
助力装置及具有其的工业机器人.pdf

猫巷****忠娟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
助力装置及具有其的工业机器人.pdf
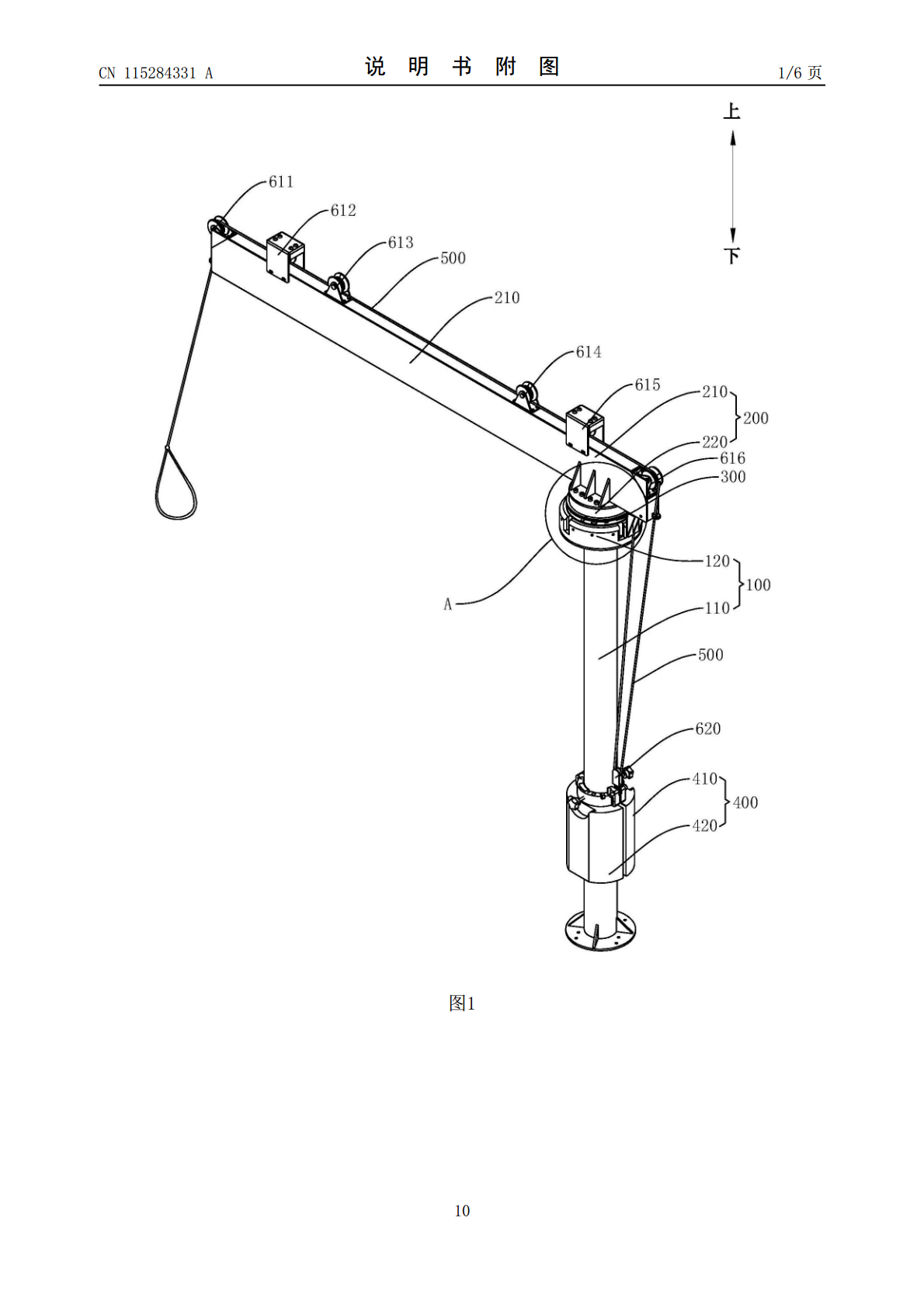
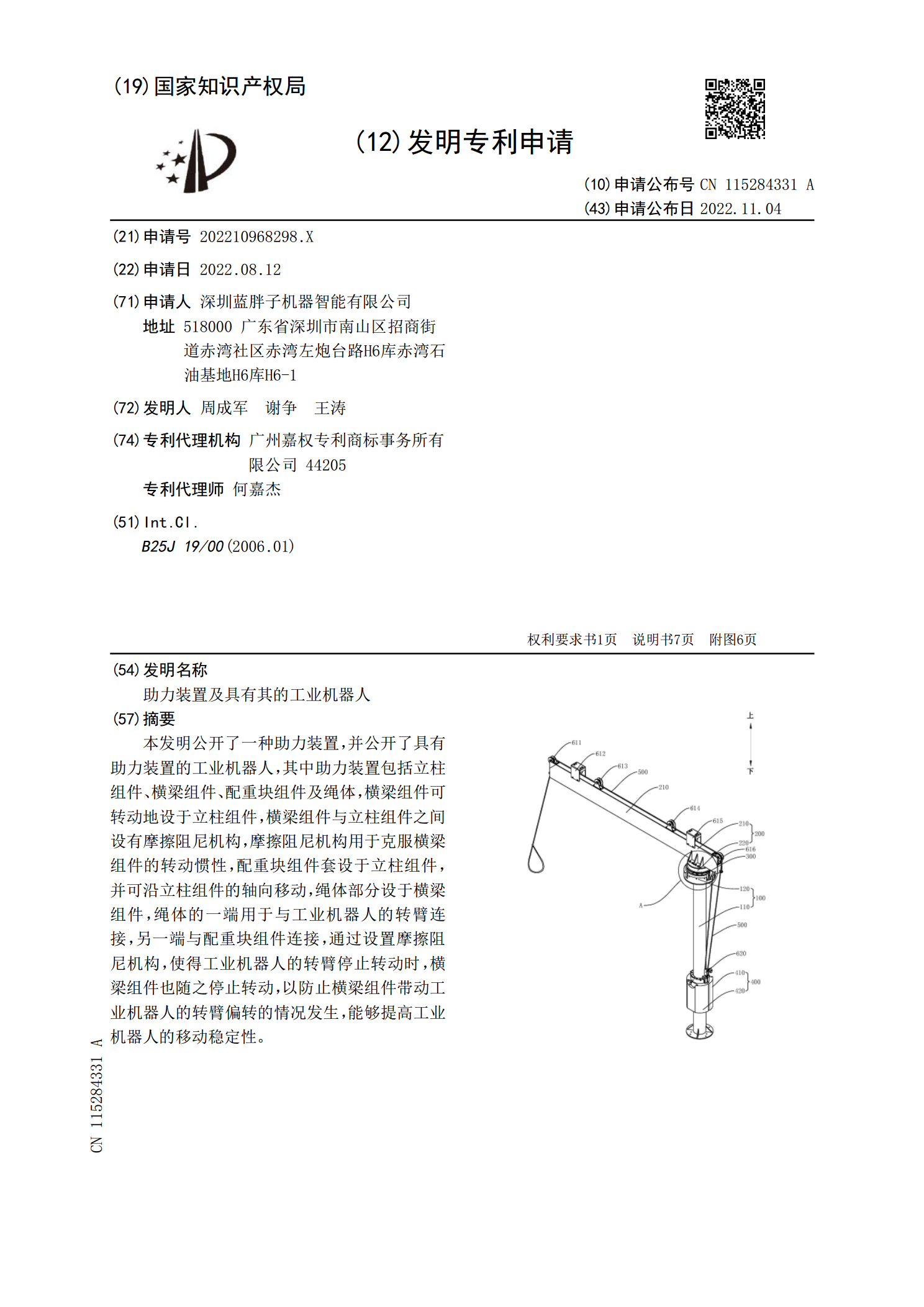
本发明公开了一种助力装置,并公开了具有助力装置的工业机器人,其中助力装置包括立柱组件、横梁组件、配重块组件及绳体,横梁组件可转动地设于立柱组件,横梁组件与立柱组件之间设有摩擦阻尼机构,摩擦阻尼机构用于克服横梁组件的转动惯性,配重块组件套设于立