
一种挖掘机复杂环境下SLAM建图定位方法、系统及装置.pdf

雨巷****怡轩


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种挖掘机复杂环境下SLAM建图定位方法、系统及装置.pdf
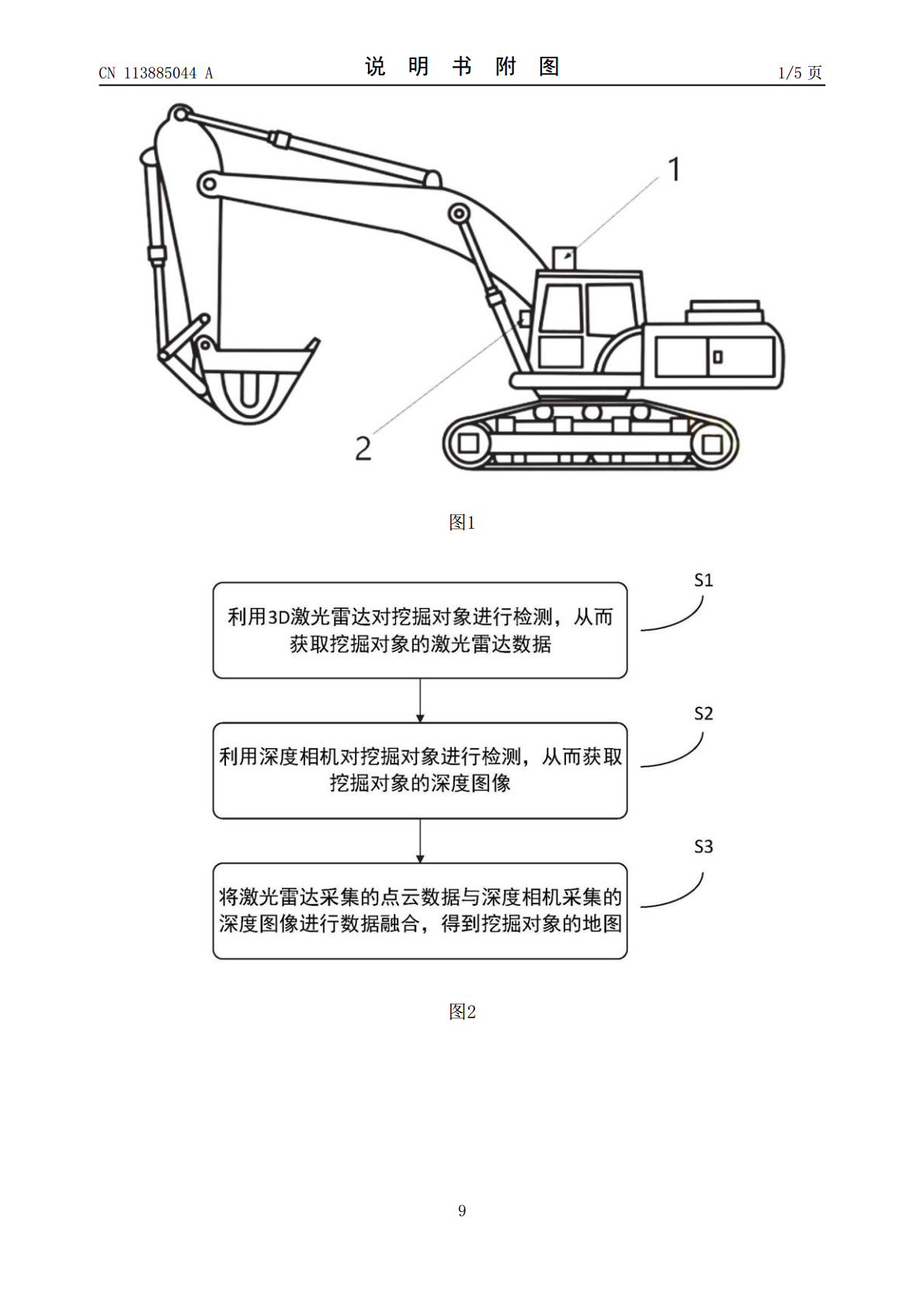
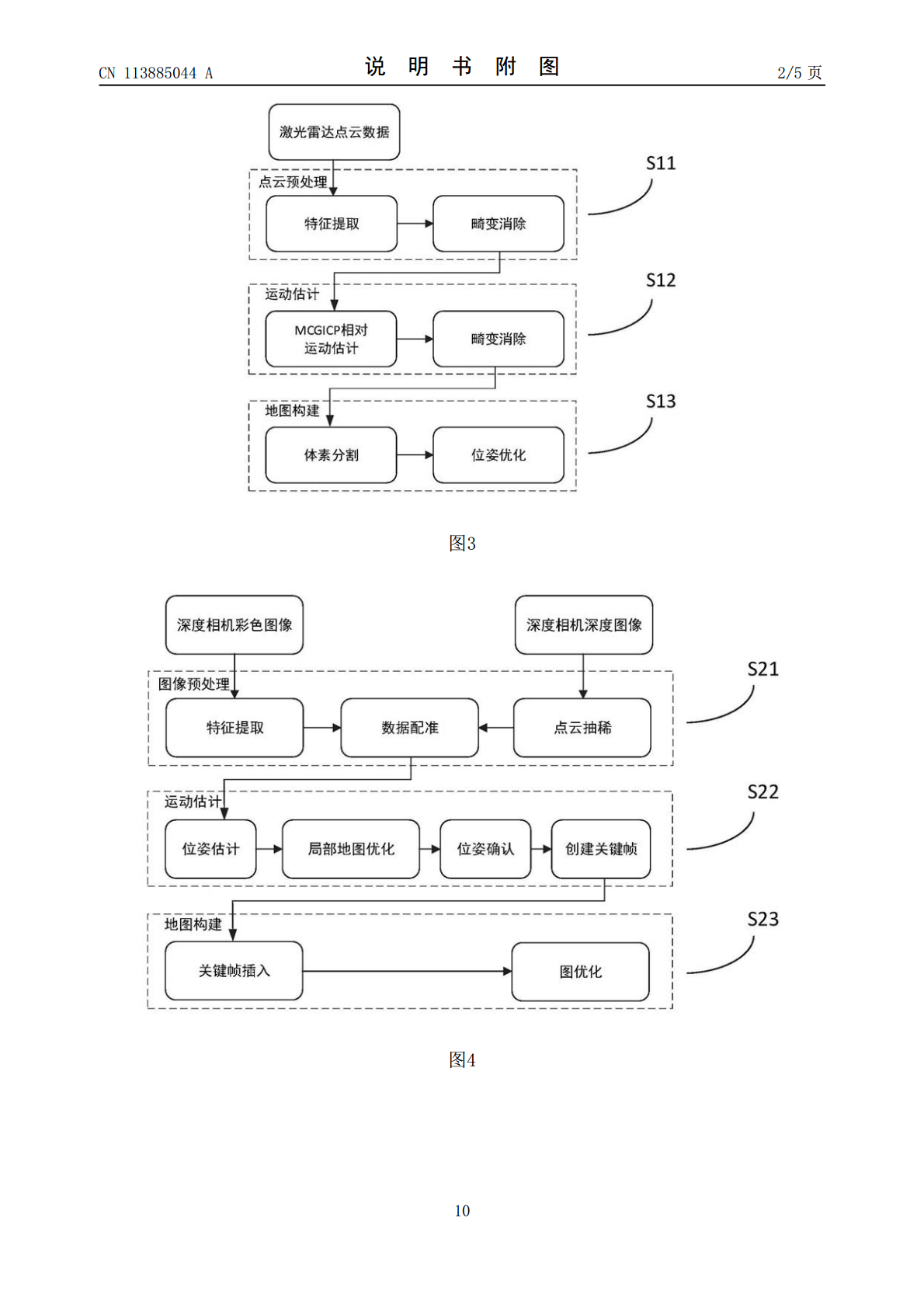
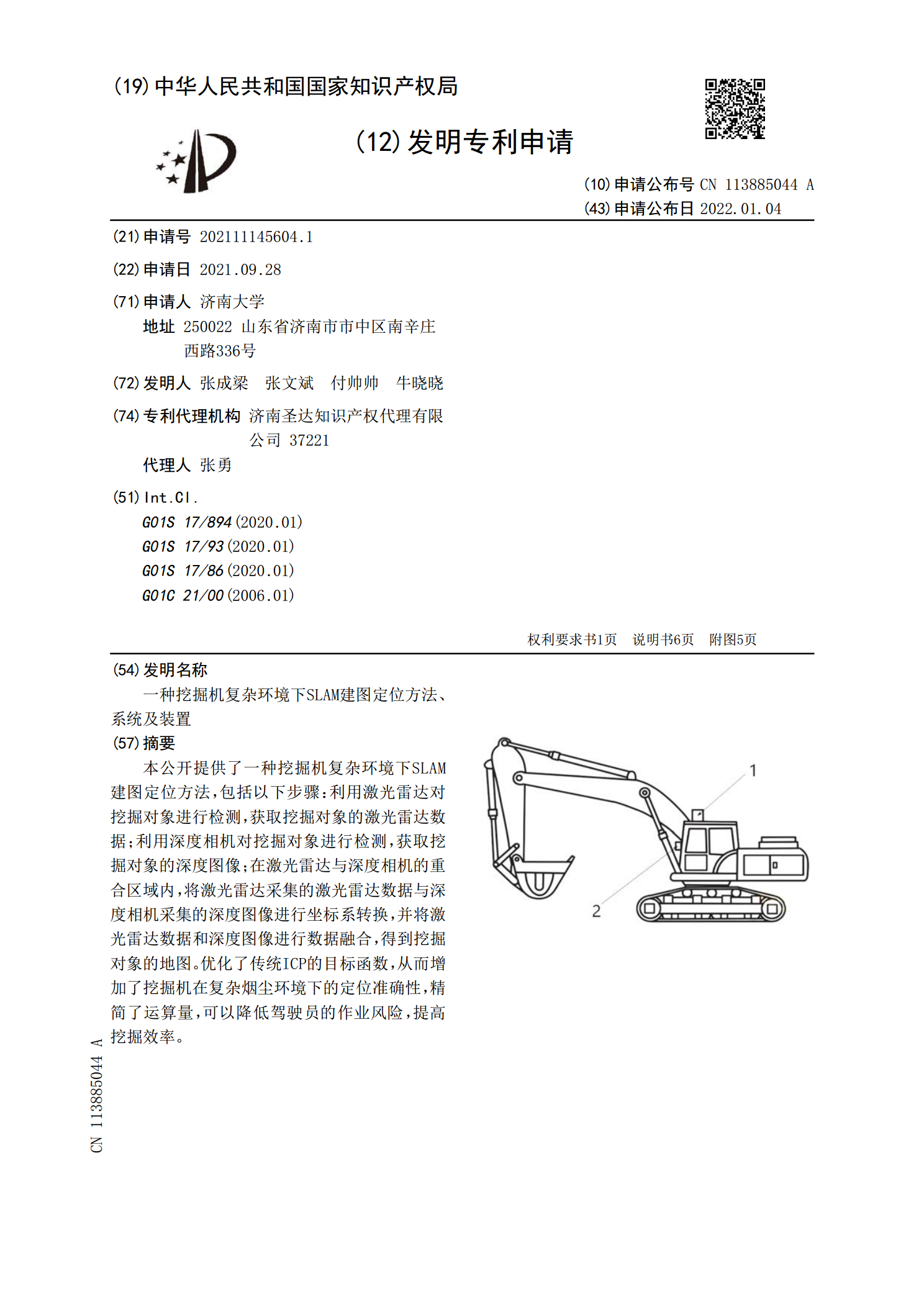
