
一种搬运机器人用抓取装置.pdf

是你****元呀


1/7
2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种搬运机器人用抓取装置.pdf
本发明公开了一种搬运机器人用抓取装置,包括机体和传送机构,所述机体连接有若干抓取组件,所述抓取组件的一侧设置有分拣机构,所述分拣机构位于抓取组件朝向传送机构传送方向的一侧。在抓取装置工作时,可先通过机体控制抓取组件移动至传送机构上方,随后控制各个分拣机构朝向传送机构移动,直至其与传送机构靠近后停止。随后可启动传送机构转动,传送机构则会将其表面的产品驱动,并通过各个分拣机构截留在各自抓取组件的正下方,以此即可在抓取组件没有配备产品追踪功能的时候,仍能保持每个抓取组件都能准确抓取产品。

一种机器人的可旋转抓取装置用抓取组件.pdf
本发明涉及一种机器人的可旋转抓取装置用抓取组件,包括均布于旋转盘下方的四个抓取件和四个伸缩气缸;抓取件包括可形成负压腔的环形吸嘴和自环形吸嘴上端部向连接板方向延伸的加强块,加强块内预埋一连接管;连接管内设有一延伸至负压腔的气体通道,环形吸嘴与待抓取物的光滑上表面接触,环形吸嘴内