柱组件,并可沿立柱组件的轴向移动,绳体部分设于横梁组件,绳体的一端用于与工业机器人的转臂连接,另一端与配重块组件连接,通过设置摩擦阻尼机构,使得工业机器人的转臂停止转动时,横梁组件也随之停止转动,以防止横梁组件带动工业机器人的转臂偏转的情况发生,能够提高工业机器人的移
一种具有新型助力装置的工业机器人.pdf
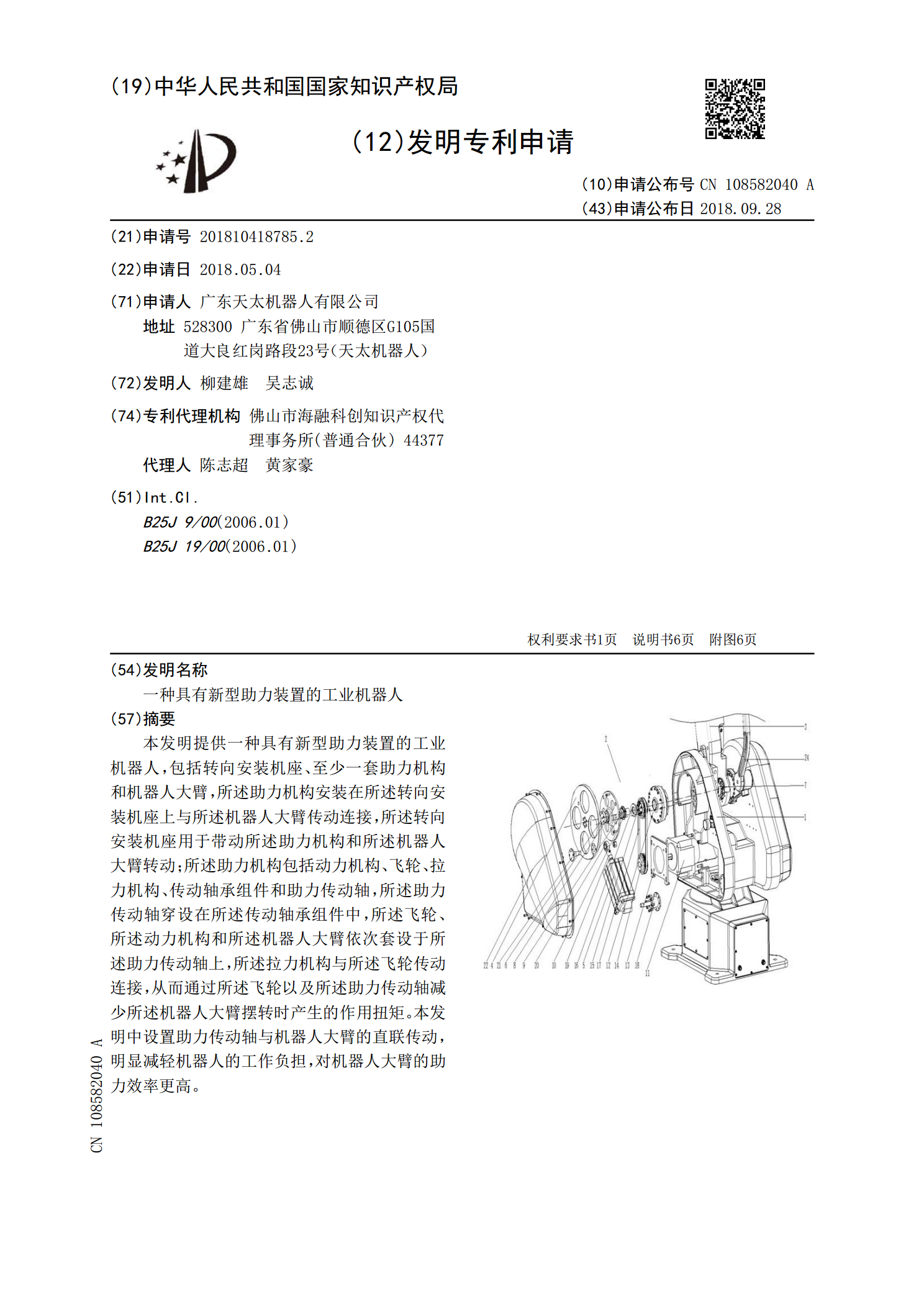
本发明提供一种具有新型助力装置的工业机器人,包括转向安装机座、至少一套助力机构和机器人大臂,所述助力机构安装在所述转向安装机座上与所述机器人大臂传动连接,所述转向安装机座用于带动所述助力机构和所述机器人大臂转动;所