本公开提供了一种挖掘机复杂环境下SLAM建图定位方法,包括以下步骤:利用激光雷达对挖掘对象进行检测,获取挖掘对象的激光雷达数据;利用深度相机对挖掘对象进行检测,获取挖掘对象的深度图像;在激光雷达与深度相机的重合区域内,将激光雷达采集的激光雷达数据与深度相机采集的深度图像进行坐标系转换,并将激光雷达数据和深度图像进行数据融合,得到挖掘对象的地图。优化了传统ICP的目标函数,从而增加了挖掘机在复杂烟尘环境下的定位准确性,精简了运算量,可以降低驾驶员的作业风险,提高挖掘效率。

一种复杂环境下虹膜跟踪定位方法及系统.pdf
本发明公开了一种复杂环境下虹膜跟踪定位方法及系统,包括获取视频图像并对视频图像进行预处理得到灰度图像;针对视频图像提取并验证人脸区域;根据通过验证的人脸区域确定人眼区域;根据人眼区域定位瞳孔;定位虹膜,本发明通过AdaBoost算法和面积阈值法针对视频图像提取并验证人脸区域,又通过在经过验证的人脸区域中确定人眼区域,进一步缩小虹膜定位的范围,再通过在人眼区域初步定位瞳孔从而更精确地定位虹膜,不仅保留了原图像的重要特征信息而且加快了运算速度。本发明适用于图像检测领域。
