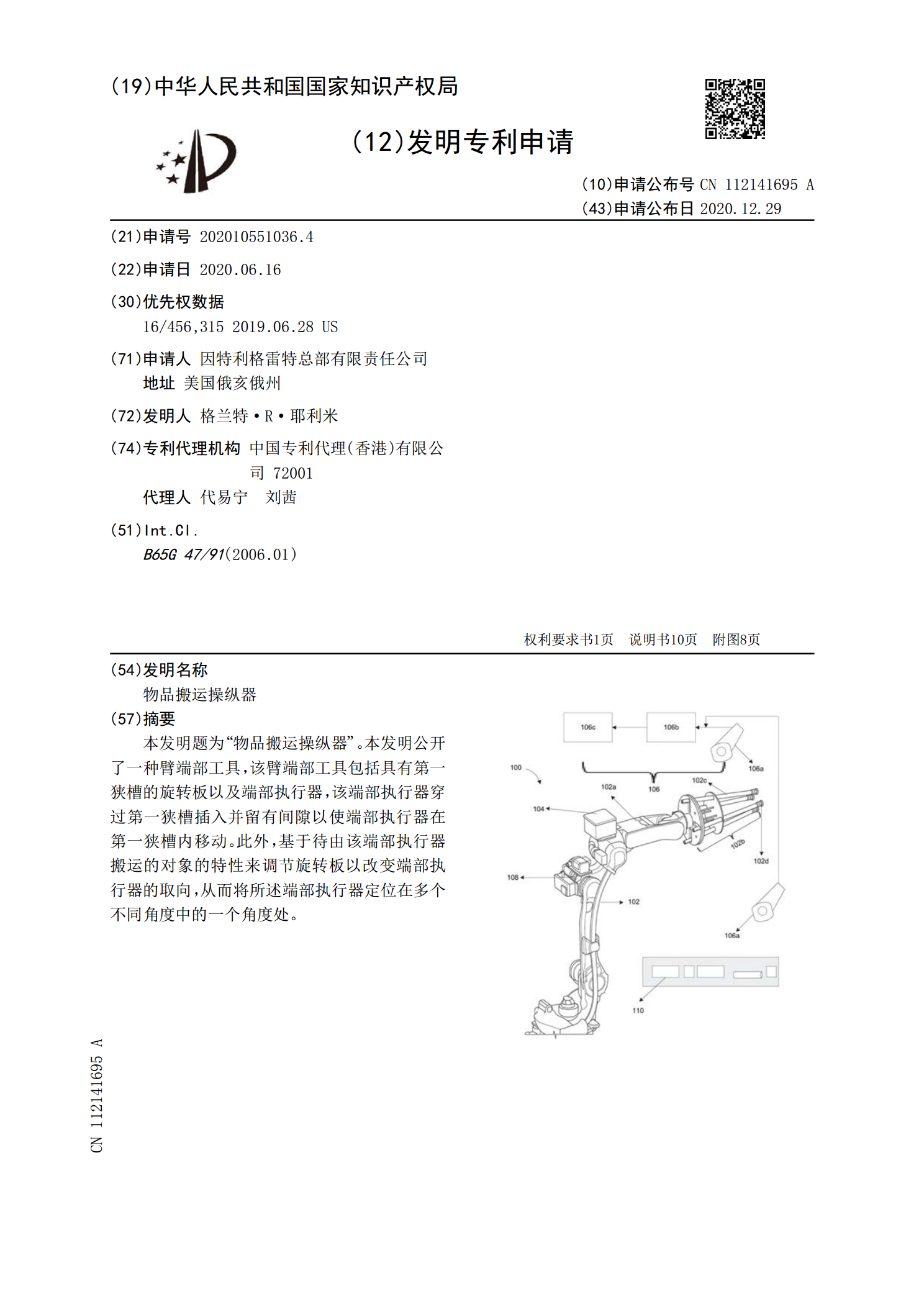
本发明题为“物品搬运操纵器”。本发明公开了一种臂端部工具,该臂端部工具包括具有第一狭槽的旋转板以及端部执行器,该端部执行器穿过第一狭槽插入并留有间隙以使端部执行器在第一狭槽内移动。此外,基于待由该端部执行器搬运的对象的特性来调节旋转板以改变端部执行器的取向,从而将所述端部执行器定位在多个不同角度中的一个角度处。

物品搬运操纵器.pdf
本发明公开了一种机械手操纵器系统,其包括:视觉系统,以传输指示待由机械手操纵器系统搬运的对象的特性的输入数据;和臂端部工具。臂端部工具包括:具有角形狭槽的旋转板;端部执行器,所述端部执行器穿过角形狭槽插入并留有间隙以使端部执行器在角形狭槽内移动;定位在端部执行器的一端与旋转板之间的支撑板,其中所述端部执行器通过在支撑板中的孔插入;和可通信地联接到视觉系统的控制器。