的气体由气体通道抽出,形成用于吸附待抓取物的真空区域;四个抓取件分别通过一伸缩气缸与旋转盘的下端面连接,旋转盘包括用于安装抓取件的盘体、固设在盘体与槽轮之间的凸台;伸缩气缸的缸体与盘体连接,伸缩气缸的伸缩杆与加强块的外壁固定连接。本

一种自动抓取的搬运机器人.pdf
本发明提供一种自动抓取的搬运机器人,涉及智能机器人领域,包括基座,基座的顶部固定安装有转动箱,转动箱内腔的底部固定安装有第一电机,第一电机通过其一端的转轴传动连接有主动轮,电机的左侧设置有转动轴,转动轴中部的外表面固定安装有与主动轮相啮合的从动轮。该自动抓取的搬运机器人,通过在连接板的底部固定安装吸盘,能使该装置在抓取物品时,先通过吸盘将物品稍稍提起,再通过连接箱两侧铰接的连接杆相互靠近,使左夹板和右夹板相互闭合,可以防止搬运的物品过重,使吸盘掉落,避免物品掉落到地上,导致损坏,通过在支撑板的底部安装栏杆
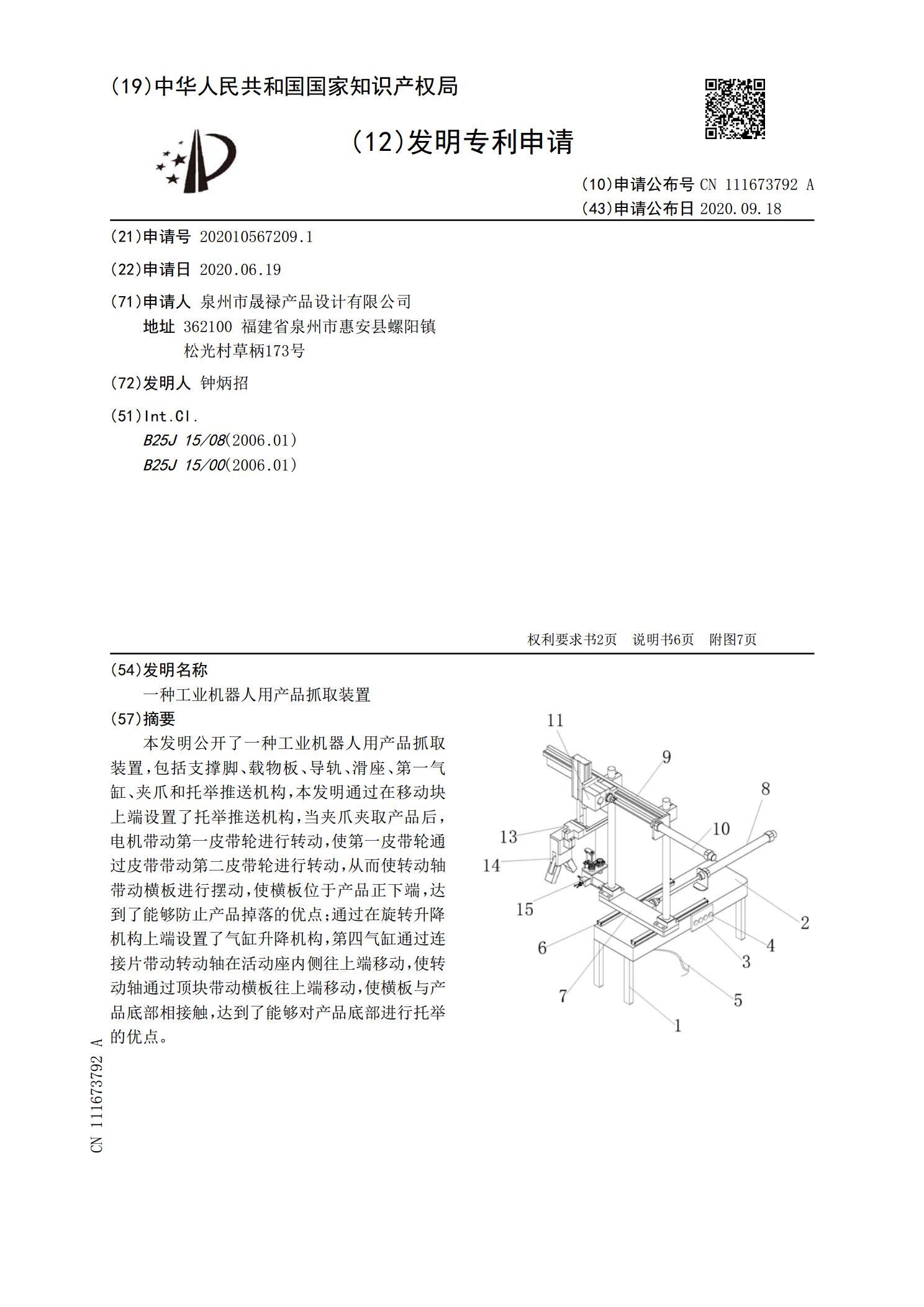
一种工业机器人用产品抓取装置.pdf
