
一种虹膜定位方法及虹膜识别系统.pdf

斌斌****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种虹膜定位方法及虹膜识别系统.pdf
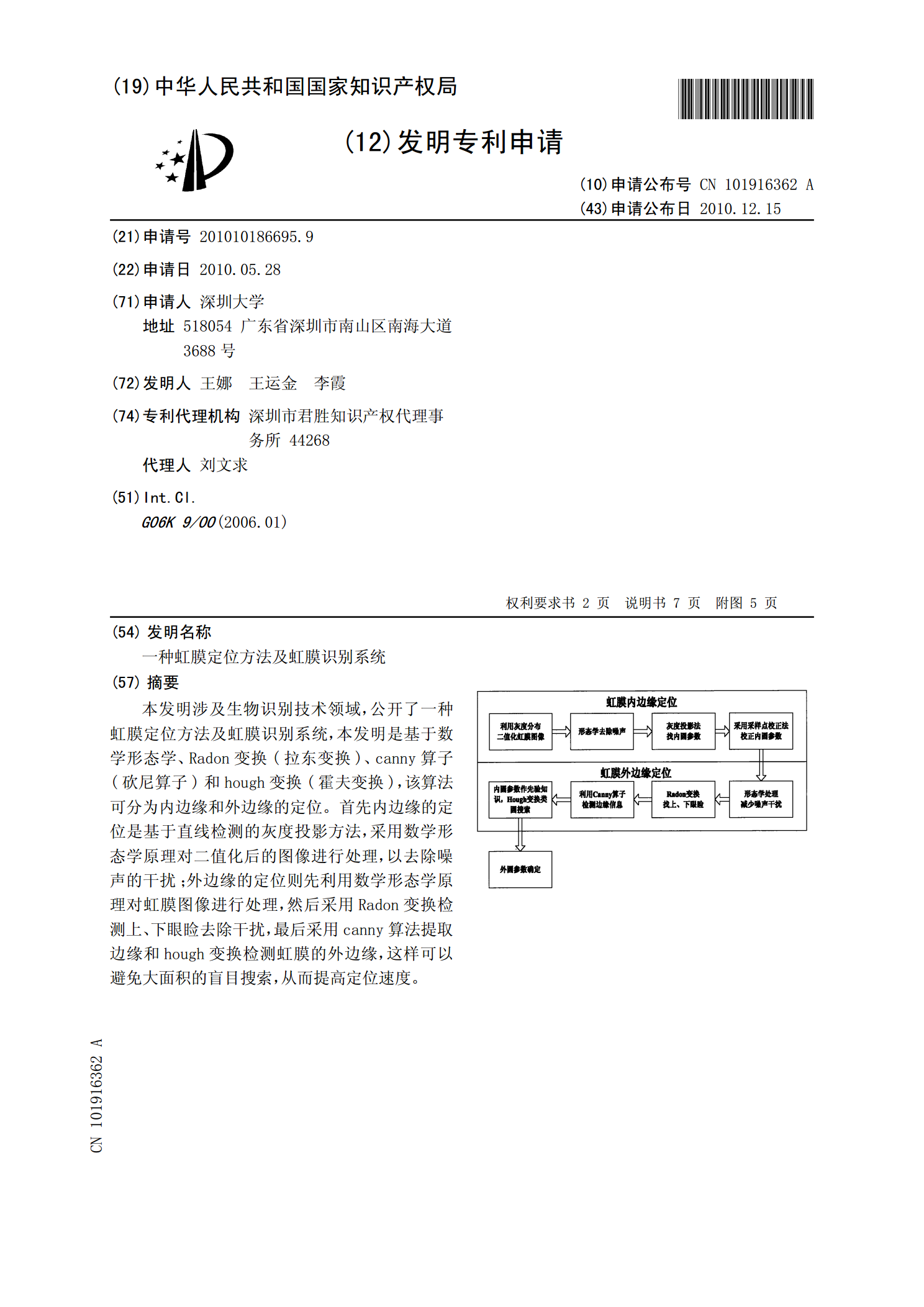
本发明涉及生物识别技术领域,公开了一种虹膜定位方法及虹膜识别系统,本发明是基于数学形态学、Radon变换(拉东变换)、canny算子(砍尼算子)和hough变换(霍夫变换),该算法可分为内边缘和外边缘的定位。首先内边缘的定位是基于直线检测的灰度投影方法,采用数学形态学原理对二值化后的图像进行处理,以去除噪声的干扰;外边缘的定位则先利用数学形态学原理对虹膜图像进行处理,然后采用Radon变换检测上、下眼睑去除干扰,最后采用canny算法提取边缘和hough变换检测虹膜的外边缘,这样可以避免大面积的盲目搜索,

虹膜识别系统定位算法研究.docx
虹膜识别系统定位算法研究虹膜识别技术是一种生物特征识别技术,被广泛应用于个人身份认证、智能门禁等领域。而虹膜定位是虹膜识别过程中的关键步骤之一,其准确率和效率直接影响整个识别系统的性能。