
一种助力装置的工业机器人.pdf

雅云****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种助力装置的工业机器人.pdf
本发明公开了一种助力装置的工业机器人,其结构包括控制臂、电控盒、动力臂、数控线、电焊钳、反射转座,所述的控制臂顶端连接动力臂,所述的动力臂末端设有电控盒且通过数控线连接电控盒,所述的电焊钳设于控制臂一端,本发明具有的效果:通过清洁辊滚动覆盖刮板的清洁区域并吸附残留的水渍,以防止污渍对触摸屏和反射条造成二次污染,从而解决现有工业机器人因发射条表面的尘土与水渍造成电子信号反馈失灵导致指向信号稳定性差的问题。
一种具有新型助力装置的工业机器人.pdf
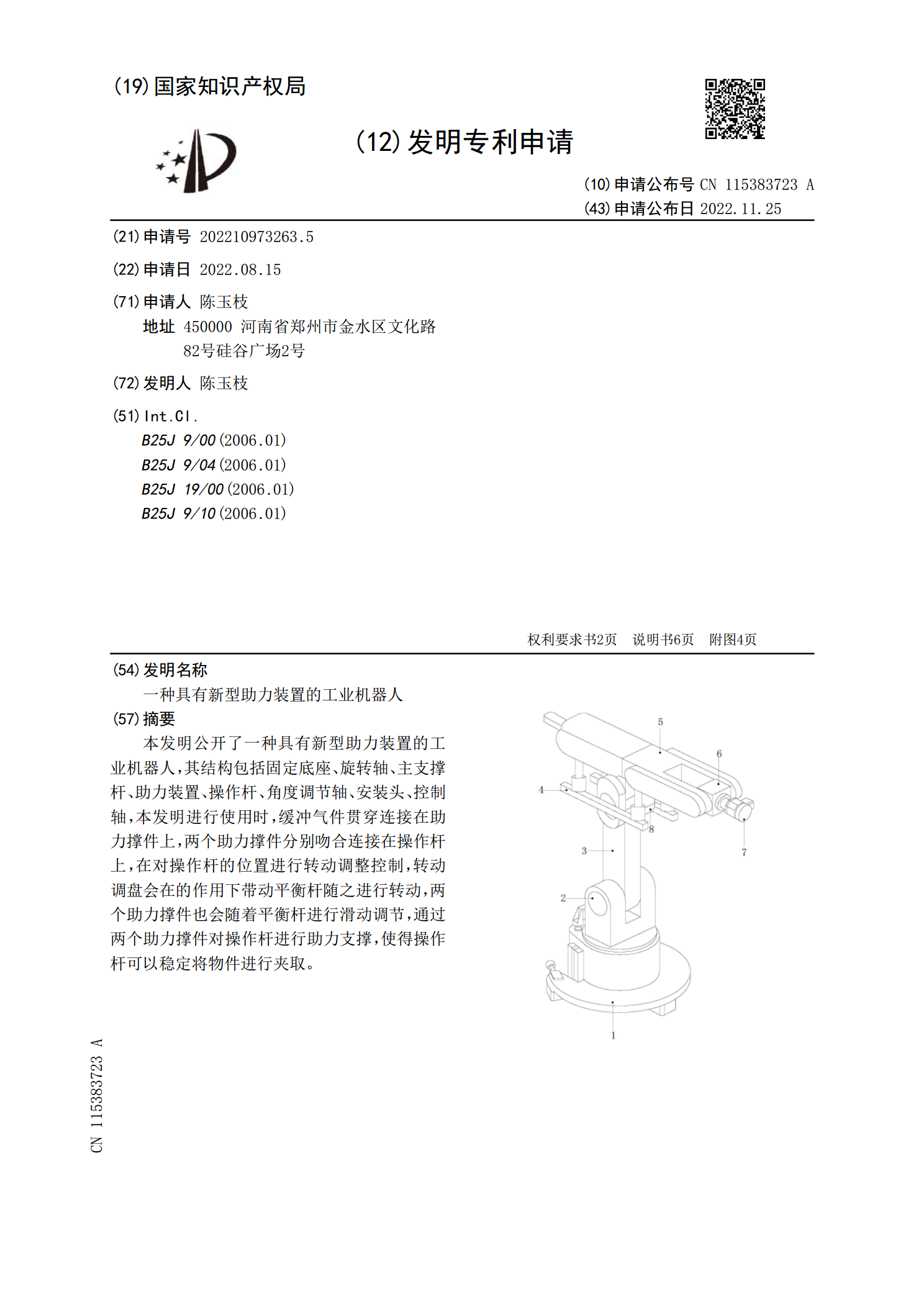
