
一种可实现两自由度弯曲的蛇形臂机器人.pdf

白真****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可实现两自由度弯曲的蛇形臂机器人.pdf
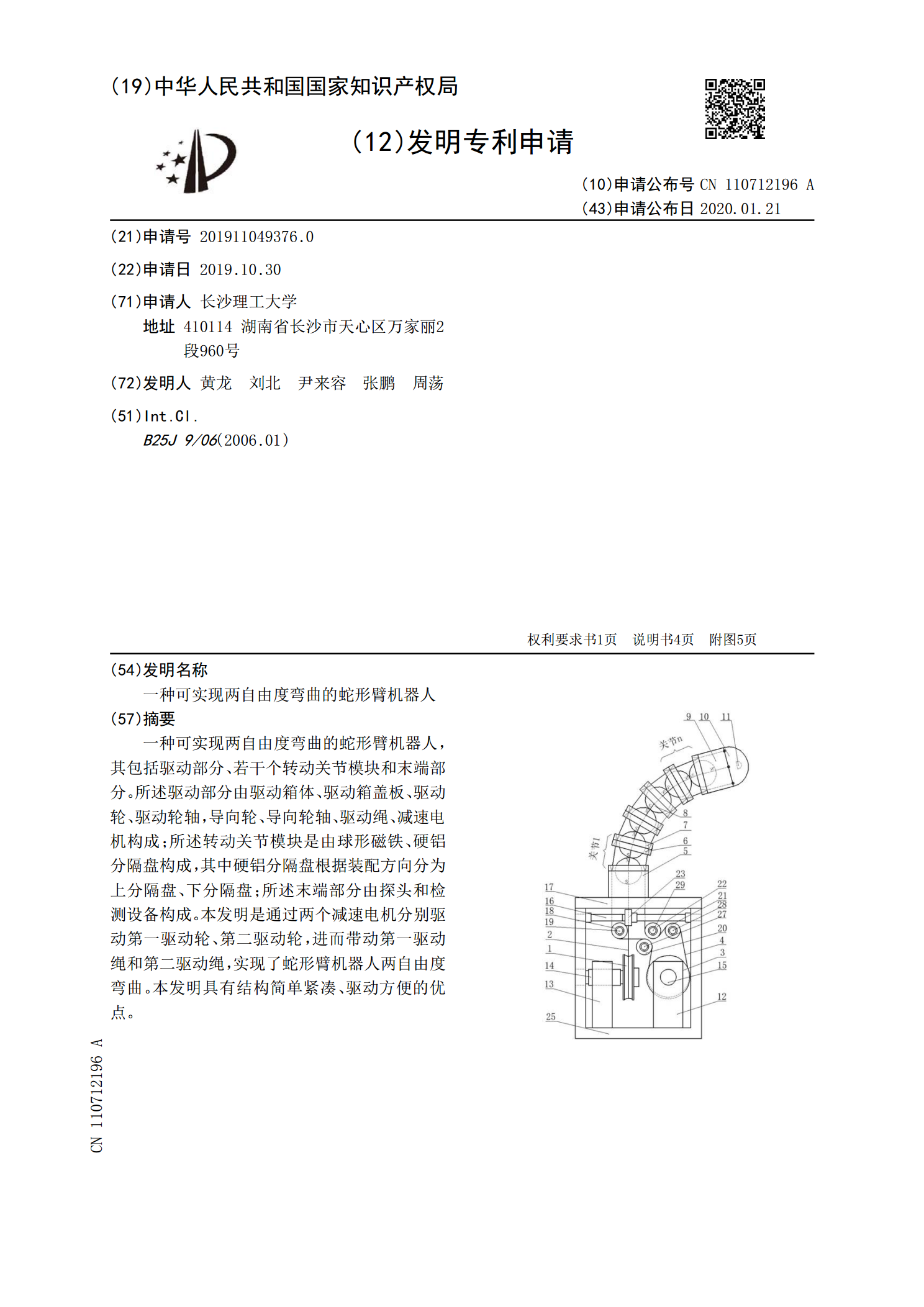
一种可实现两自由度弯曲的蛇形臂机器人,其包括驱动部分、若干个转动关节模块和末端部分。所述驱动部分由驱动箱体、驱动箱盖板、驱动轮、驱动轮轴,导向轮、导向轮轴、驱动绳、减速电机构成;所述转动关节模块是由球形磁铁、硬铝分隔盘构成,其中硬铝分隔盘根据装配方向分为上分隔盘、下分隔盘;所述末端部分由探头和检测设备构成。本发明是通过两个减速电机分别驱动第一驱动轮、第二驱动轮,进而带动第一驱动绳和第二驱动绳,实现了蛇形臂机器人两自由度弯曲。本发明具有结构简单紧凑、驱动方便的优点。

一种可弯曲伸长的柔性蛇形臂机械结构.pdf
本发明公开了一种可弯曲伸长的柔性蛇形臂机械结构,它由三节组成,总长度为1m,分别命名为第一节、第二节、第三节,每节长度为300mm。其中,第一节包括三根d4×1200mm弹性杆(置于四周)、一根d4×1200mm弹性杆(置于中心)、四个M4六角螺母、圆盘1‑1、圆盘1‑2以及两个固定架1;同样地,第二节包括三根d4×900mm弹性杆、三个M4六角螺母、圆盘2‑1、圆盘2‑2以及两个固定架2;第三节包括三根d4×600mm弹性杆、三个M4六角螺母、圆盘3‑1、圆盘3‑2以及两个固定架3。第一节的每根弹性杆与

