
一种复杂环境下虹膜跟踪定位方法及系统.pdf

明钰****甜甜

1/8
2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种复杂环境下虹膜跟踪定位方法及系统.pdf
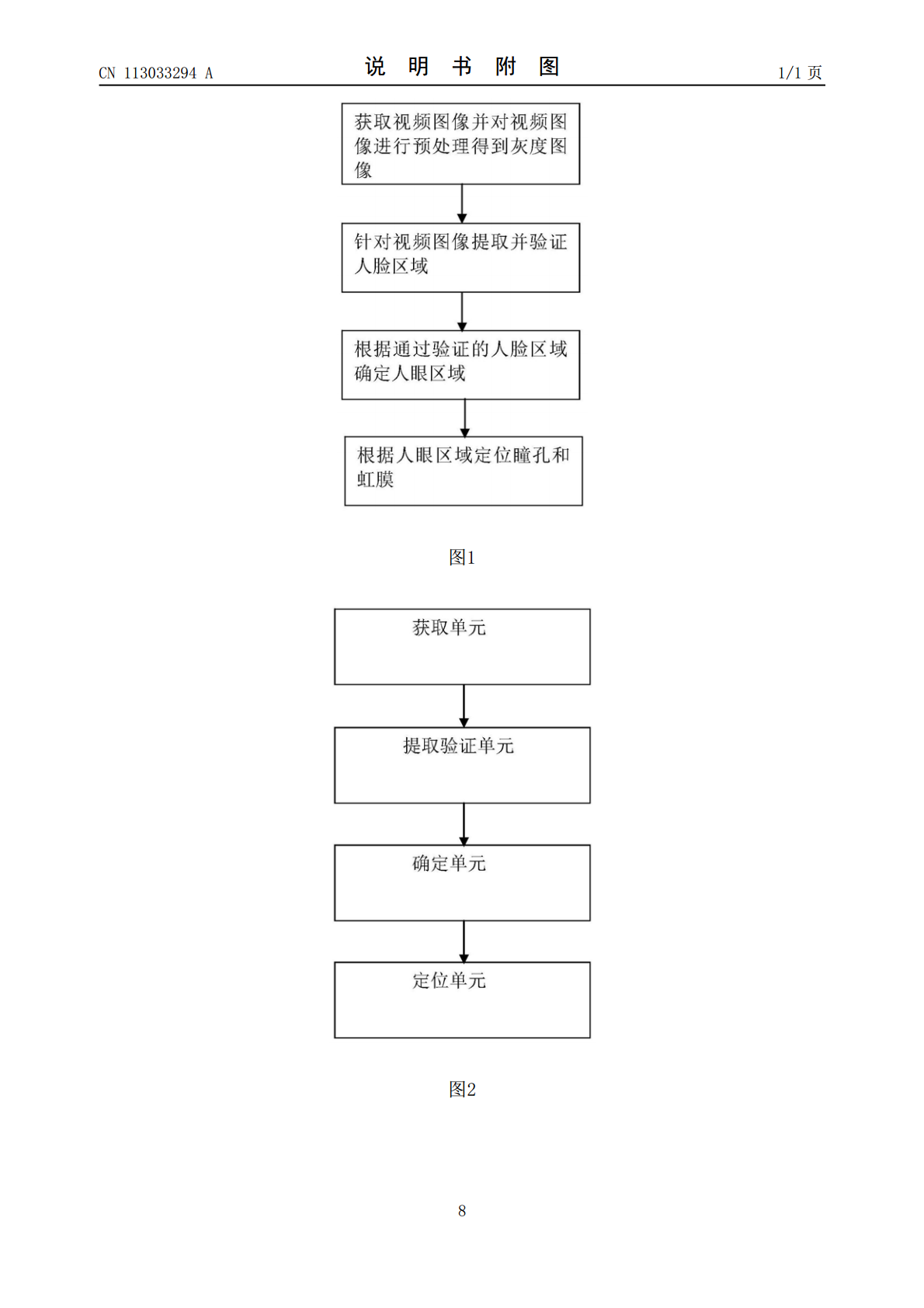
本发明公开了一种复杂环境下虹膜跟踪定位方法及系统,包括获取视频图像并对视频图像进行预处理得到灰度图像;针对视频图像提取并验证人脸区域;根据通过验证的人脸区域确定人眼区域;根据人眼区域定位瞳孔;定位虹膜,本发明通过AdaBoost算法和面积阈值法针对视频图像提取并验证人脸区域,又通过在经过验证的人脸区域中确定人眼区域,进一步缩小虹膜定