本发明公开了一种具有新型助力装置的工业机器人,其结构包括固定底座、旋转轴、主支撑杆、助力装置、操作杆、角度调节轴、安装头、控制轴,本发明进行使用时,缓冲气件贯穿连接在助力撑件上,两个助力撑件分别吻合连接在操作杆上,在对操作杆的位置进行转动调整控制,转动调盘会在的作用下带动平衡杆随之进行转动,两个助力撑件也会随着平衡杆进行滑动调节,通过两个助力撑件对操作杆进行助力支撑,使得操作杆可以稳定将物件进行夹取。
一种具有新型助力装置的工业机器人.pdf
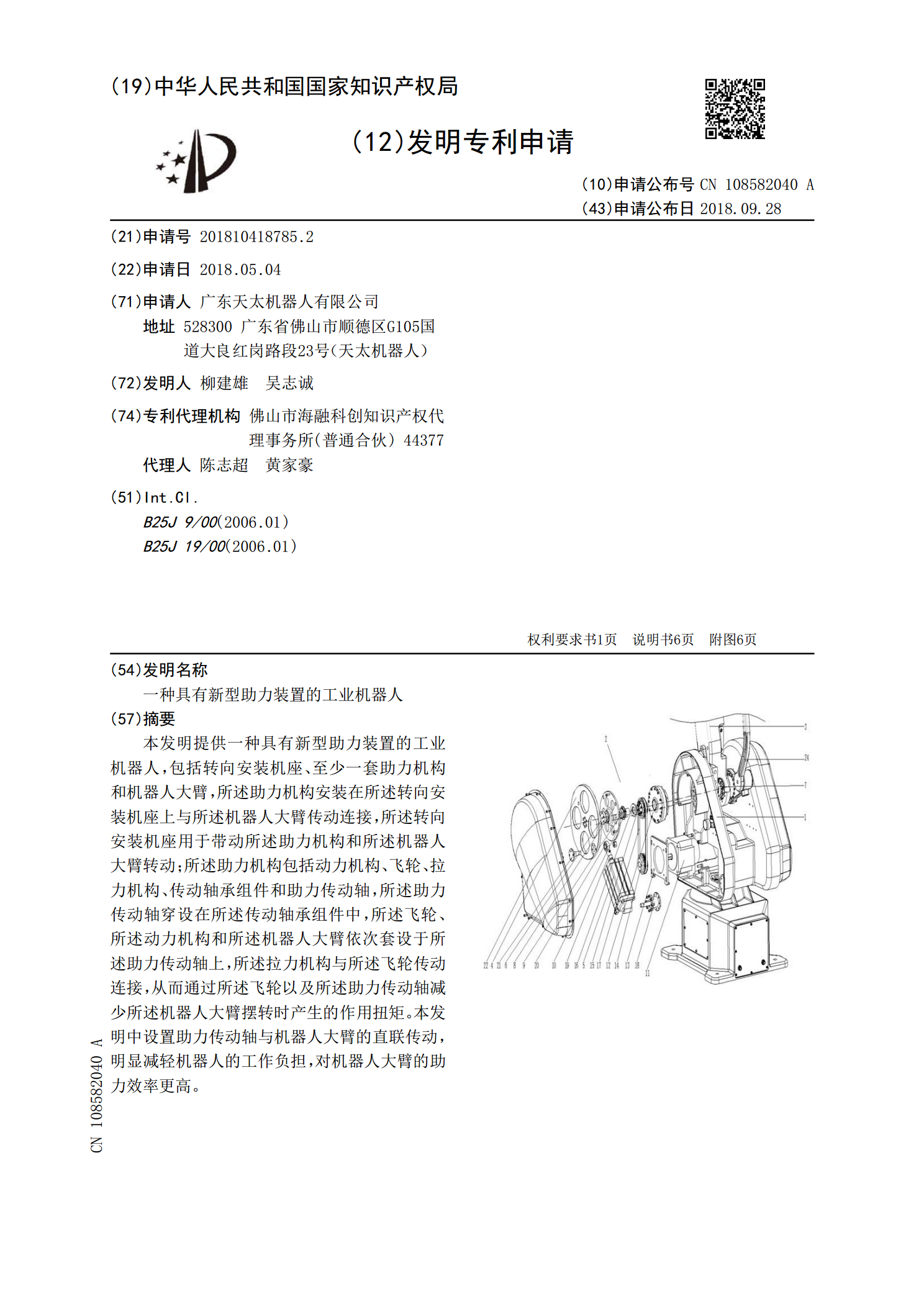
本发明提供一种具有新型助力装置的工业机器人,包括转向安装机座、至少一套助力机构和机器人大臂,所述助力机构安装在所述转向安装机座上与所述机器人大臂传动连接,所述转向安装机座用于带动所述助力机构和所述机器人大臂转动;所述助力机构包括动力机构、飞轮、拉力机