该控制器被配置为:基于从视觉系统接收到的输入数据来调节旋转板以改变端部执行器相对于旋转板的平面的取向,从而将端部执行器定位在多个不同角度中的一个
物品搬运设备.pdf
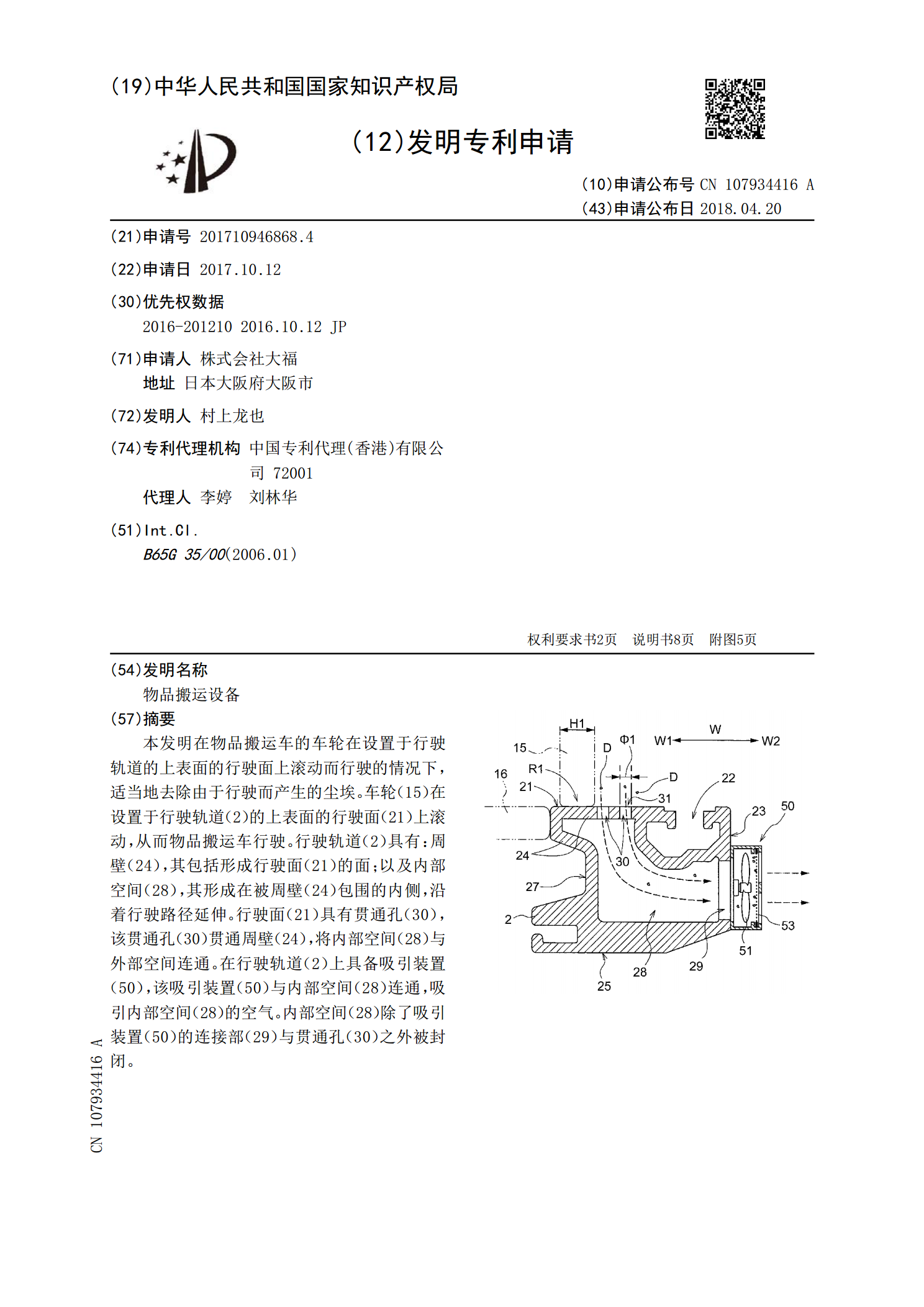
本发明在物品搬运车的车轮在设置于行驶轨道的上表面的行驶面上滚动而行驶的情况下,适当地去除由于行驶而产生的尘埃。车轮(15)在设置于行驶轨道(2)的上表面的行驶面(21)上滚动,从而物品搬运车行驶。行驶轨道(2)具有:周壁(24),其包括形成行驶面(21)的面;以及内部空间(28),其形成在被周壁(24)包围的内侧,沿着行驶路径延伸。