
一种可弯曲伸长的柔性蛇形臂机械结构.pdf

宏硕****mo


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可弯曲伸长的柔性蛇形臂机械结构.pdf
本发明公开了一种可弯曲伸长的柔性蛇形臂机械结构,它由三节组成,总长度为1m,分别命名为第一节、第二节、第三节,每节长度为300mm。其中,第一节包括三根d4×1200mm弹性杆(置于四周)、一根d4×1200mm弹性杆(置于中心)、四个M4六角螺母、圆盘1‑1、圆盘1‑2以及两个固定架1;同样地,第二节包括三根d4×900mm弹性杆、三个M4六角螺母、圆盘2‑1、圆盘2‑2以及两个固定架2;第三节包括三根d4×600mm弹性杆、三个M4六角螺母、圆盘3‑1、圆盘3‑2以及两个固定架3。第一节的每根弹性杆与

具有大弯曲角的机器人蛇形柔性臂.doc
具有大弯曲角的机器人蛇形柔性臂摘要:蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来...蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来实现。主传动机构是在等角度传动机构的基础上对结构作了某些创新后而
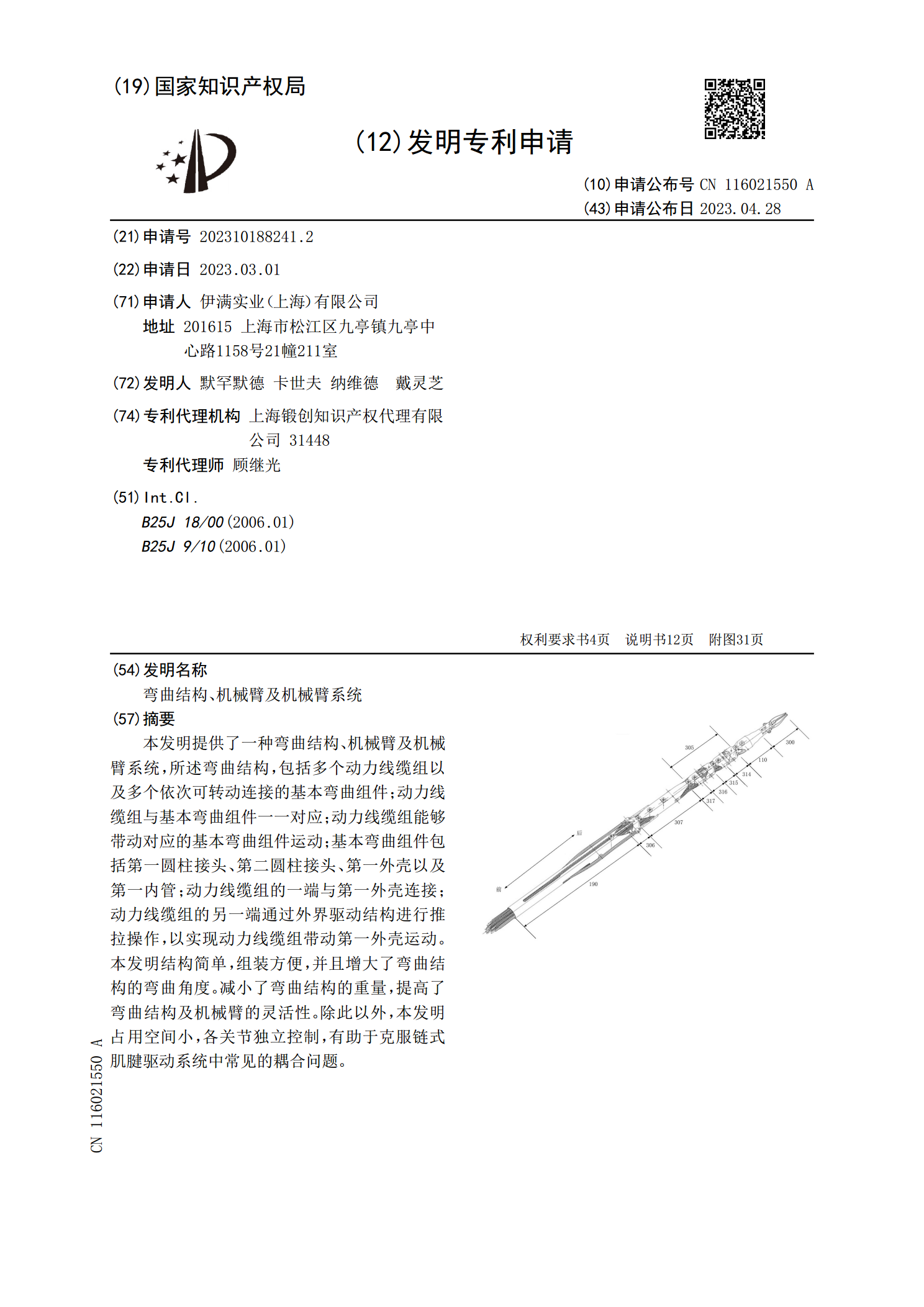
弯曲结构、机械臂及机械臂系统.pdf
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116021550A(43)申请公布日2023.04.28(21)申请号202310188241.2(22)申请日2023.03.01(71)申请人伊满实业(上海)有限公司地址201615上海市松江区九亭镇九亭中心路1158号21幢211室(72)发明人默罕默德卡世夫纳维德戴灵芝(74)专利代理机构上海锻创知识产权代理有限公司31448专利代理师顾继光(51)Int.Cl.B25J18/00(2006.01)B25J9/10(2006.01)
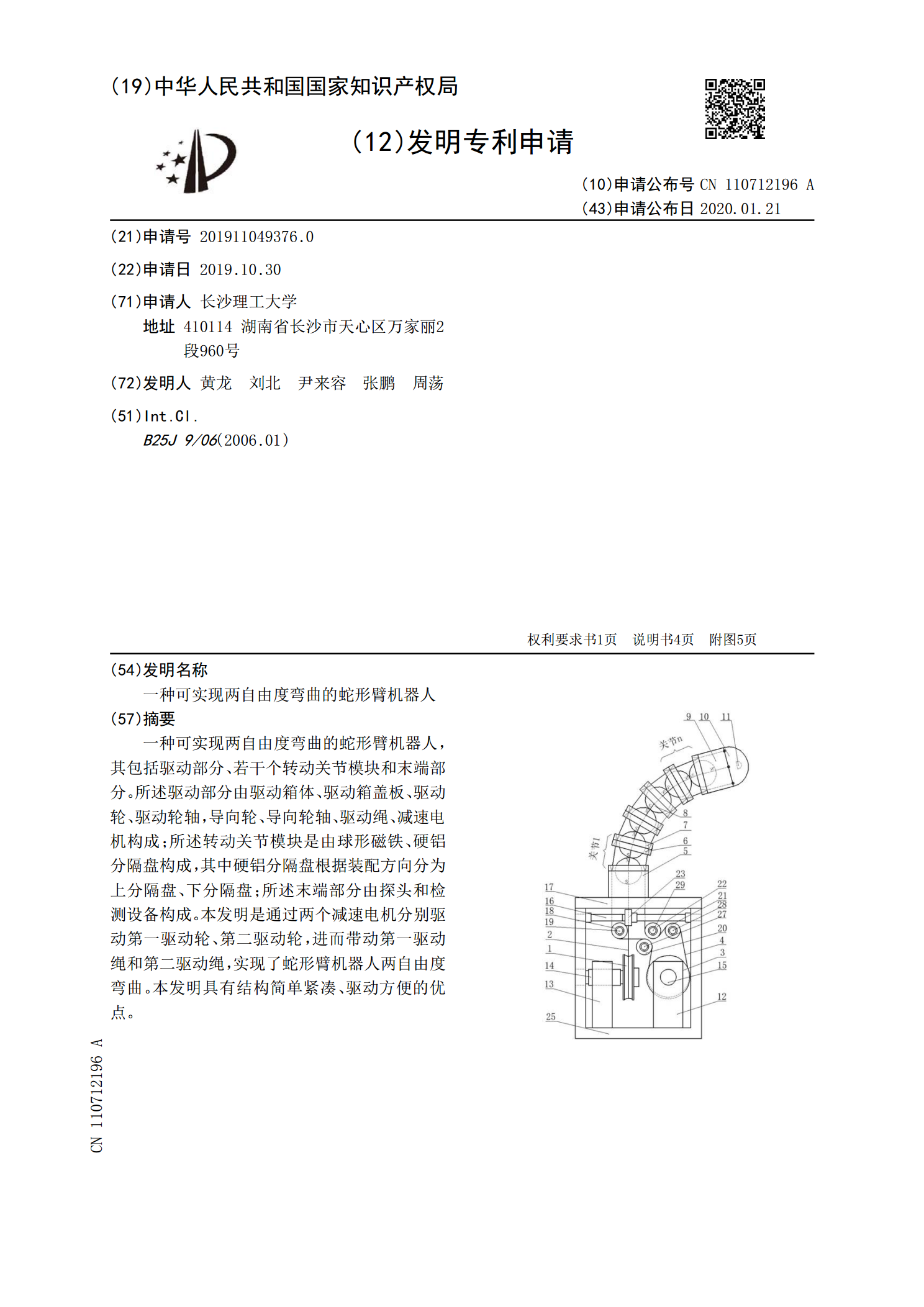
一种可实现两自由度弯曲的蛇形臂机器人.pdf