构、传动轴承组件和助力传动轴,所述助力传动轴穿设在所述传动轴承组件中,所述飞轮、所述动力机构和所述机器人大臂依次套设于所述助力传动轴上,所述拉力机构与所述飞轮传动连接,从而通过所述飞轮以及所述助力传动轴减少所述机器人大臂摆转时产生的作用扭矩。本发明中设置助力传
助力装置及具有其的工业机器人.pdf
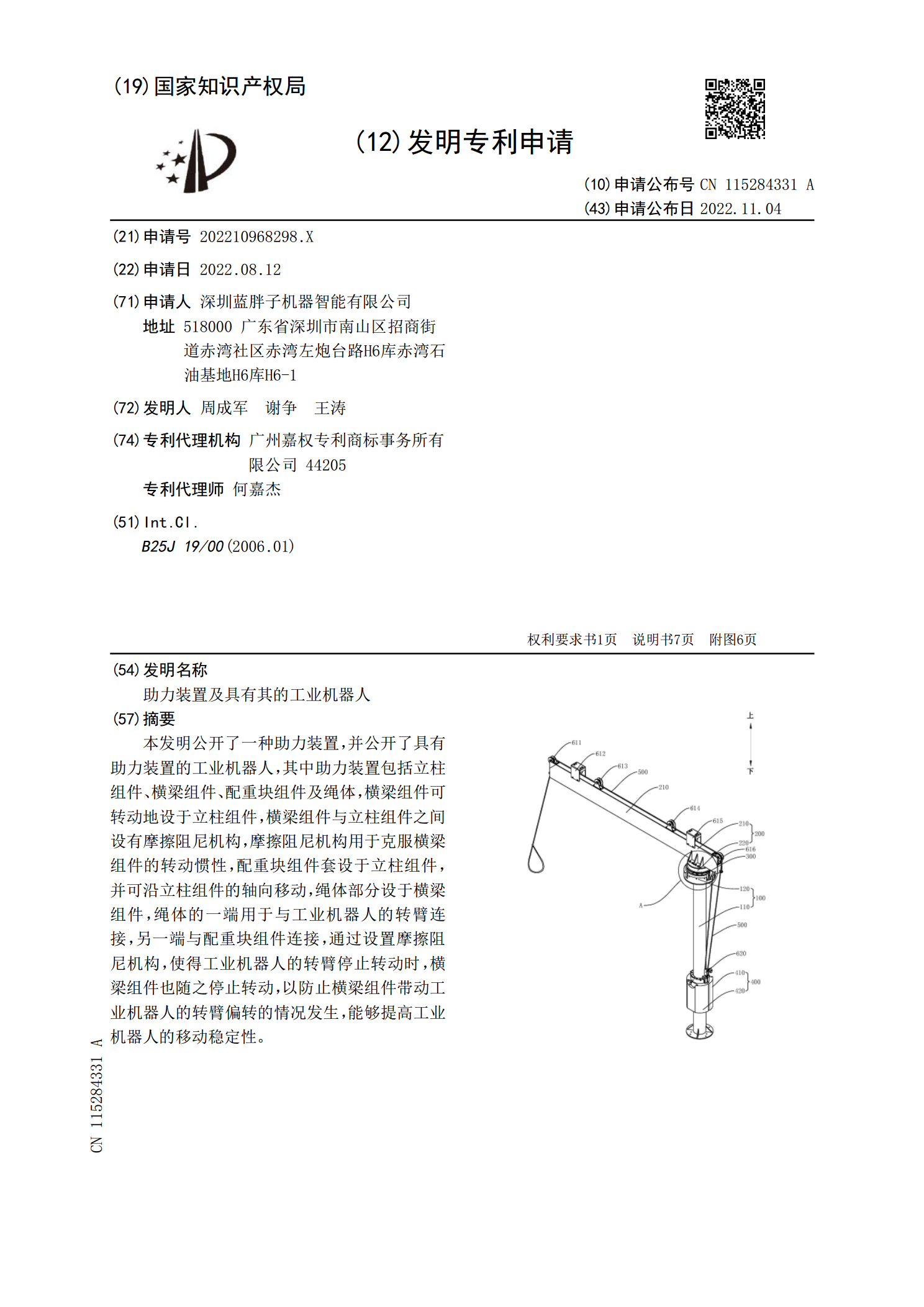
本发明公开了一种助力装置,并公开了具有助力装置的工业机器人,其中助力装置包括立柱组件、横梁组件、配重块组件及绳体,横梁组件可转动地设于立柱组件,横梁组件与立柱组件之间设有摩擦阻尼机构,摩擦阻尼机构用于克服横梁组件的转动惯性,配重块组件套设于立柱组件,并可沿立柱组件的轴向移动,绳体部分设于横梁组件,绳体的一端用于与工业机器人的转臂连接,另一端与配重块组件连接,通过设置