位的范围,再通过在人眼区域初步定位瞳孔从而更精确地定位虹膜,不仅保留了原图像的重要特征信息而且加快了运算速度。本发明适用于图像检测领域。
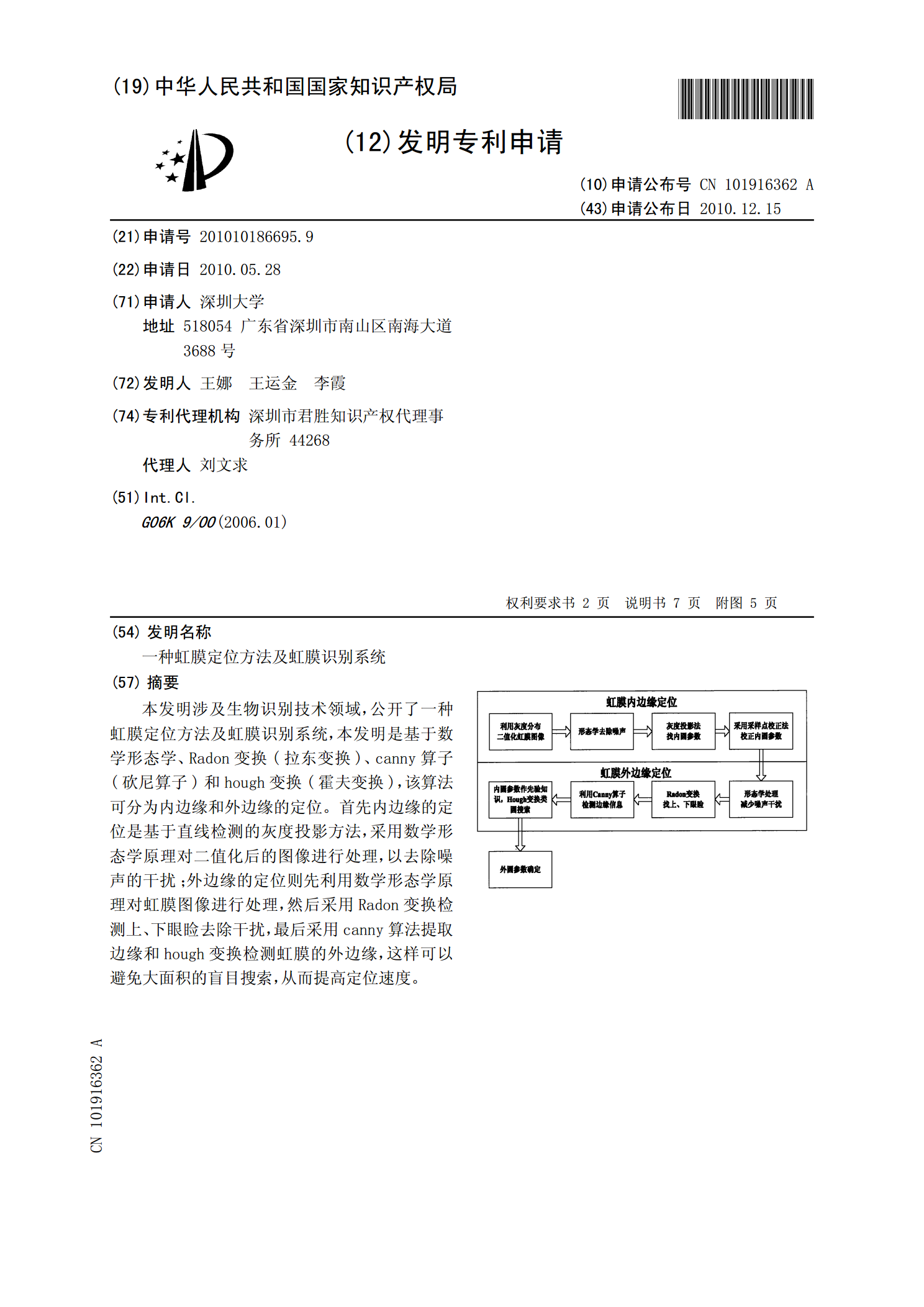
一种虹膜定位方法及虹膜识别系统.pdf
本发明涉及生物识别技术领域,公开了一种虹膜定位方法及虹膜识别系统,本发明是基于数学形态学、Radon变换(拉东变换)、canny算子(砍尼算子)和hough变换(霍夫变换),该算法可分为内边缘和外边缘的定位。首先内边缘的定位是基于直线检测的灰度投影方法,采用数学形态学原理对二值化后的图像进行处理,以去除噪声的干扰;外边缘的定位则先利用数学形态学原理对虹膜图像进行处理,然后采用Radon