
一种多功能工业机器人机械手.pdf

映雁****魔王


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多功能工业机器人机械手.pdf
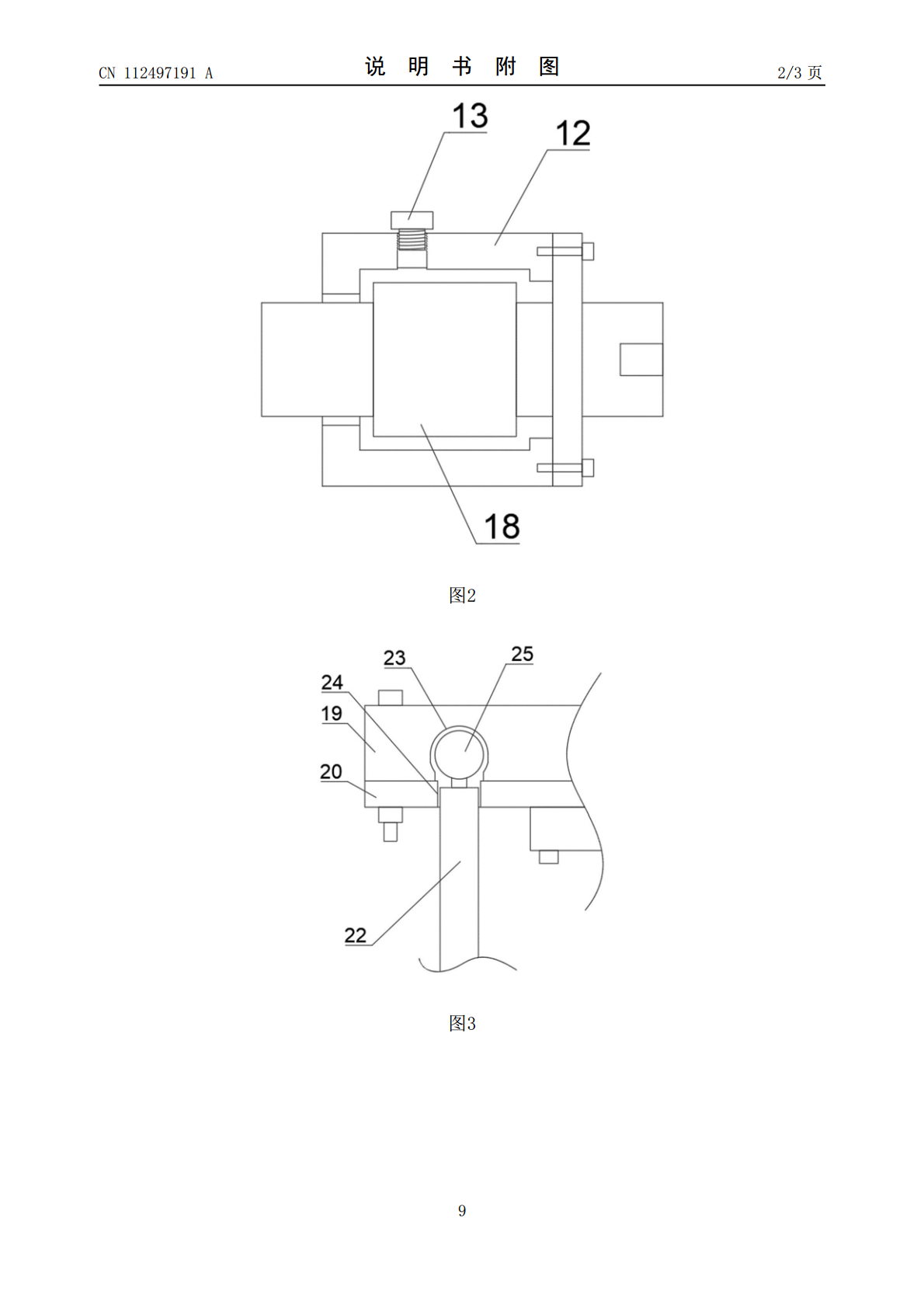
本发明公开了一种多功能工业机器人机械手,包括下拼接板、固定块、第一转动电机、第二转动电机和V形块,所述下拼接板顶部焊接有固定块,所述固定块顶部开设有限位槽且限位槽内套设有插块,所述插块顶部连接有安装板,所述安装板顶部一端通过安装座安装有第一转动电机,所述安装板顶部另一端通过预留槽安装有水冷排,所述第一转动电机的动力输出端连接有机械手转动臂,所述机械手转动臂端部一侧焊接有转槽。本发明机械手能在夹持较重物体或夹持较轻物体的情景下进行使用,可以进行区分切换,机械手在拆卸时较为简单,机械手在切换时的稳定效果佳,转