行驶面(21)具有贯通孔(30),该贯通孔(30)贯通周壁(24),将内部空间(28)与外部空间连通。在行驶轨道(2)上具备吸引装置(50),该吸引装置(50)与内部空间(28
物品搬运设备.pdf
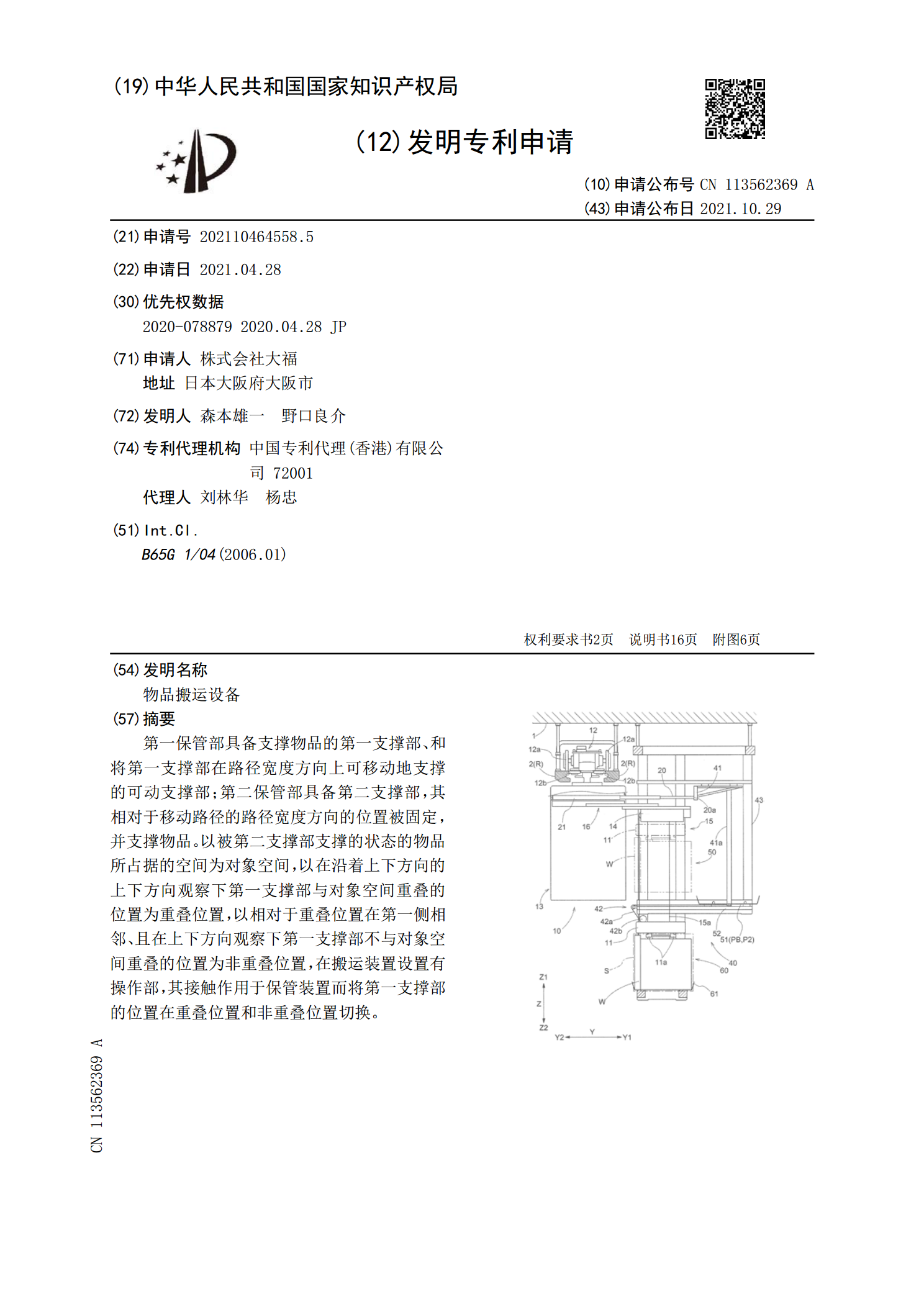
第一保管部具备支撑物品的第一支撑部、和将第一支撑部在路径宽度方向上可移动地支撑的可动支撑部;第二保管部具备第二支撑部,其相对于移动路径的路径宽度方向的位置被固定,并支撑物品。以被第二支撑部支撑的状态的物品所占据的空间为对象空间,以在沿着上下方向的上下方向观察下第一支撑部与对象空间重叠的位置为重叠位置,以相对于重叠位置在第一侧相邻、且在上下方向观察下第一支撑部不与对象空间重叠的位置为非重叠位置,在搬运装置设置有操作部,其接触作用于保管装置而将第一支撑部的位置在重叠位置和非重叠位置切换。
