
具有大弯曲角的机器人蛇形柔性臂.doc

kp****93


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有大弯曲角的机器人蛇形柔性臂.doc
具有大弯曲角的机器人蛇形柔性臂摘要:蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来...蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来实现。主传动机构是在等角度传动机构的基础上对结构作了某些创新后而

一种可弯曲伸长的柔性蛇形臂机械结构.pdf
本发明公开了一种可弯曲伸长的柔性蛇形臂机械结构,它由三节组成,总长度为1m,分别命名为第一节、第二节、第三节,每节长度为300mm。其中,第一节包括三根d4×1200mm弹性杆(置于四周)、一根d4×1200mm弹性杆(置于中心)、四个M4六角螺母、圆盘1‑1、圆盘1‑2以及两个固定架1;同样地,第二节包括三根d4×900mm弹性杆、三个M4六角螺母、圆盘2‑1、圆盘2‑2以及两个固定架2;第三节包括三根d4×600mm弹性杆、三个M4六角螺母、圆盘3‑1、圆盘3‑2以及两个固定架3。第一节的每根弹性杆与
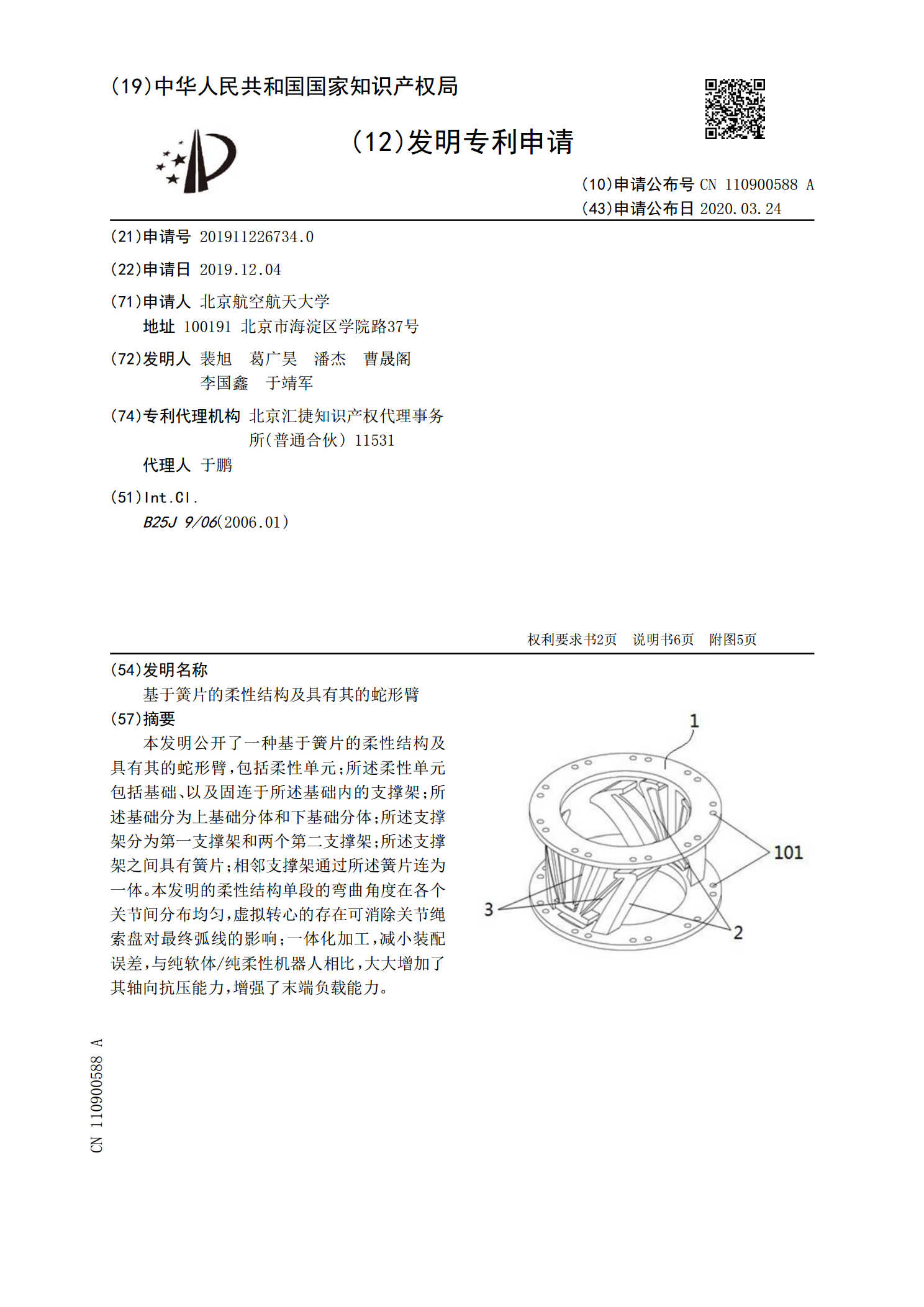
基于簧片的柔性结构及具有其的蛇形臂.pdf
本发明公开了一种基于簧片的柔性结构及具有其的蛇形臂,包括柔性单元;所述柔性单元包括基础、以及固连于所述基础内的支撑架;所述基础分为上基础分体和下基础分体;所述支撑架分为第一支撑架和两个第二支撑架;所述支撑架之间具有簧片;相邻支撑架通过所述簧片连为一体。本发明的柔性结构单段的弯曲角度在各个关节间分布均匀,虚拟转心的存在可消除关节绳索盘对最终弧线的影响;一体化加工,减小装配误差,与纯软体/纯柔性机器人相比,大大增加了其轴向抗压能力,增强了末端负载能力。
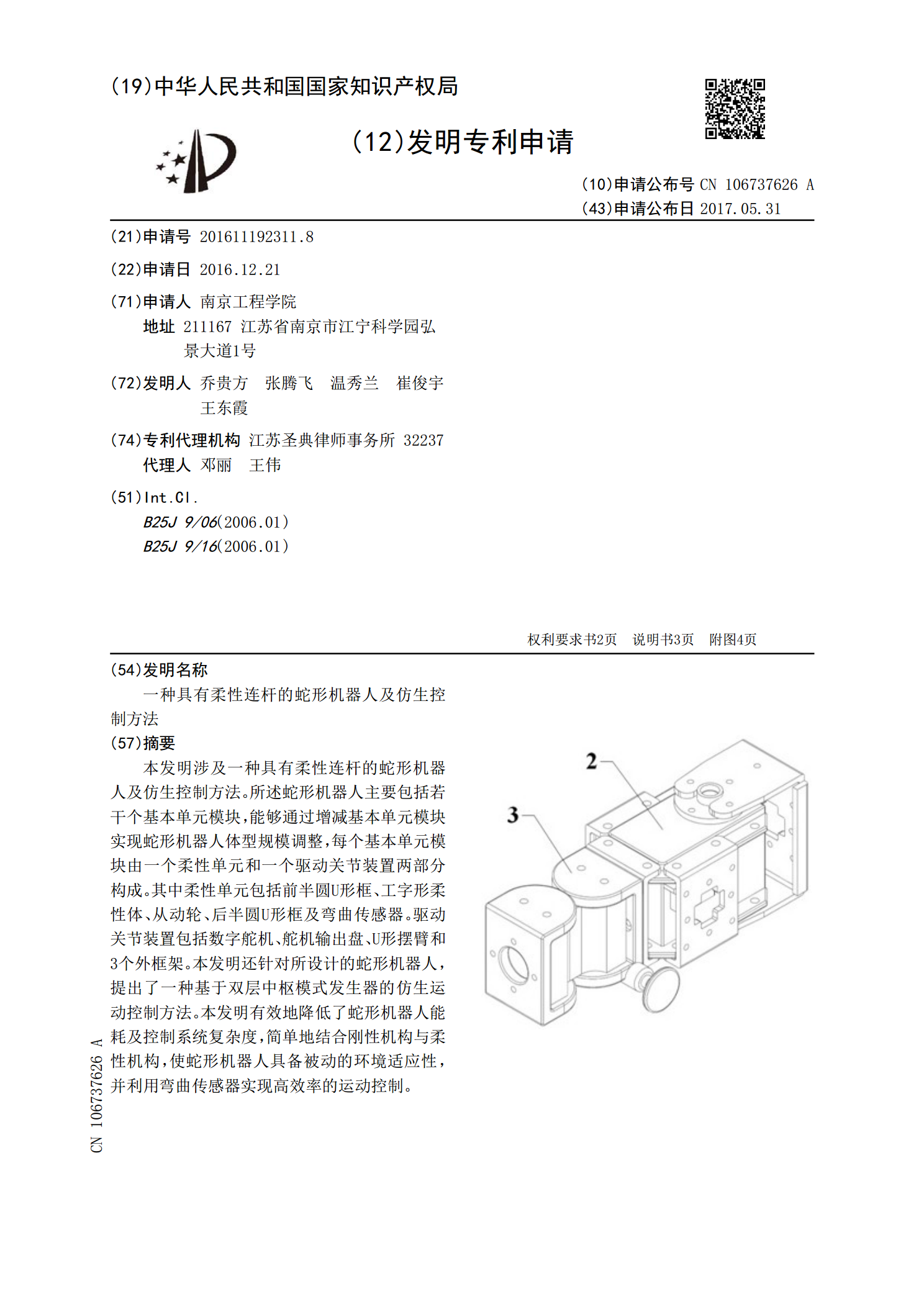
一种具有柔性连杆的蛇形机器人及仿生控制方法.pdf