一种全景视觉SLAM建图方法.pdf
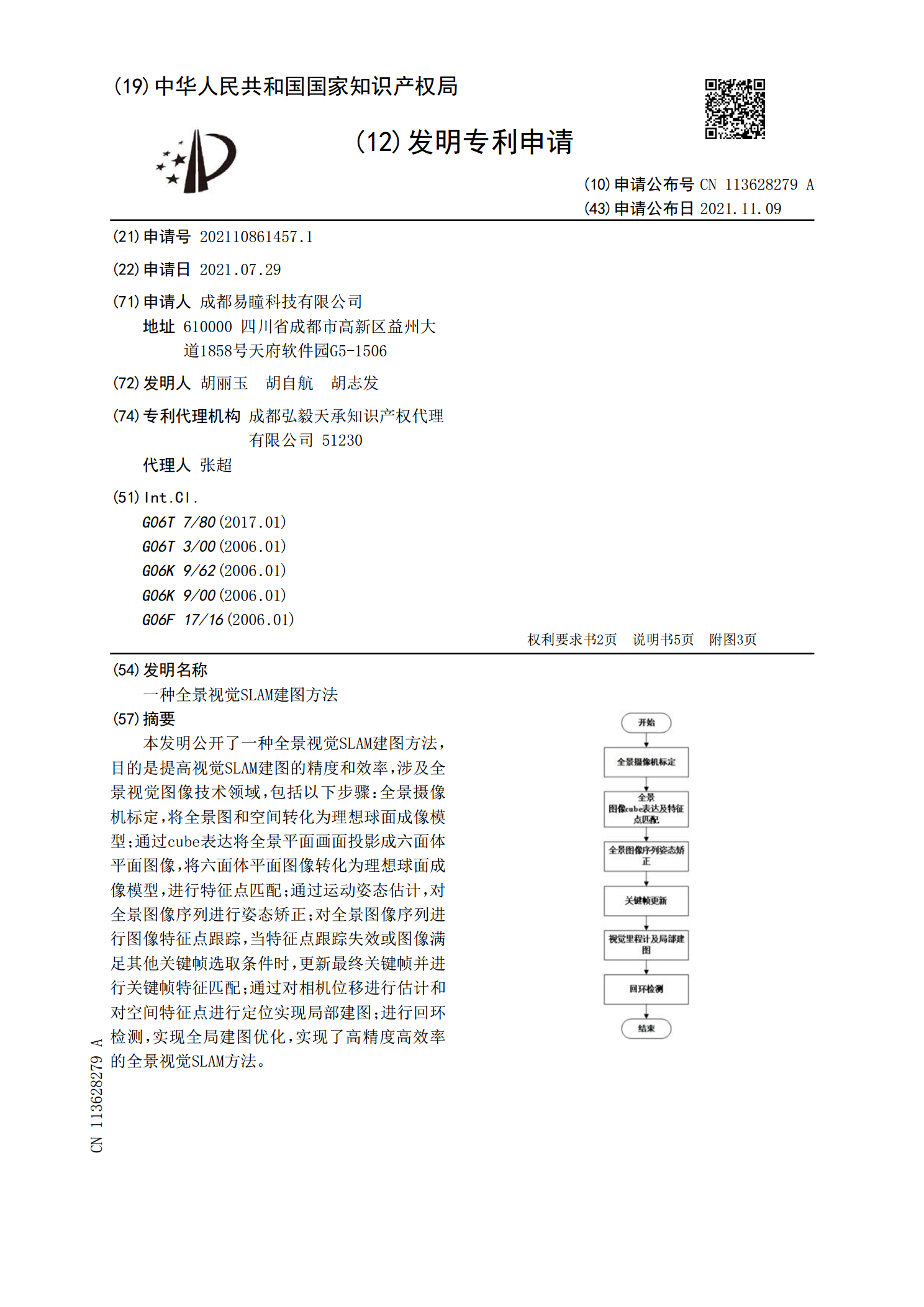
本发明公开了一种全景视觉SLAM建图方法,目的是提高视觉SLAM建图的精度和效率,涉及全景视觉图像技术领域,包括以下步骤:全景摄像机标定,将全景图和空间转化为理想球面成像模型;通过cube表达将全景平面画面投影成六面体平面图像,将六面体平面图像转化为理想球面成像模型,进行特征点匹配;通过运动姿态估计,对全景图像序列进行姿态矫正;