一种多功能工业机械手臂.pdf
本发明公开了一种多功能工业机械手臂,包括操作仓,所述操作仓下部设有操作底板,所述操作底板下部设有履带轮装置,所述操作仓是由固定安装在操作仓内部的操作座椅、开在操作仓侧表面上部的操作方孔、安装在操作方孔上的钢化玻璃、安装在操作仓内部侧表面下部的操作装置、安装在操作仓侧表面外部的机械手臂装置共同构成的,所述操作仓一侧表面设有喷洒装置。本发明的有益效果是,结构简单,实用性强。
一种多功能工业机器人.pdf
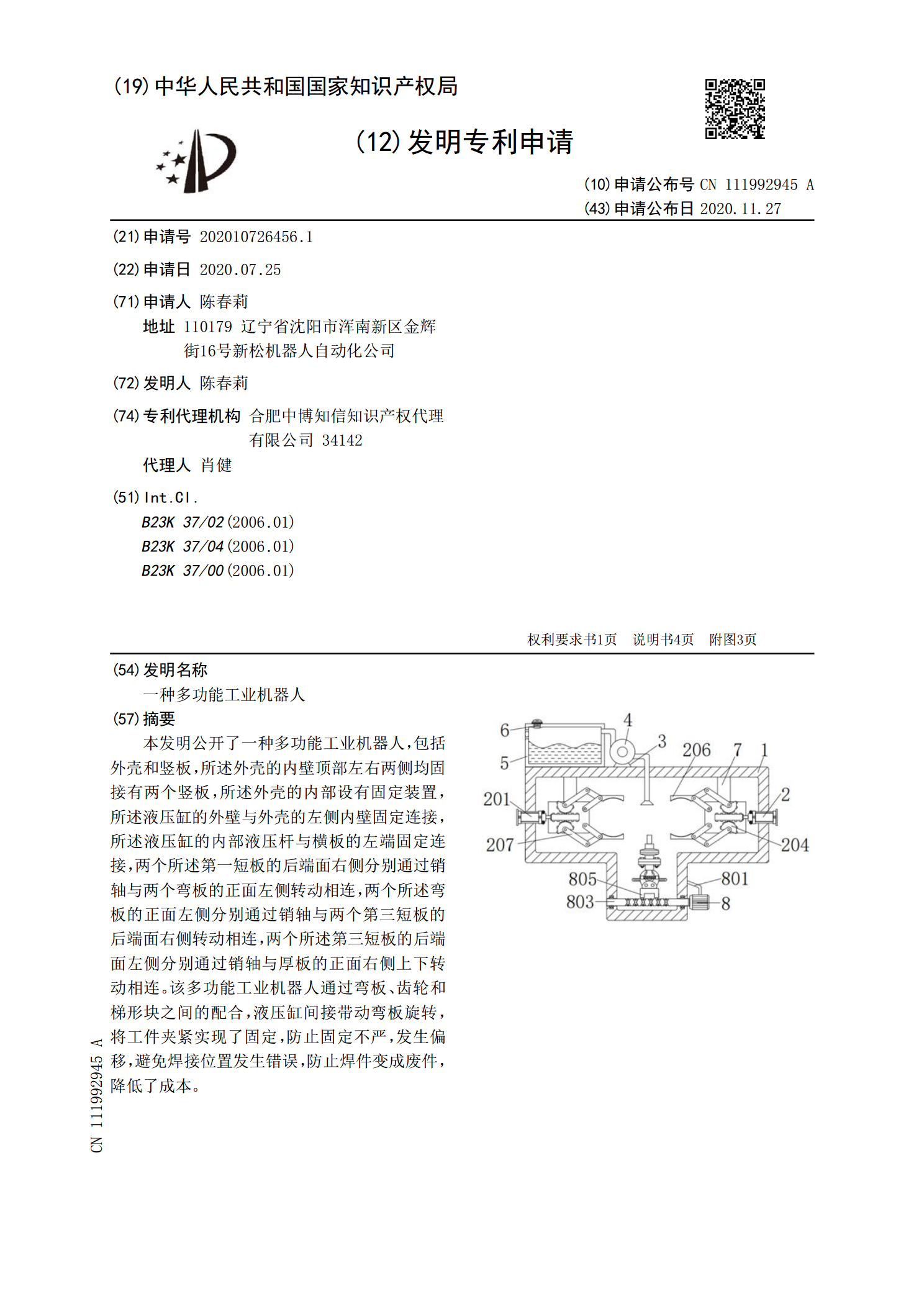
本发明公开了一种多功能工业机器人,包括外壳和竖板,所述外壳的内壁顶部左右两侧均固接有两个竖板,所述外壳的内部设有固定装置,所述液压缸的外壁与外壳的左侧内壁固定连接,所述液压缸的内部液压杆与横板的左端固定连接,两个所述第一短板的后