
单目视觉自主巡检图像采集方法、装置及电力巡检无人机.pdf

书錦****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单目视觉自主巡检图像采集方法、装置及电力巡检无人机.pdf
本发明公开了单目视觉自主巡检图像采集方法、装置及电力巡检无人机。该方法包括:根据预先获取的分区规划航线数据,及从导航定位模块获取的实时位置数据,控制电力巡检无人机依次在航线内各预定航点停留,其中,航线内包括M个预定航点,在第i个预定航点视野内包括有N

一种电力巡检无人机图像采集识别装置.pdf
本发明属于无人机技术领域,具体涉及一种电力巡检无人机图像采集识别装置,包括无人机本体、固定隔板、封堵机构、牵引机构、置换组件、电动推杆和蓄电池组,无人机本体的内部安装有图像采集组件,固定隔板将无人机本体的内部分隔为第一腔室和第二腔室,封堵机构设置于第二腔室的内部,牵引机构的两端均与封堵机构固定连接,置换组件与图像采集组件的一侧固定连接,电动推杆的输出端与图像采集组件的一侧固定连接,蓄电池组通过置换组件与牵引机构电性连接。本发明能够在无人机本体执行完任务后将图像采集组件收纳到无人机本体内部,结合封堵组件的作

电力巡检图像缺陷识别方法和系统、电力巡检无人机.pdf
本发明公开了一种电力巡检图像缺陷识别方法,包括:创建并且级联目标检测网络和多个分类网络;获取若干帧巡检图像样本,对巡检图像样本中的目标进行标注,生成训练样本集;采用训练样本集对级联网络进行训练,其中,每一网络层的量化参数与其所在网络层的量化级数和量化的范围相关;采用训练好的级联网络对新获取的巡检图像中的缺陷进行识别。本发明能够针对电网杆塔及架空线路的运维,给出了一种有效的FPGA机载识别系统,相应的量化函数可以确保不同网络层的不同通道均能得到合适的量化,最大限度地保留网络的精度;通过级联目标检测网络和分类
一种无人机电力线巡检装置及其巡检方法.pdf
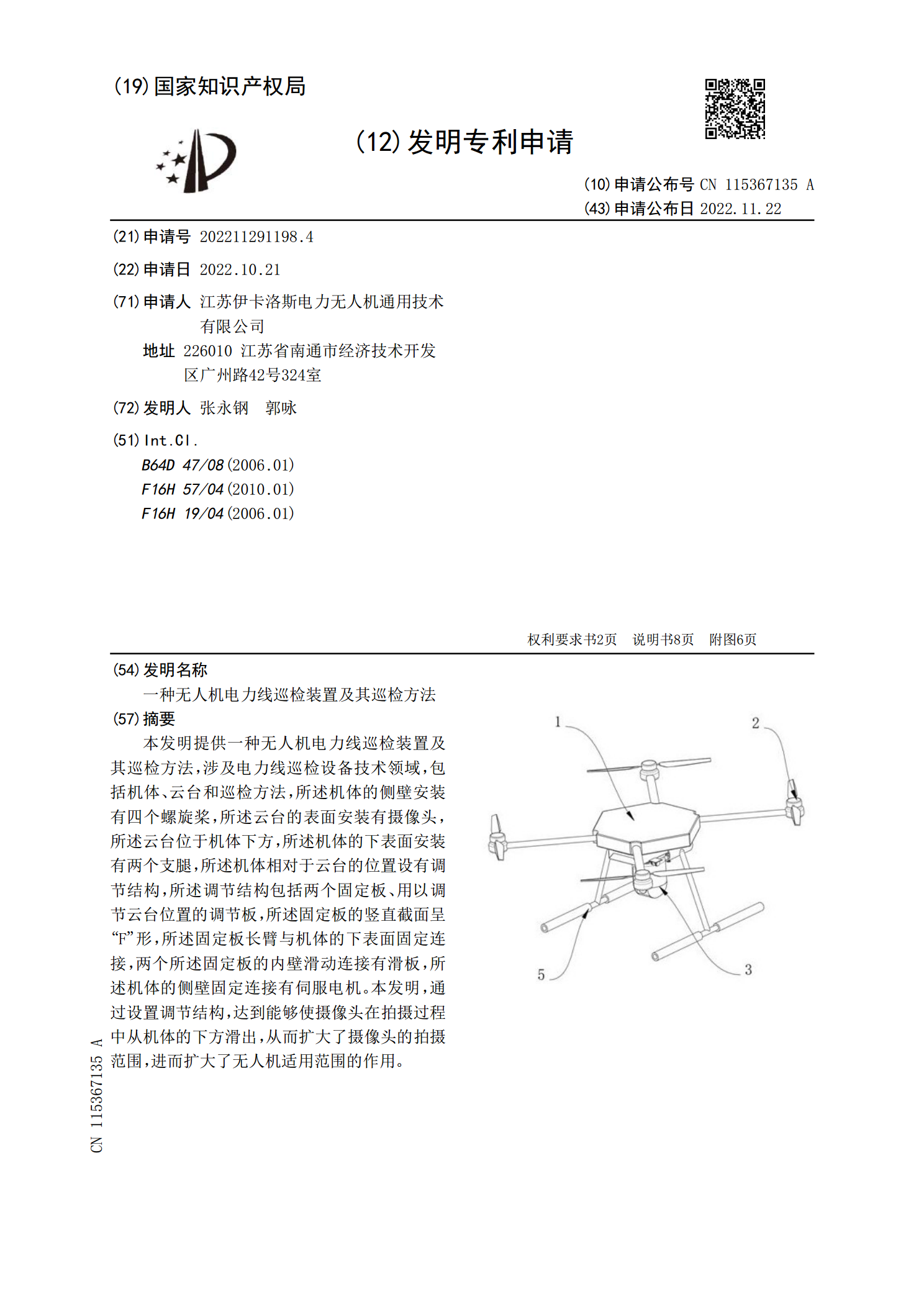
本发明提供一种无人机电力线巡检装置及其巡检方法,涉及电力线巡检设备技术领域,包括机体、云台和巡检方法,所述机体的侧壁安装有四个螺旋桨,所述云台的表面安装有摄像头,所述云台位于机体下方,所述机体的下表面安装有两个支腿,所述机体相对于云台的位置设有调节结构,所述调节结构包括两个固定板、用以调节云台位置的调节板,所述固定板的竖直截面呈“F”形,所述固定板长臂与机体的下表面固定连接,两个所述固定板的内壁滑动连接有滑板,所述机体的侧壁固定连接有伺服电机。本发明,通过设置调节结构,达到能够使摄像头在拍摄过程中从机体的

一种无人机电力线巡检装置及其巡检方法.pdf
本发明公开了一种无人机电力线巡检装置及其巡检方法。高压输电线路需要定期进行巡查和维护,以防止故障和安全隐患。本发明一种无人机电力线巡检装置,包括无人机主体、电力线夹持机构和取电检测模块。电力线夹持机构包括固定底盘和两个单侧夹持组件。单侧夹持组件包括夹持舵机、连接架和阻尼夹持器。阻尼夹持器包括夹持器驱动组件、夹持架和两个单夹爪。夹持器驱动组件包括线缆推块、复位弹簧、连接铰轴和连杆。取电检测模块包括电动推杆、升降底座、辅助杆、让位弹簧、翻转杆、支撑杆和无线取电器。本发明能够停靠在电力线上延长续航时间,由电力线