对全景图像序列进行图像特征点跟踪,当特征点跟踪失效或图像满足其他关键帧选取条件时,更新最终关键帧并进行关键帧特征匹配;通过对相机位移进行估计和对空间特征点进行定位实现局部建图;进行
一种轻量级SLAM分段建图方法.pdf
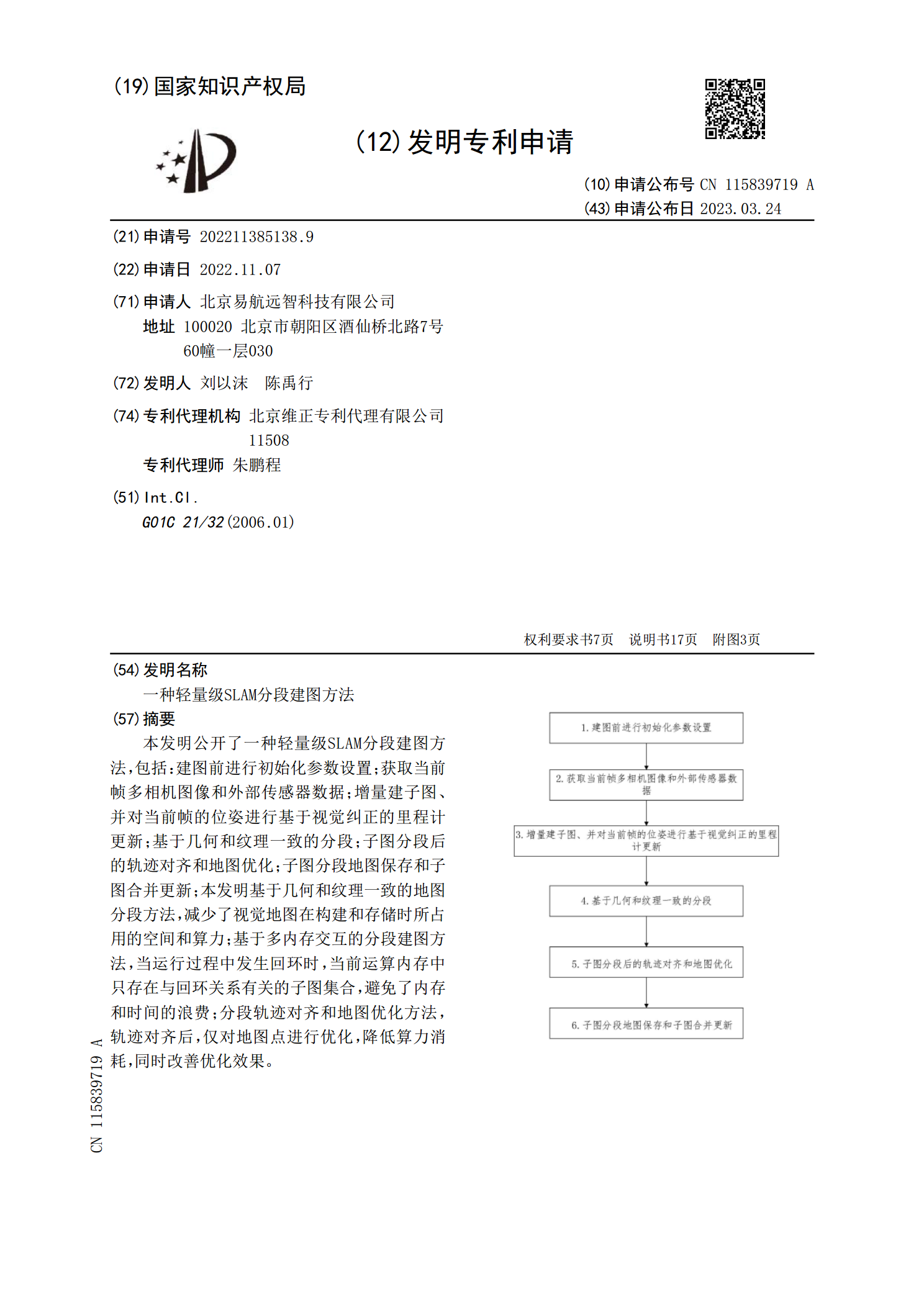
本发明公开了一种轻量级SLAM分段建图方法,包括:建图前进行初始化参数设置;获取当前帧多相机图像和外部传感器数据;增量建子图、并对当前帧的位姿进行基于视觉纠正的里程计更新;基于几何和