变换检测上、下眼睑去除干扰,最后采用canny算法提取边缘和hough变换检测虹膜的外边缘,这样可以避免大面积的盲目搜索,
一种挖掘机复杂环境下SLAM建图定位方法、系统及装置.pdf
本公开提供了一种挖掘机复杂环境下SLAM建图定位方法,包括以下步骤:利用激光雷达对挖掘对象进行检测,获取挖掘对象的激光雷达数据;利用深度相机对挖掘对象进行检测,获取挖掘对象的深度图像;在激光雷达与深度相机的重合区域内,将激光雷达采集的激光雷达数据与深度相机采集的深度图像进行坐标系转换,并将激光雷达数据和深度图像进行数据融合,得到挖掘对象的地图。优化了传统ICP的目标函数,从而增加了挖掘机在复杂烟尘环境下的定位准确性,精简了运算量,可以降低驾驶员的作业风险,提高挖掘效率。
一种复杂环境下的多源组合导航定位方法.pdf
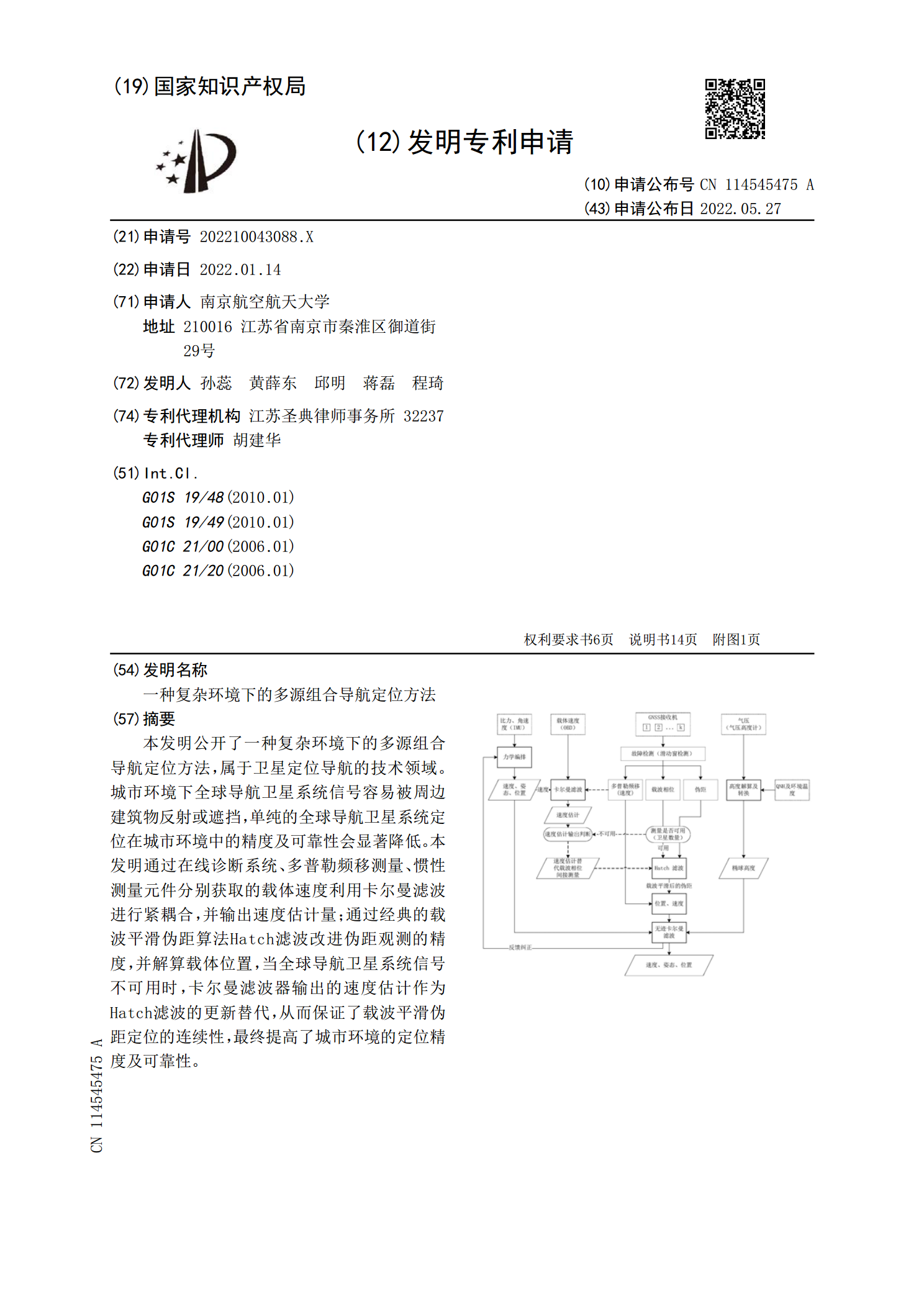
本发明公开了一种复杂环境下的多源组合导航定位方法,属于卫星定位导航的技术领域。城市环境下全球导航卫星系统信号容易被周边建筑物反射或遮挡,单纯的全球导航卫星系统定位在城市环境中的精度及可靠性会显著降低。本发明通过在线诊断系统、多普勒频移测量、惯性测量元件分别获取的载体速度利用卡尔曼滤波进行紧耦合,并输出速度估计量;通过经典的载波平滑伪距算法Hatch滤波改进伪距观测的精度,并解算载体位置,当全球导航卫星系统信号不可用时,卡尔曼滤波器输出的速度估计作为Hatch滤波的更新替代,从而保证了载波平滑伪距定位的连续