一种可实现两自由度弯曲的蛇形臂机器人,其包括驱动部分、若干个转动关节模块和末端部分。所述驱动部分由驱动箱体、驱动箱盖板、驱动轮、驱动轮轴,导向轮、导向轮轴、驱动绳、减速电机构成;所述转动关节模块是由球形磁铁、硬铝分隔盘构成,其中硬铝分隔盘根据装配方向分为上分隔盘、下分隔盘;所述末端部分由探头和检测设备构成。本发明是通过两个减速电机分别驱动第一驱动轮、第二驱动轮,进而带动第一驱动绳和第二驱动绳,实现了蛇形臂机器人两自由度弯曲。本发明具有结构简单紧凑、驱动方便的优点。
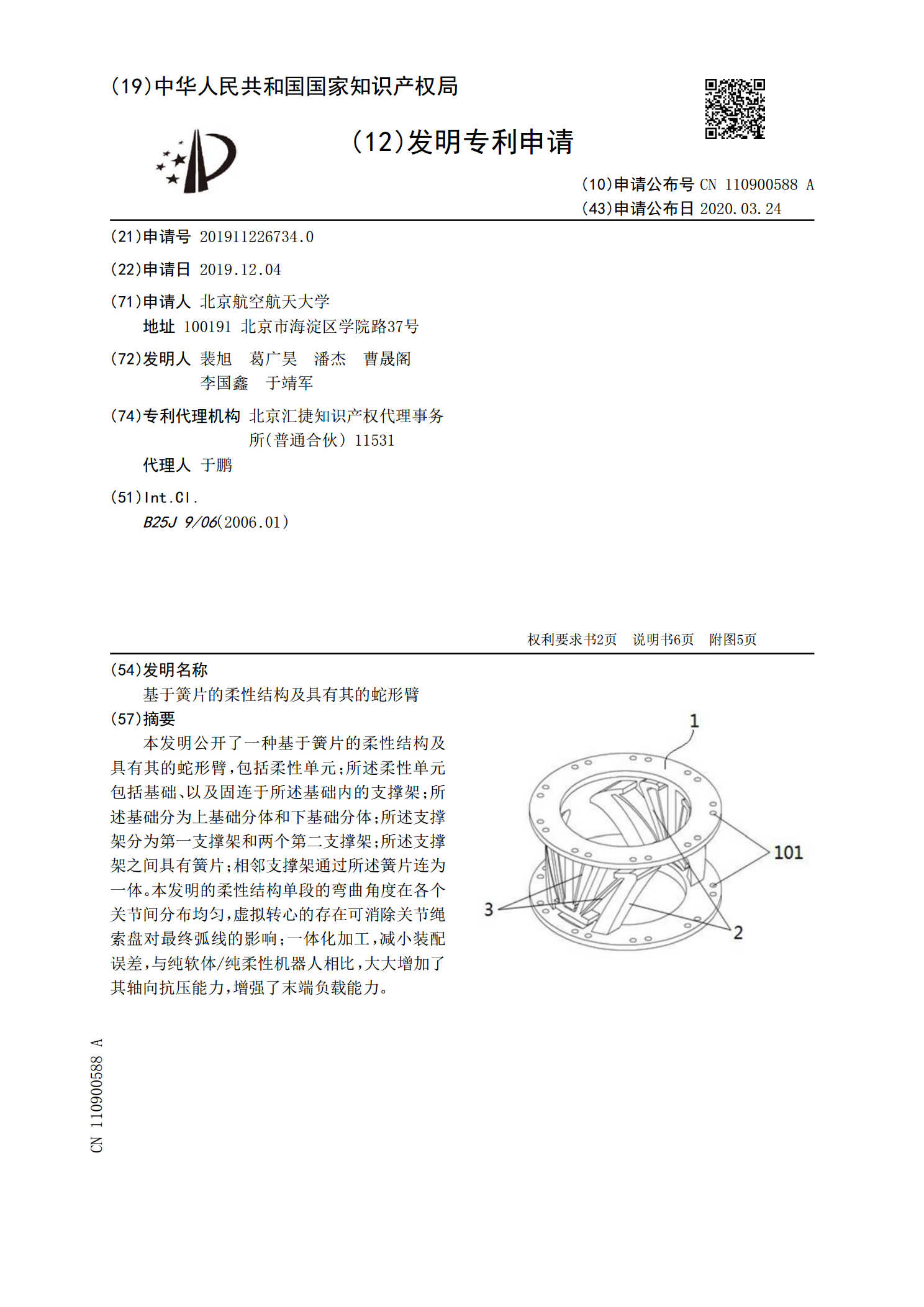
基于簧片的柔性结构及具有其的蛇形臂.pdf
本发明公开了一种基于簧片的柔性结构及具有其的蛇形臂,包括柔性单元;所述柔性单元包括基础、以及固连于所述基础内的支撑架;所述基础分为上基础分体和下基础分体;所述支撑架分为第一支撑架和两个第二支撑架;所述支撑架之间具有簧片;相邻支撑架通过所述簧片连为一体。本发明的柔性结构单段的弯曲角度在各个关节间分布均匀,虚拟转心的存在可消除关节绳索盘对最终弧线的影响;一体化加工,减小装配误差,与纯软体/纯柔性机器人相比,大大增加了其轴向抗压能力,增强了末端负载能力。