纹理一致的分段;子图分段后的轨迹对齐和地图优化;子图分段地图保存和子图合并更新;本发明基于几何和纹理一致的地图分段方法,减少了视觉地图在构建和存储时所占用的空间和算力;基于多内存交互的分段建图方法,当运行过程中发生回环时,当前运算内存中只存在与回环关系有关的子图集合,避免了内存和时间的浪费;分段轨迹对齐和地图优化方法,轨迹对齐
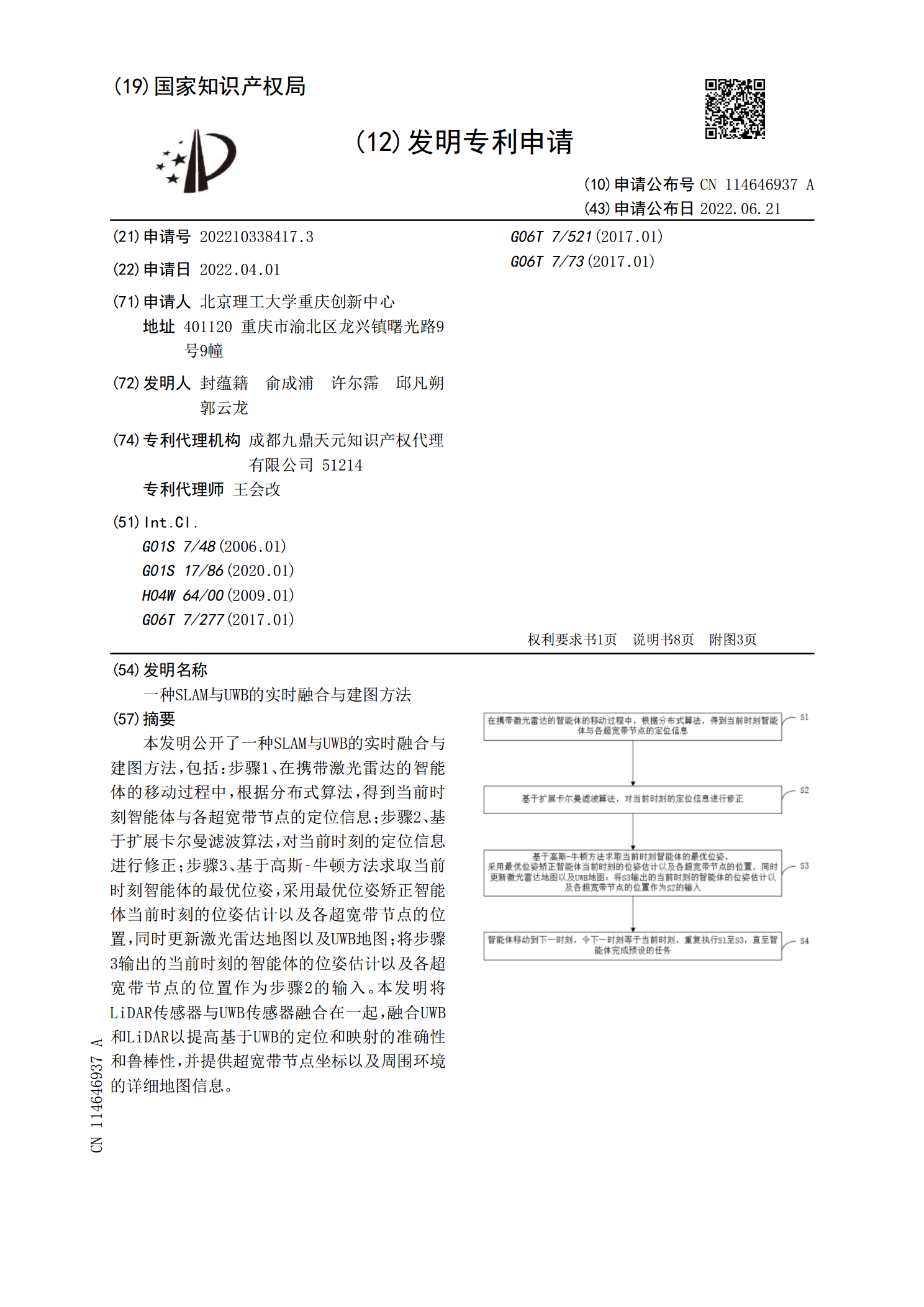
一种SLAM与UWB的实时融合与建图方法.pdf
本发明公开了一种SLAM与UWB的实时融合与建图方法,包括:步骤1、在携带激光雷达的智能体的移动过程中,根据分布式算法,得到当前时刻智能体与各超宽带节点的定位信息;步骤2、基于扩展卡尔曼滤波算法,对当前时刻的定位信息进行修正;步骤3、基于高斯?牛顿方法求取当前时刻智能体的最优位姿,采用最优位姿矫正智能体当前时刻的位姿估计以及各超宽带节点的位置,同时更新激光雷达地图以及UWB地图;将步骤3输出的当前时刻的智能体的位姿估计以及各超宽带节点的位置作为步骤2的输入。本发明将LiDAR传感器与UWB传感器融合在一起