
一种复杂环境下的多源组合导航定位方法.pdf

猫巷****忠娟


1/10

2/10

3/10
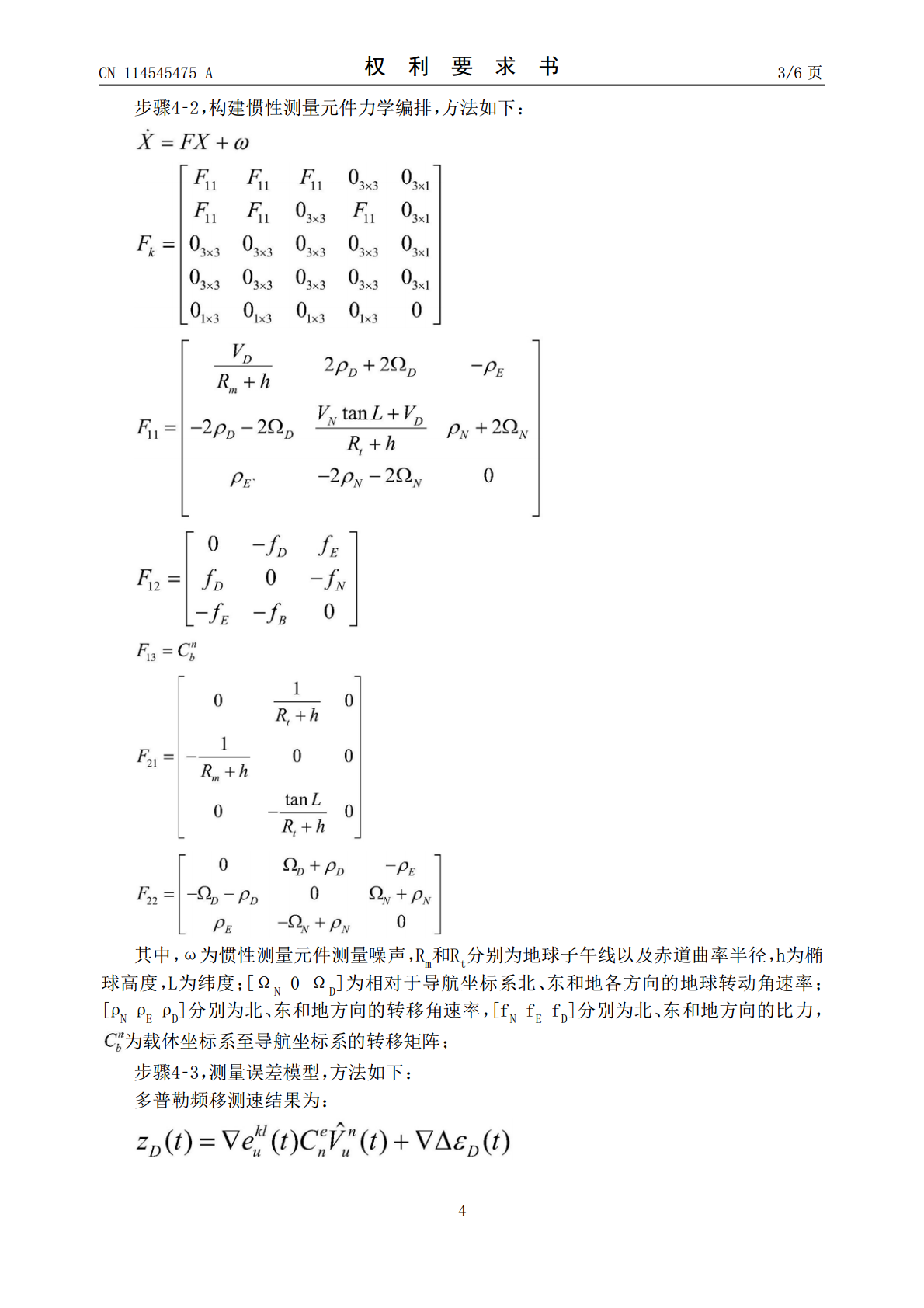
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种复杂环境下的多源组合导航定位方法.pdf
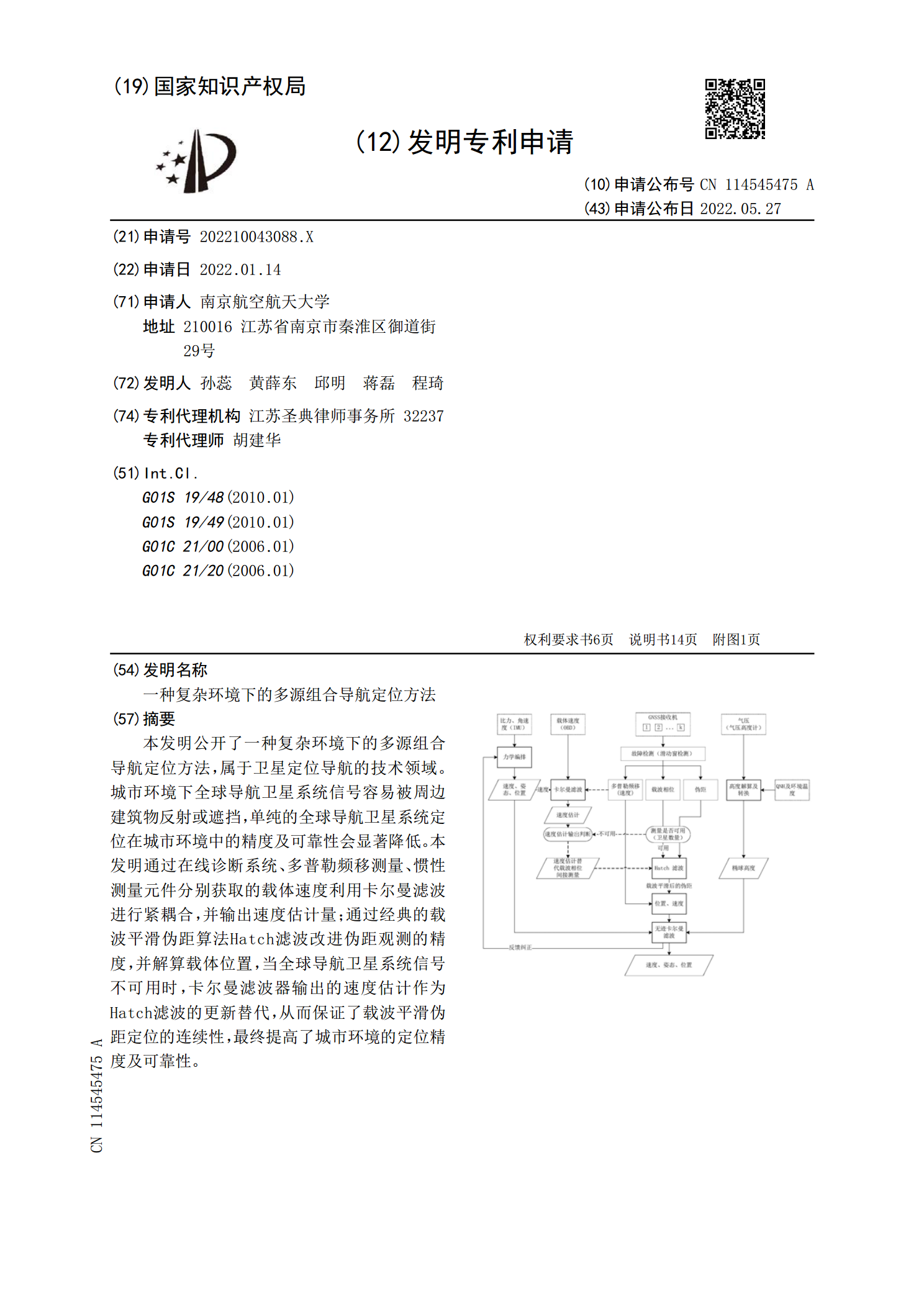
本发明公开了一种复杂环境下的多源组合导航定位方法,属于卫星定位导航的技术领域。城市环境下全球导航卫星系统信号容易被周边建筑物反射或遮挡,单纯的全球导航卫星系统定位在城市环境中的精度及可靠性会显著降低。本发明通过在线诊断系统、多普勒频移测量、惯性测量元件分别获取的载体速度利用卡尔曼滤波进行紧耦合,并输出速度估计量;通过经典的载波平滑伪距算法Hatch滤波改进伪距观测的精度,并解算载体位置,当全球导航卫星系统信号不可用时,卡尔曼滤波器输出的速度估计作为Hatch滤波的更新替代,从而保证了载波平滑伪距定位的连续