具有大弯曲角的机器人蛇形柔性臂.doc
具有大弯曲角的机器人蛇形柔性臂摘要:蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来...蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来实现。主传动机构是在等角度传动机构的基础上对结构作了某些创新后而

一种丝驱动蛇形臂机器人.pdf
一种丝驱动蛇形臂机器人,包括:第一减速电机、第二减速电机、第三减速电机、第四减速电机、驱动块外壳、间隔盘、空间连杆、弹簧装置、第一牵引丝、第二牵引丝、第三牵引丝、第四牵引丝、阀、旋转电机、主动轮、传动带、从动环、内牵引丝、摆杆、转动盘、固定盘、软管;其中,所述固定盘内设有入流通道、空腔,所述转动盘内设有喷射通道、喷洒通道、喷洒口,所述喷洒通道与喷洒口连通。
一种多自由度蛇形机械臂的精度补偿方法.pdf
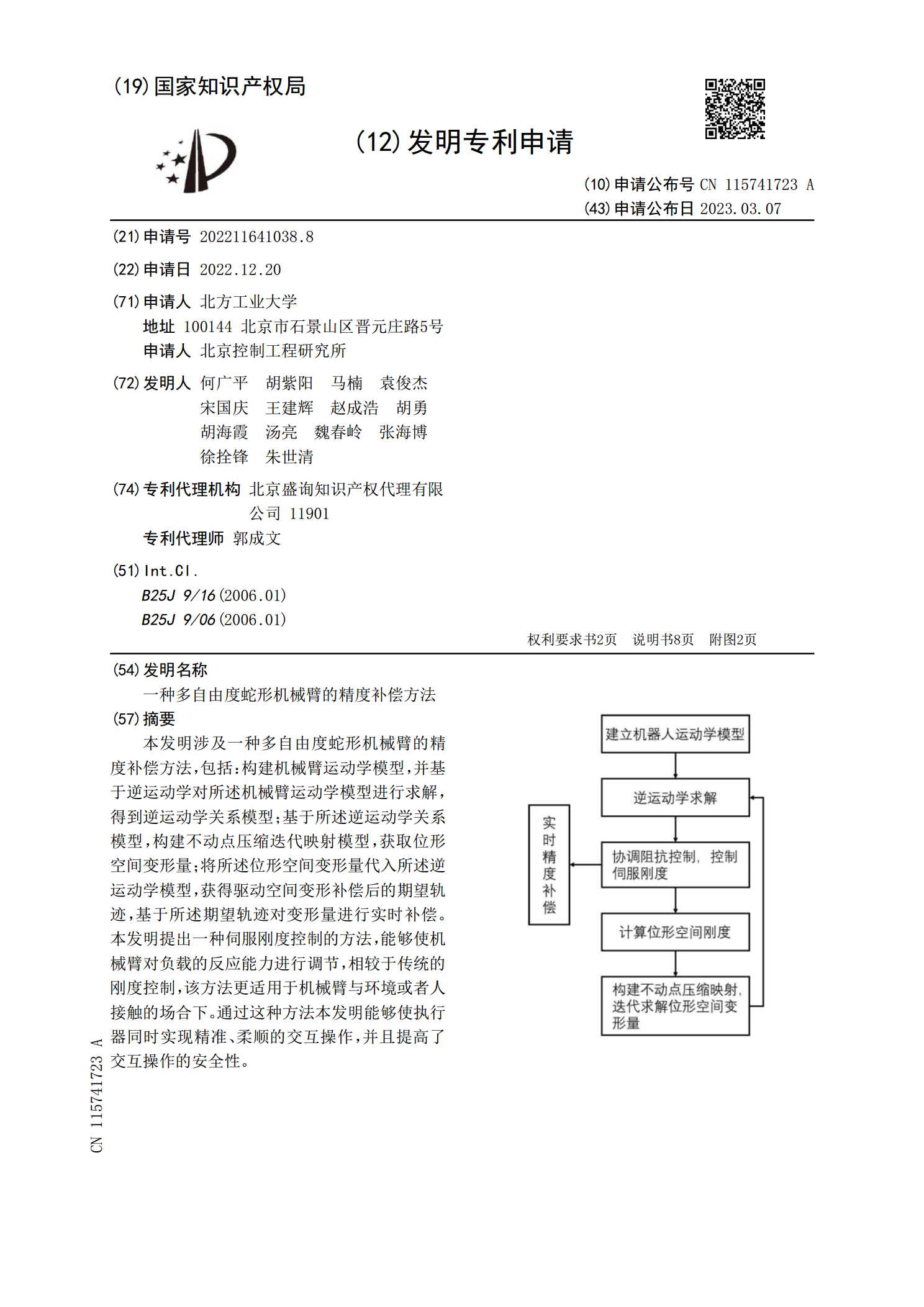
本发明涉及一种多自由度蛇形机械臂的精度补偿方法,包括:构建机械臂运动学模型,并基于逆运动学对所述机械臂运动学模型进行求解,得到逆运动学关系模型;基于所述逆运动学关系模型,构建不动点压缩迭代映射模型,获取位形空间变形量;将所述位形空间变形量代入所述逆运动学模型,获得驱动空间变形补偿后的期望轨迹,基于所述期望轨迹对变形量进行实时补偿。本发明提出一种伺服刚度控制的方法,能够使机械臂对负载的反应能力进行调节,相较于传统的刚度控制,该方法更适用于机械臂与环境或者人接触的场合下。通过这种方法本发明能够使执行器同时实现