物品搬运装置.pdf
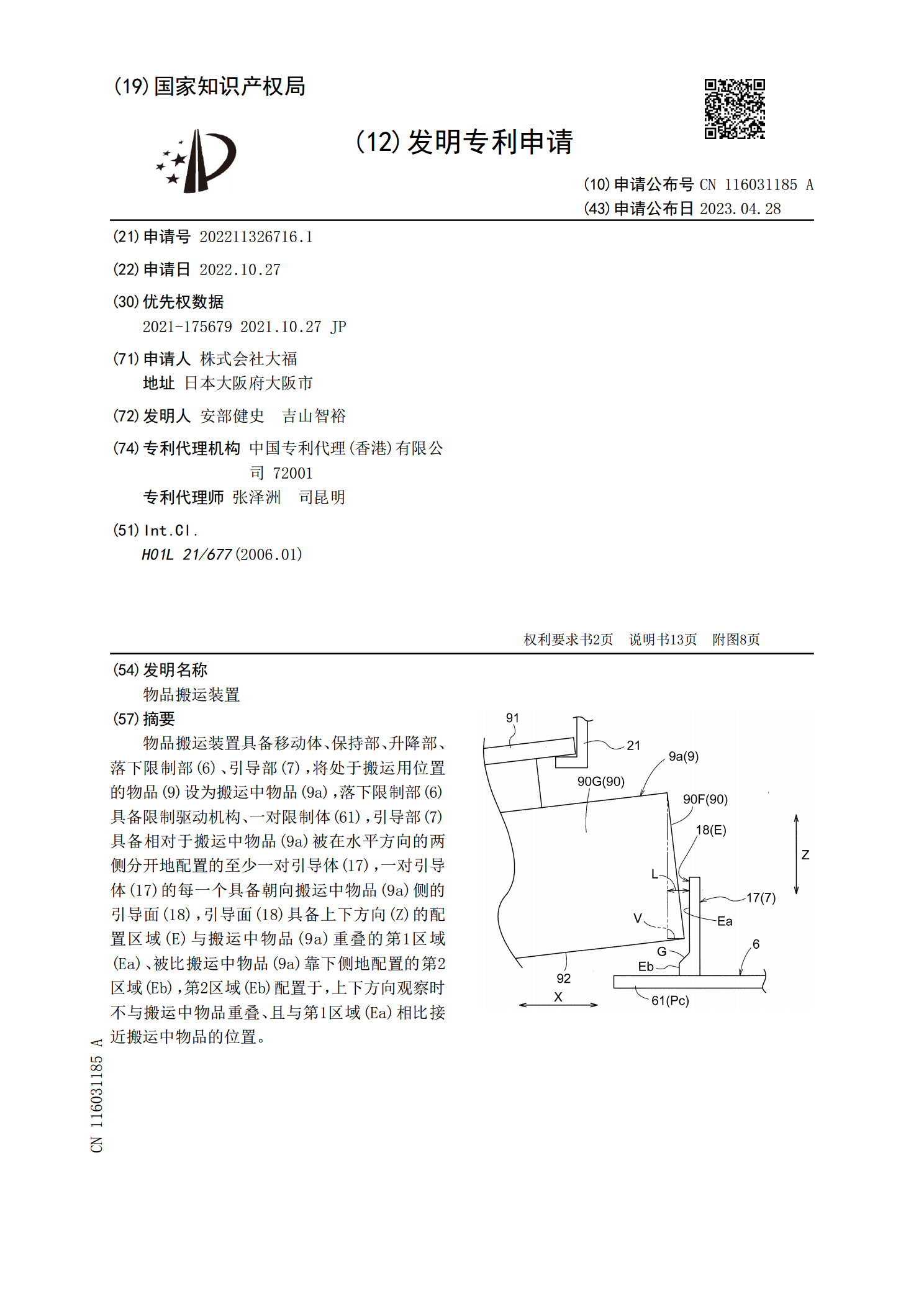
物品搬运装置具备移动体、保持部、升降部、落下限制部(6)、引导部(7),将处于搬运用位置的物品(9)设为搬运中物品(9a),落下限制部(6)具备限制驱动机构、一对限制体(61),引导部(7)具备相对于搬运中物品(9a)被在水平方向的两侧分开地配置的至少一对引导体(17),一对引导体(17)的每一个具备朝向搬运中物品(9a)侧的引导面(18),引导面(18)具备上下方向(Z)的配置区域(E)与搬运中物品(9a)重叠的第1区域(Ea)、被比搬运中物品(9a)靠下侧地配置的第2区域(Eb),第2区域(Eb)配置