述助力机构包括动力机构、飞轮、拉力机构、传动轴承组件和助力传动轴,所述助力传动轴穿设在所述传动轴承组件中,所述飞轮、所述动力机构和所述机器人大臂依次套设于所述助力传动轴上,所述拉力机构与所述飞轮传动连接,从而通过所述飞轮以及所述助力传动轴减少所述机器人大臂摆转时产生的作用扭矩。本发明中设置助力传
一种具有新型助力装置的工业机器人.pdf
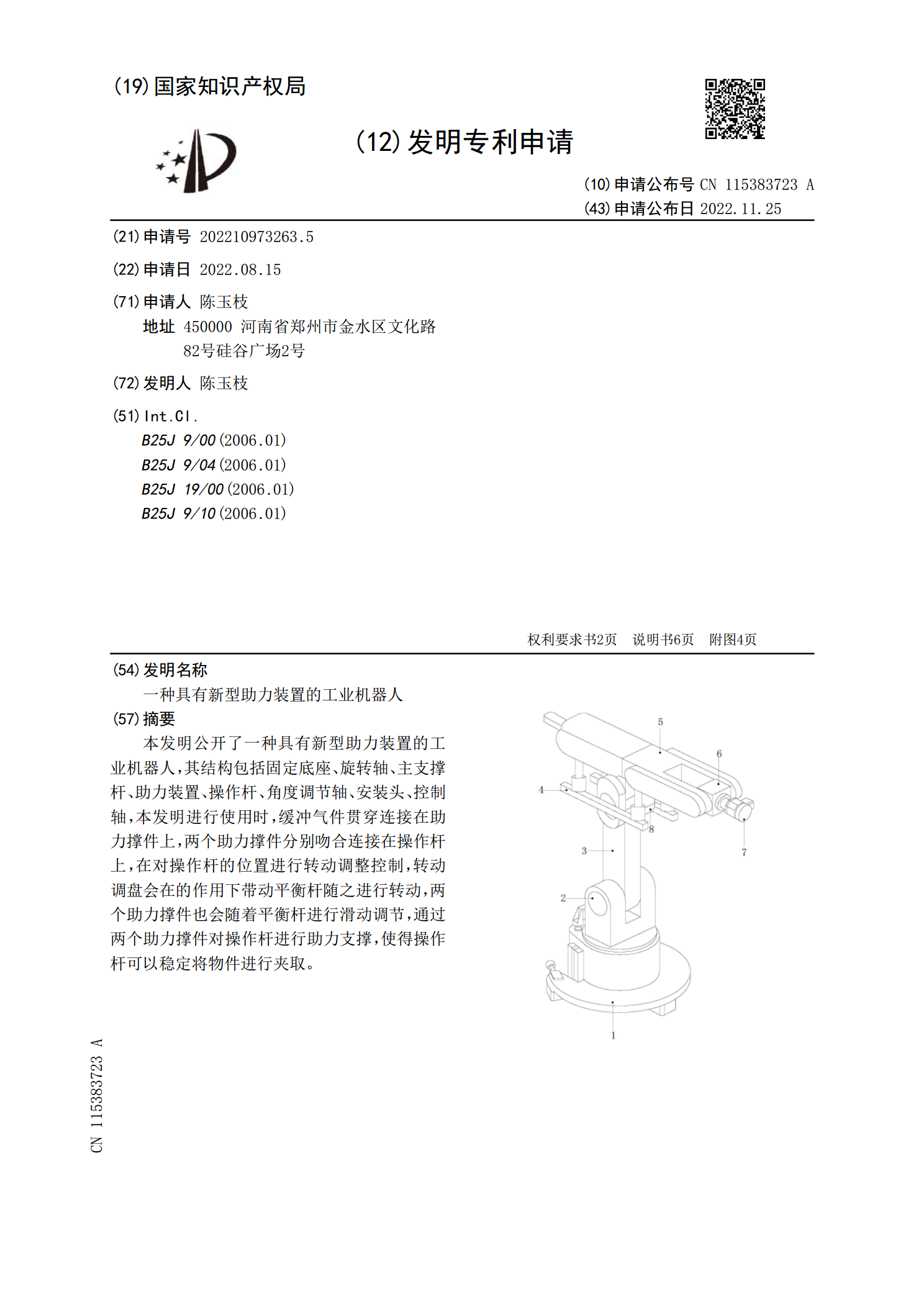
本发明公开了一种具有新型助力装置的工业机器人,其结构包括固定底座、旋转轴、主支撑杆、助力装置、操作杆、角度调节轴、安装头、控制轴,本发明进行使用时,缓冲气件贯穿连接在助力撑件上,两个助力撑