端面右侧分别通过销轴与两个弯板的正面左侧转动相连,两个所述弯板的正面左侧分别通过销轴与两个第三短板的后端面右侧转动相连,两个所述第三短板的后端面左侧分别通过销轴与厚板的正面右侧上下转动相连。该多功能工业机器人通过弯板、齿轮和梯形块之间的配合,液压缸间接带动弯板旋转,将工件夹紧实现了
一种多功能工业搬运机器人.pdf
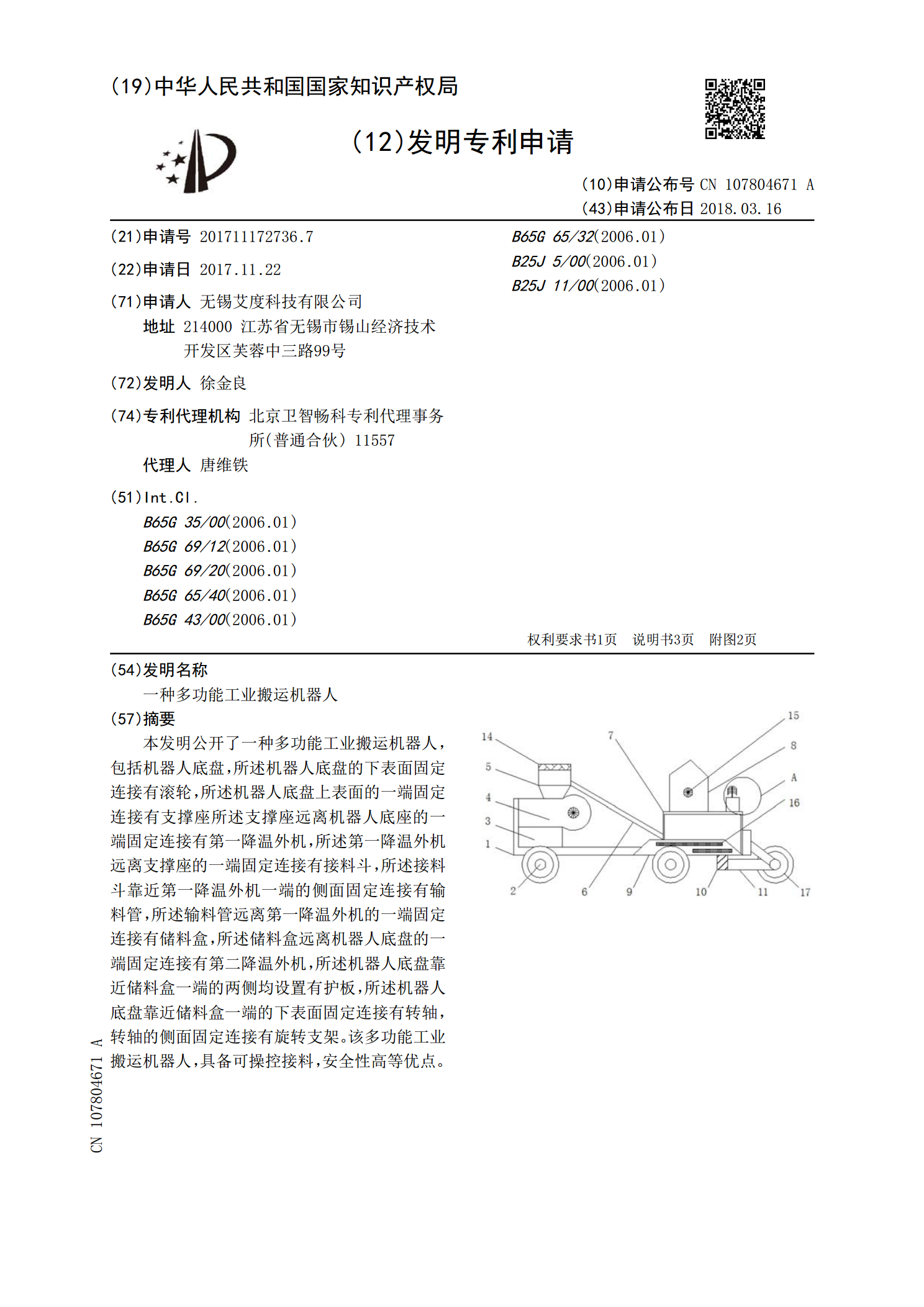
本发明公开了一种多功能工业搬运机器人,包括机器人底盘,所述机器人底盘的下表面固定连接有滚轮,所述机器人底盘上表面的一端固定连接有支撑座所述支撑座远离机器人底座的一端固定连接有第一降温外机,所述第一降温外机远离支撑座的一端固定连接有接料斗,所述接料斗靠近第一降温外机一端的侧面固定连接有输料管,所述输料管远离第一降温外机的一端固定连接有储料盒,所述储料盒远离机器人底盘的一