一种复杂环境下的QR码检测定位方法.pdf
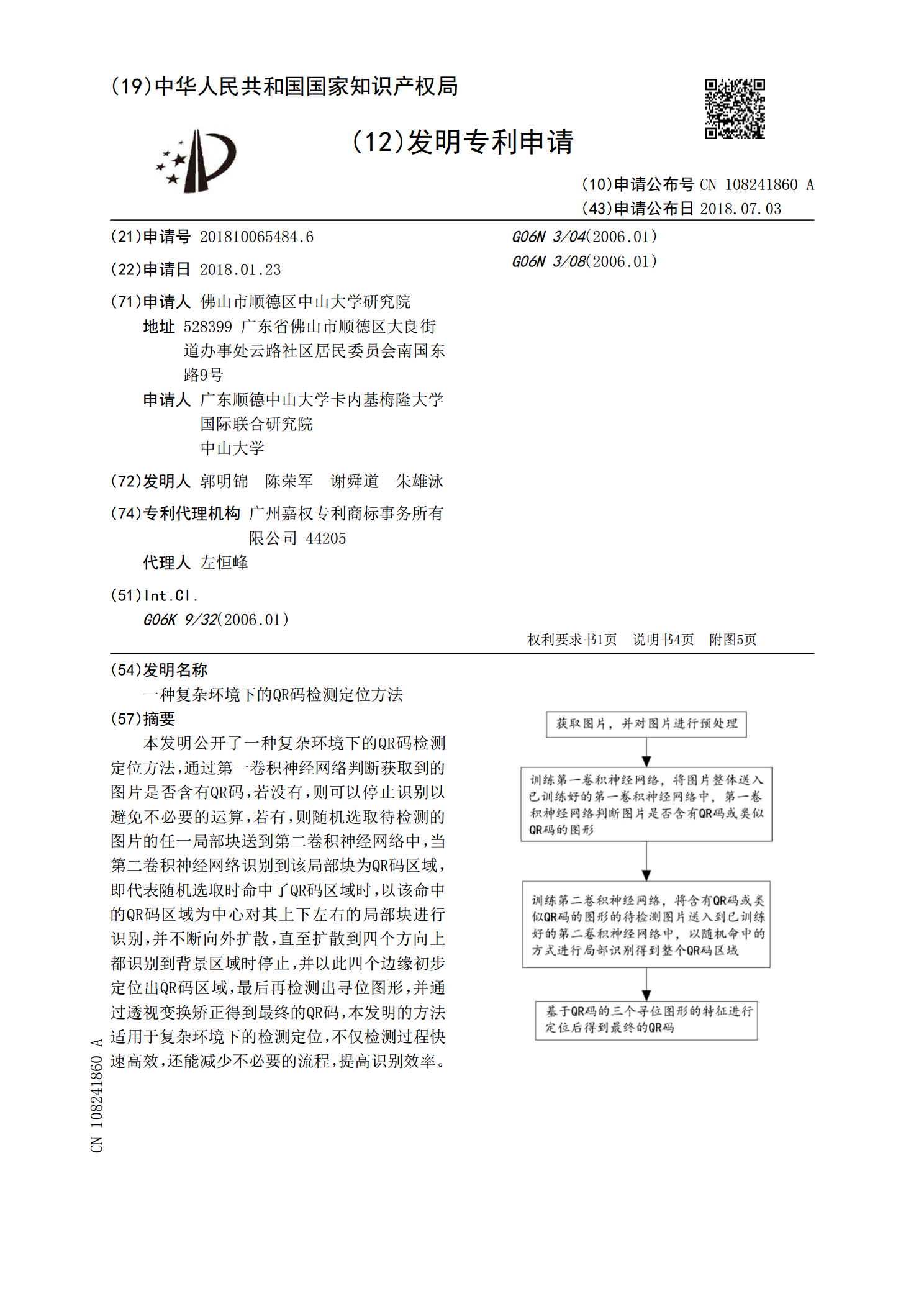
本发明公开了一种复杂环境下的QR码检测定位方法,通过第一卷积神经网络判断获取到的图片是否含有QR码,若没有,则可以停止识别以避免不必要的运算,若有,则随机选取待检测的图片的任一局部块送到第二卷积神经网络中,当第二卷积神经网络识别到该局部块为QR码区域,即代表随机选取时命中了QR码区域时,以该命中的QR码区域为中心对其上下左右的局部块进行识别,并不断向外扩散,直至扩散到四个方向上都识别到背景区域时停止,并以此四个边缘初步定位出QR码区域,最后再检测出寻位图形,并通过透视变换矫正得到最终的QR码,本发明的方法