本发明公开了一种工业机器人用产品抓取装置,包括支撑脚、载物板、导轨、滑座、第一气缸、夹爪和托举推送机构,本发明通过在移动块上端设置了托举推送机构,当夹爪夹取产品后,电机带动第一皮带轮进行转动,使第一皮带轮通过皮带带动第二皮带轮进行转动,从而使转动轴带动横板进行摆动,使横板位于产品正下端,达到了能够防止产品掉落的优点;通过在旋转升降机构上端设置了气缸升降机构,第四气缸通过连接片带动转动轴在活动座内侧往上端移动,使转动轴通过顶块带动横板往上端移动,使横板与产品底部相接触,达到了能够对产品底部进行托举的优点。
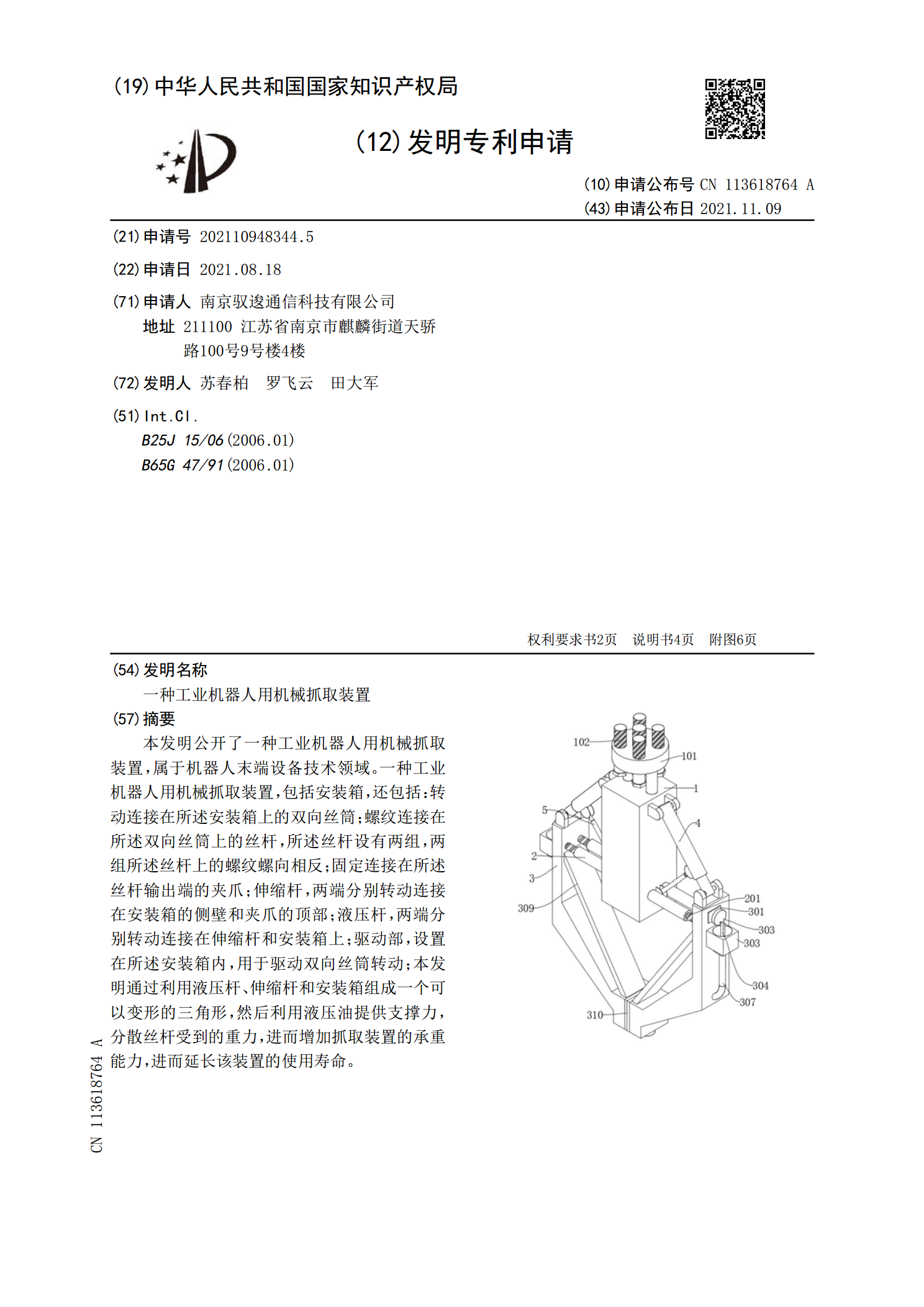
一种工业机器人用机械抓取装置.pdf
本发明公开了一种工业机器人用机械抓取装置,属于机器人末端设备技术领域。一种工业机器人用机械抓取装置,包括安装箱,还包括:转动连接在所述安装箱上的双向丝筒;螺纹连接在所述双向丝筒上的丝杆,所述丝杆设有两组,两组所述丝杆上的螺纹螺向相反;固定连接在所述丝杆输出端的夹爪;伸缩杆,两端分别转动连接在安装箱的侧壁和夹爪的顶部;液压杆,两端分别转动连接在伸缩杆和安装箱上;驱动部,设置在所述安装箱内,用于驱动双向丝筒转动;本发明通过利用液压杆、伸缩杆和安装箱组成一个可以变形的三角形,然后利用液压油提供支撑力,分散丝杆受