本发明涉及一种具有柔性连杆的蛇形机器人及仿生控制方法。所述蛇形机器人主要包括若干个基本单元模块,能够通过增减基本单元模块实现蛇形机器人体型规模调整,每个基本单元模块由一个柔性单元和一个驱动关节装置两部分构成。其中柔性单元包括前半圆U形框、工字形柔性体、从动轮、后半圆U形框及弯曲传感器。驱动关节装置包括数字舵机、舵机输出盘、U形摆臂和3个外框架。本发明还针对所设计的蛇形机器人,提出了一种基于双层中枢模式发生器的仿生运动控制方法。本发明有效地降低了蛇形机器人能耗及控制系统复杂度,简单地结合刚性机构与柔性机构,
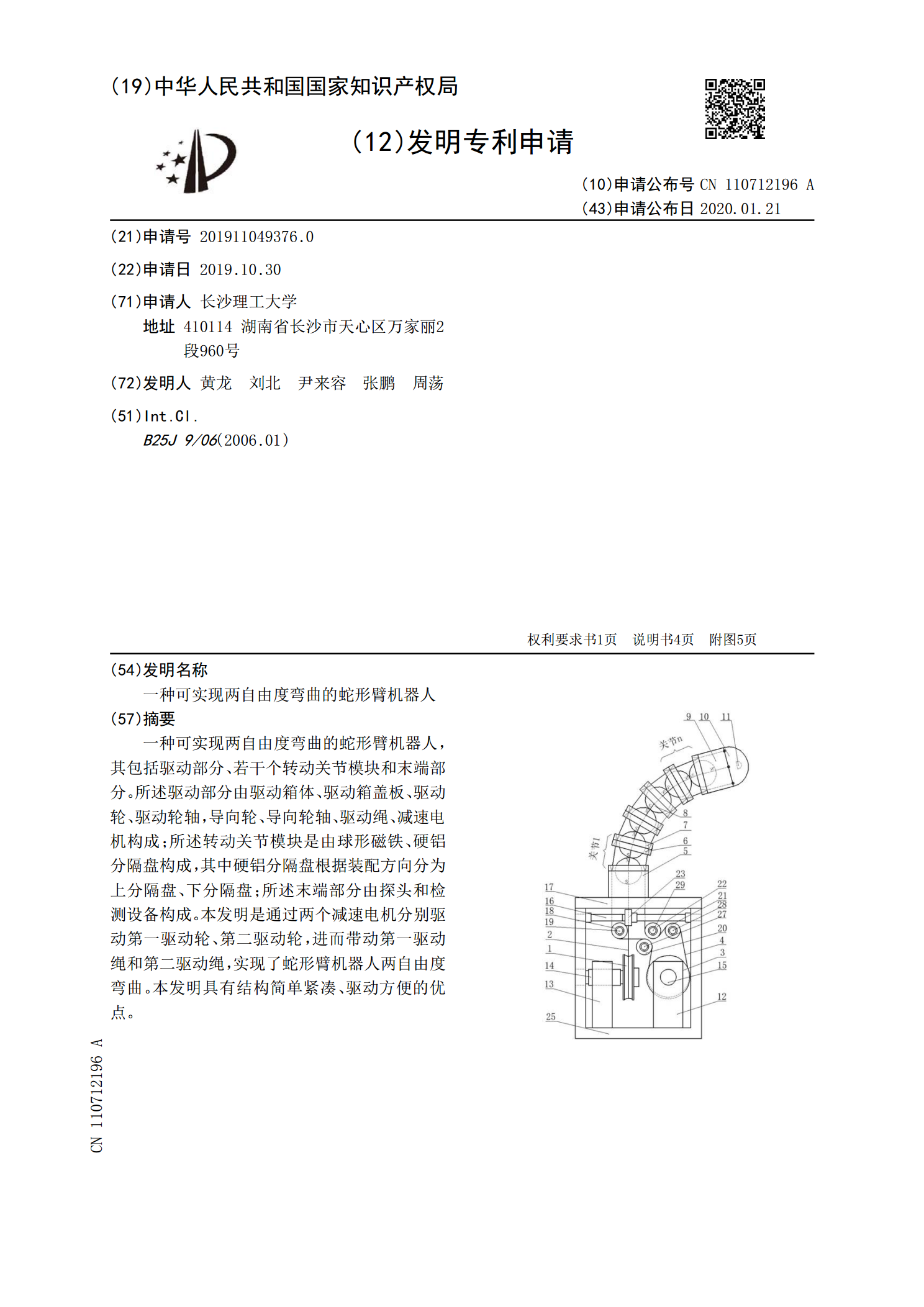
一种可实现两自由度弯曲的蛇形臂机器人.pdf
一种可实现两自由度弯曲的蛇形臂机器人,其包括驱动部分、若干个转动关节模块和末端部分。所述驱动部分由驱动箱体、驱动箱盖板、驱动轮、驱动轮轴,导向轮、导向轮轴、驱动绳、减速电机构成;所述转动关节模块是由球形磁铁、硬铝分隔盘构成,其中硬铝分隔盘根据装配方向分为上分隔盘、下分隔盘;所述末端部分由探头和检测设备构成。本发明是通过两个减速电机分别驱动第一驱动轮、第二驱动轮,进而带动第一驱动绳和第二驱动绳,实现了蛇形臂机器人两自由度弯曲。本发明具有结构简单紧凑、驱动方便的优点。