件分别吻合连接在操作杆上,在对操作杆的位置进行转动调整控制,转动调盘会在的作用下带动平衡杆随之进行转动,两个助力撑件也会随着平衡杆进行滑动调节,通过两个助力撑件对操作杆进行助力支撑,使得操作杆可以稳定将物件进行夹取。
地刷回转助力装置及具有其的地刷.pdf
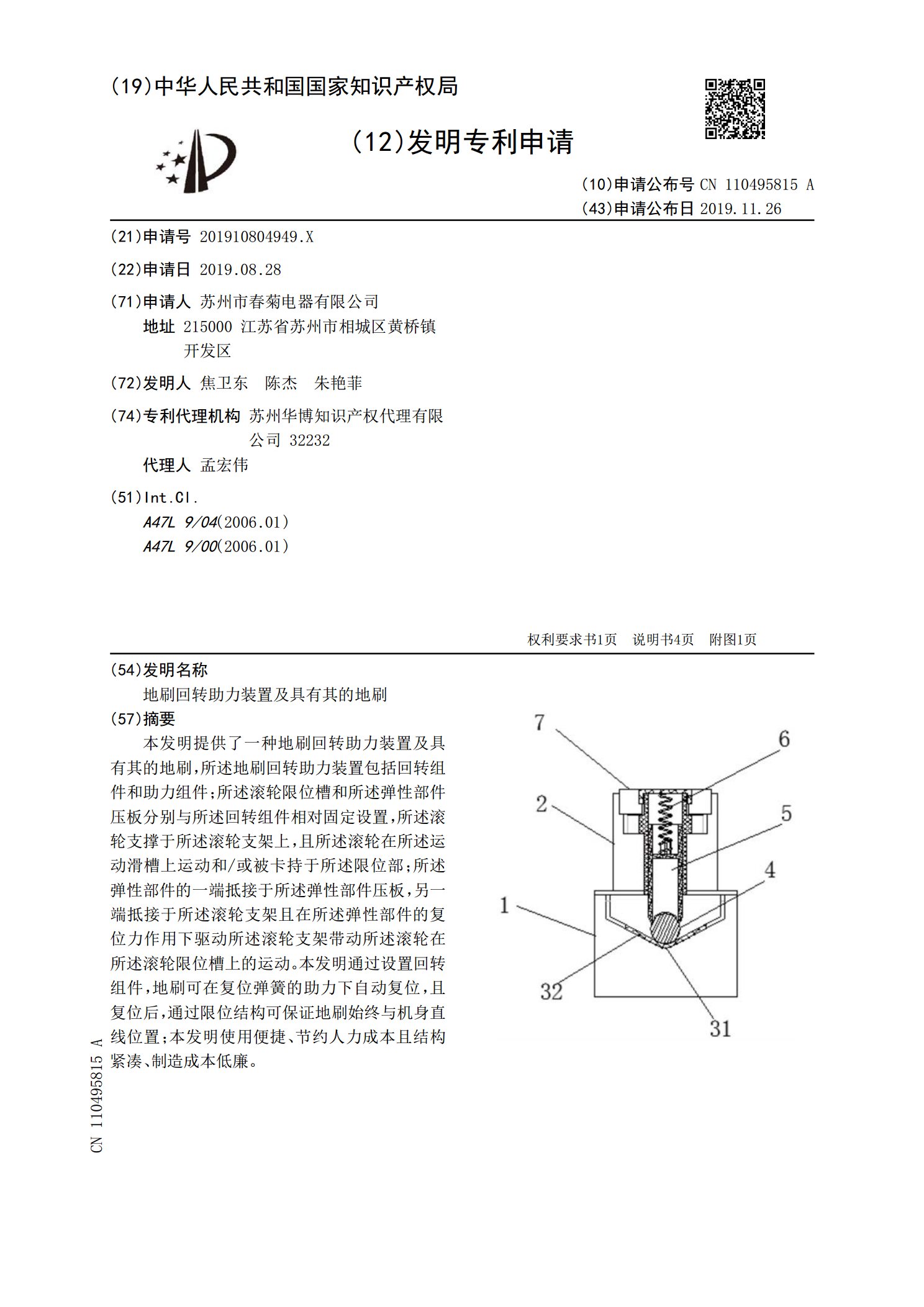
本发明提供了一种地刷回转助力装置及具有其的地刷,所述地刷回转助力装置包括回转组件和助力组件;所述滚轮限位槽和所述弹性部件压板分别与所述回转组件相对固定设置,所述滚轮支撑于所述滚轮支架上,且所述滚轮在所述运动滑槽上运动和/或被卡持于所述限位部;所述弹性部件的一端抵接于所述弹性部件压板,另一端抵接于所述滚轮支架且在所述弹性部件的复位力作用下驱动所述滚轮支架带动所述滚轮在所述滚轮限位槽上的运动。本发明通过设置回转组件,地刷可在复位弹簧的助力下自动复位,且复位后,通过限位结构可保证地刷始终与机身直线位置;本发明使

机器人伸脖子装置及具有其的机器人.pdf
本发明提供了一种机器人伸脖子装置及具有其的机器人。机器人伸脖子装置包括:底座;驱动装置,驱动装置安装在底座上;剪叉装置,剪叉装置与驱动装置驱动连接在驱动装置的驱动下实现伸缩机器人脖子的功能。本发明的机器人伸脖子装置及具有其的机器人具有同时伸脖子和弯曲脖子功能,使得机器人更为生动活泼,增加了双足智能机器人的娱乐性和仿生性。