端固定连接有第二降温外机,所述机器人底盘靠近储料盒一端的两侧均设置有护板,所述机器人底盘靠近储料盒一端的下表面固定连接有转轴,转轴的侧面固定
一种工业机器人用机械手结构.pdf
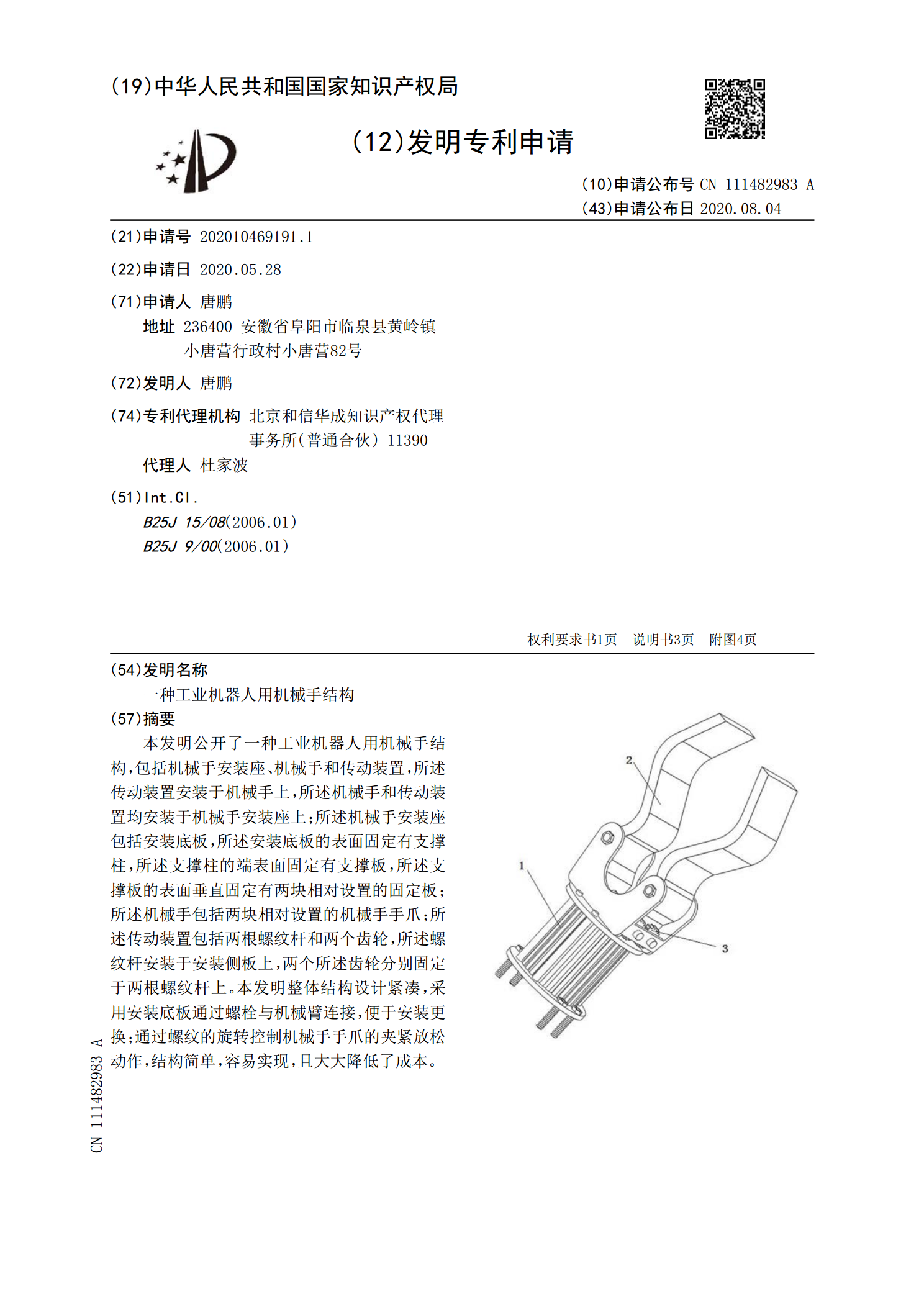
本发明公开了一种工业机器人用机械手结构,包括机械手安装座、机械手和传动装置,所述传动装置安装于机械手上,所述机械手和传动装置均安装于机械手安装座上;所述机械手安装座包括安装底板,所述安装底板的表面固定有支撑柱,所述支撑柱的端表面固定有支撑板,所述支撑板的表面垂直固定有两块相对设置的固定板;所述机械手包括两块相对设置的机械手手爪;所述传动装置包括两根螺纹杆和两个齿轮,所述螺纹杆安装于安装侧板上,两个所述齿轮分别固定于两根螺纹杆上。本发明整体结构设计紧凑,采用安装底板通过螺栓与机械臂连接,便于安装更换;通过螺