因此,研究虹膜识别系统定位算法具有重要意义。首先,我们来了解虹膜定位的基本原理和过程。虹膜是位于眼球的虹膜结构,具有个体差异性强、稳定性好的特点。虹膜定位的目的就是从眼部图像中准确定位出虹膜区域,并去除干扰因素,为后续的虹膜特征提取和识别打下基础。虹膜定位主要包括以下几个步骤:1.眼睛图像预处理:将眼睛图像进行去噪、增强等

一种改进的虹膜定位方法.docx
一种改进的虹膜定位方法虹膜定位技术是一种基于生物特征识别的身份验证技术,其精度高、安全性能好,已经被广泛用于各种领域,例如银行ATM机、安全门、电子支付等等。然而,现有的虹膜定位技术存在一些问题,如精度较低、速度较慢、容易受到环境干扰等,这些问题将对其应用进行一定限制。因此,本文提出了一种改进的虹膜定位方法。1.现有虹膜定位技术存在的问题虹膜是人眼中的一部分,是瞳孔周围的有色环形组织。虹膜定位技术是通过识别眼睛中的虹膜来进行身份验证。然而,目前的虹膜定位技术存在一些问题:(1)图像质量低下。虹膜定位技术需
虹膜快速定位装置及其定位方法.pdf
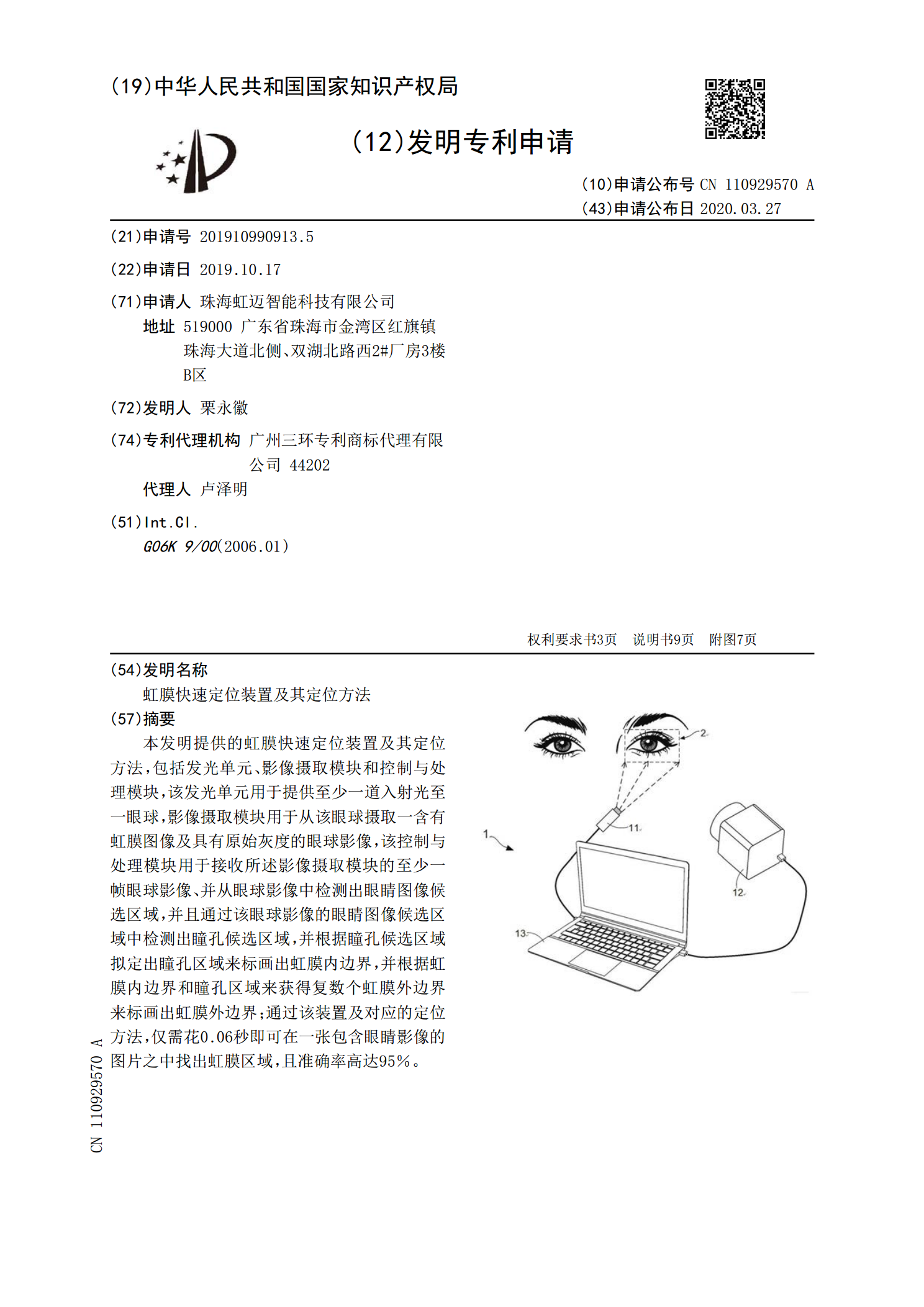