复杂环境下多源异构自适应组合导航技术研究.docx
复杂环境下多源异构自适应组合导航技术研究复杂环境下多源异构自适应组合导航技术研究摘要:随着技术的日益发展,导航系统已成为现代人类生活中不可或缺的一部分。然而,在复杂环境下,传统的导航系统往往面临着诸多挑战,如信号受阻、定位误差增大等问题。为了解决这些问题,本文研究了多源异构自适应组合导航技术,并提出了一种基于多源异构数据的导航系统,实现了在复杂环境下准确、稳定的定位与导航。关键词:多源异构数据;自适应组合;导航技术1.引言随着全球定位系统(GPS)的普及和发展,人类在导航领域取得了许多重要的突破。然而,传

复杂环境下BDSGPS紧组合高精度定位方法.pptx
汇报人:/目录0102定位原理简介组合定位的优势定位精度的提高方法03多径效应建筑物遮挡信号干扰高动态场景04算法总体架构数据预处理联合解算算法滤波与融合算法优化05实验场景与设备定位精度评估指标实验结果与分析与其他方法的比较06在智能交通领域的应用在无人驾驶领域的应用技术发展与挑战未来研究方向汇报人:

复杂环境下BDSGPS紧组合高精度定位方法.docx
复杂环境下BDSGPS紧组合高精度定位方法BDSGPS紧组合高精度定位方法摘要:随着卫星导航系统的不断发展,越来越多的应用需要更高精度的定位信息。然而,在城市峡谷、高楼大厦等复杂环境下,卫星信号的遮挡和多路径效应会对定位的精度和可靠性产生影响。为了解决这一问题,本文提出了BDSGPS紧组合高精度定位方法,该方法利用BDS和GPS的双星技术,通过组合两种卫星系统的导航信息,实现更精确的定位结果。1.引言在城市峡谷、高楼大厦等复杂环境下,单一卫星系统的定位精度受到限制。因此,利用多个卫星系统的定位信息,可以有

城市复杂环境下气压测高与卫星导航组合定位方法实验研究.docx
城市复杂环境下气压测高与卫星导航组合定位方法实验研究城市复杂环境下气压测高与卫星导航组合定位方法实验研究摘要:随着城市的快速发展和人们对导航定位精度要求的增加,如何在城市复杂环境下实现高精度的导航定位成为一个研究热点。本文针对城市复杂环境下的导航定位问题,提出了一种基于气压测高和卫星导航的组合定位方法,并进行了实验研究。通过对比单独使用气压测高和卫星导航的定位精度,验证了组合定位方法的有效性。实验结果表明,该组合定位方法在城市复杂环境下可以提高定位精度,并且具有较好的鲁棒性。关键词:城市复杂环境;气压测高