摩擦阻尼机构,使得工业机器人的转臂停止转动时,横梁组件也随之停止转动,以防止横梁组件带动工业机器人的转臂偏转的情况发生,能够提高工业机器人的移
一种工业设备移动用助力装置.pdf
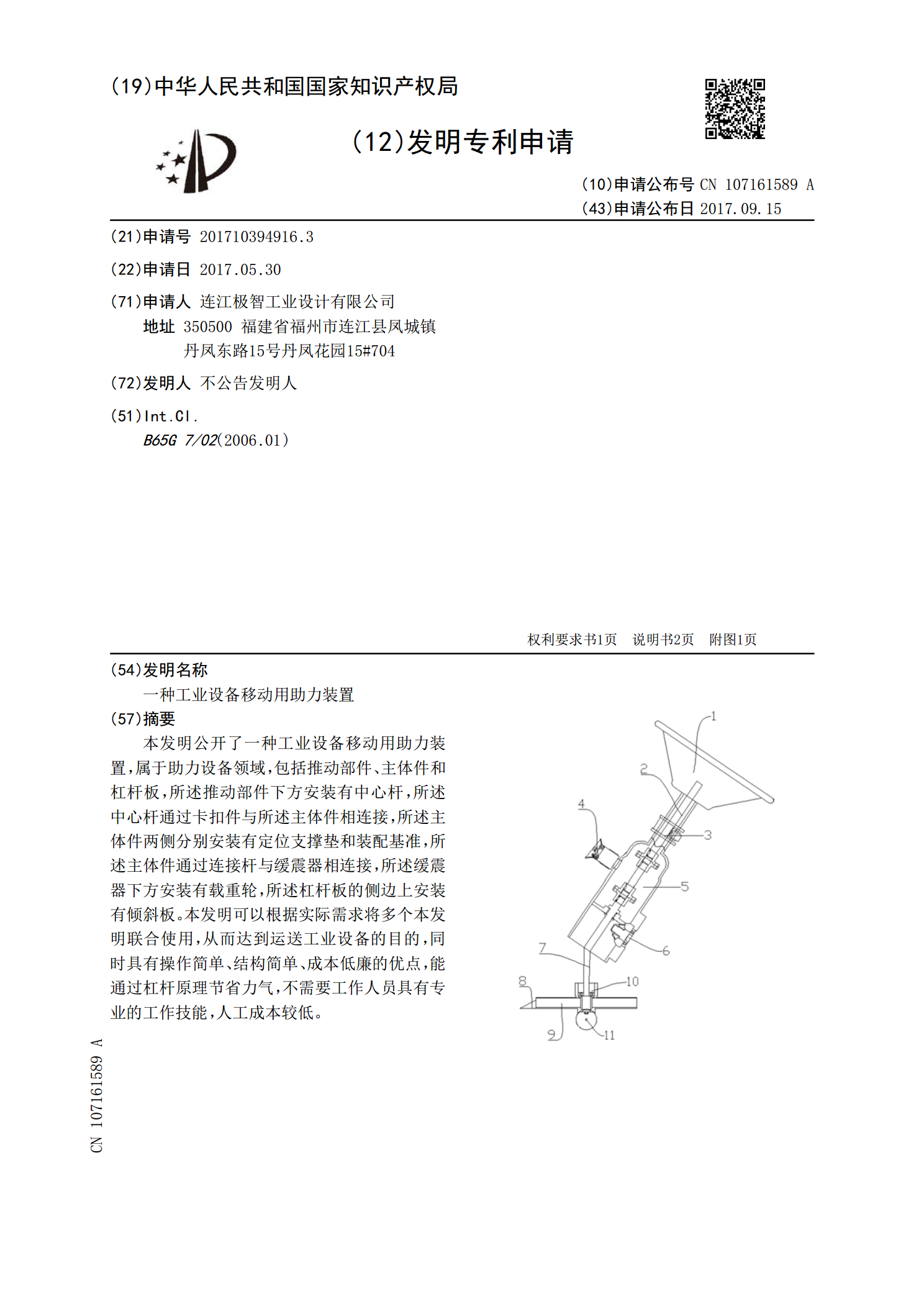
本发明公开了一种工业设备移动用助力装置,属于助力设备领域,包括推动部件、主体件和杠杆板,所述推动部件下方安装有中心杆,所述中心杆通过卡扣件与所述主体件相连接,所述主体件两侧分别安装有定位支撑垫和装配基准,所述主体件通过连接杆与缓震器相连接,所述缓震器下方安装有载重轮,所述杠杆板的侧边上安装有倾斜板。本发明可以根据实际需求将多个本发明联合使用,从而达到运送工业设备的目的,同时具有操作简单、结构简单、成本低廉的优点,能通过杠杆原理节省力气,不需要工作人员具有专业的工作技能,人工成本较低。