本发明提供的虹膜快速定位装置及其定位方法,包括发光单元、影像摄取模块和控制与处理模块,该发光单元用于提供至少一道入射光至一眼球,影像摄取模块用于从该眼球摄取一含有虹膜图像及具有原始灰度的眼球影像,该控制与处理模块用于接收所述影像摄取模块的至少一帧眼球影像、并从眼球影像中检测出眼睛图像候选区域,并且通过该眼球影像的眼睛图像候选区域中检测出瞳孔候选区域,并根据瞳孔候选区域拟定出瞳孔区域来标画出虹膜内边界,并根据虹膜内边界和瞳孔区域来获得复数个虹膜外边界来标画出虹膜外边界;通过该装置及对应的定位方法,仅需花0.

虹膜识别系统定位算法研究的任务书.docx
虹膜识别系统定位算法研究的任务书任务书研究主题:虹膜识别系统定位算法研究一、研究背景及意义虹膜识别技术作为生物特征识别的一种重要方法,具有高安全性、不可伪造性和高精确性等优点,在安全性要求较高的领域得到了广泛应用。而虹膜识别系统中的定位算法是实现识别的关键环节之一,其准确性和稳定性直接影响整个系统的性能。目前虹膜识别系统中的定位算法主要包括定位边缘检测算法、虹膜区域提取算法和冗余虹膜区域去除算法。然而,现有的算法在解决噪声和光照变化等问题上仍然存在一定的挑战,精确度和鲁棒性有待进一步提升。因此,本研究旨在