
一种虚实合成的激光雷达点云生成方法和装置.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种虚实合成的激光雷达点云生成方法和装置.pdf
本发明公开一种虚实合成的激光雷达点云生成方法和装置,该方法从预定义模型库中选择多个模型,按照设定的概率分布设置其形变姿态和仿射变换,并将生成的模型实例放置到真实点云场景的合理区域中,最后使用空间索引和射线投影算法重采样得到虚实合成的点云数据。该方法既保留了真实激光雷达点云的真实性,又结合了虚拟仿真场景的可配置性和灵活性,并且能够自动生成数据标注信息,缓解了真实点云数据采集效率和人工标注效率低下的问题;该方法可以快速生成大量的合成激光雷达点云,提高点云数据的生成效率,同时也为感知算法等深度学习算法提供了更多
激光雷达及生成激光点云数据的方法.pdf
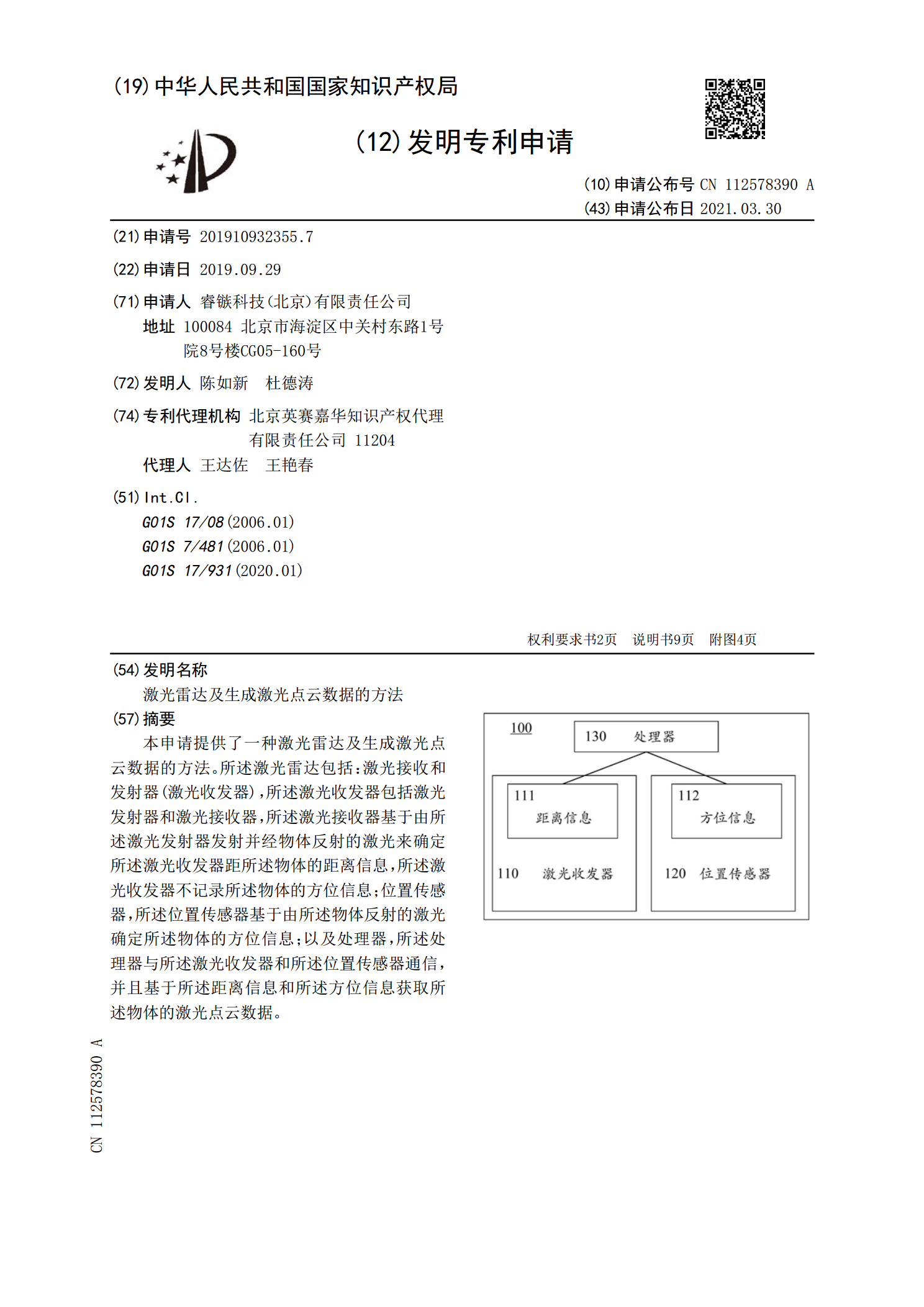
本申请提供了一种激光雷达及生成激光点云数据的方法。所述激光雷达包括:激光接收和发射器(激光收发器),所述激光收发器包括激光发射器和激光接收器,所述激光接收器基于由所述激光发射器发射并经物体反射的激光来确定所述激光收发器距所述物体的距离信息,所述激光收发器不记录所述物体的方位信息;位置传感器,所述位置传感器基于由所述物体反射的激光确定所述物体的方位信息;以及处理器,所述处理器与所述激光收发器和所述位置传感器通信,并且基于所述距离信息和所述方位信息获取所述物体的激光点云数据。

一种基于激光雷达的点云数据生成方法.pdf
本发明公开的基于激光雷达的点云数据,涉及无人驾驶技术领域,通过将激光雷达当前所处的位置点作为三维坐标系的原点,利用安装于车辆上的激光雷达发射激光,实时计算车辆与物体的距离,根据激光雷达发射的激光在垂直方向上的角度,得到该物体当前所处的位置点在三维坐标系Z轴上的坐标值,根据投影点与原点形成的线段与X轴的夹角,分别得到该物体当前所处的位置点在三维坐标系X轴上的坐标值、在三维坐标系Y轴上的坐标值,得到该物体当前所处的位置点在三维坐标系下的坐标点,根据各个物体当前所处的位置点在三维坐标系下的坐标点,生成激光雷达点

一种基于固态激光雷达点云生成深度图的方法.pdf
本发明公开了一种基于固态激光雷达点云生成深度图的方法,包括以下步骤:获取点云信息;生成粗糙深度图Range_Image和深度点集Range_Points;生成细化深度图Range_Image。上述技术方案根据距离视角中心的视角距离而非欧式距离来选择点,更符合几何意义,使得选取的点更精准,对于深度图丢失信息的坐标,综合考虑了该坐标竖直和水平方向上一定范围内点的强度和距离变化,使得利用周围信息补充该坐标信息的同时,最大可能保留边缘信息,使得生成的图像更加平滑和自然,以适配固态激光雷达,实现有效感知。
一种激光雷达点云体素化方法及装置.pdf
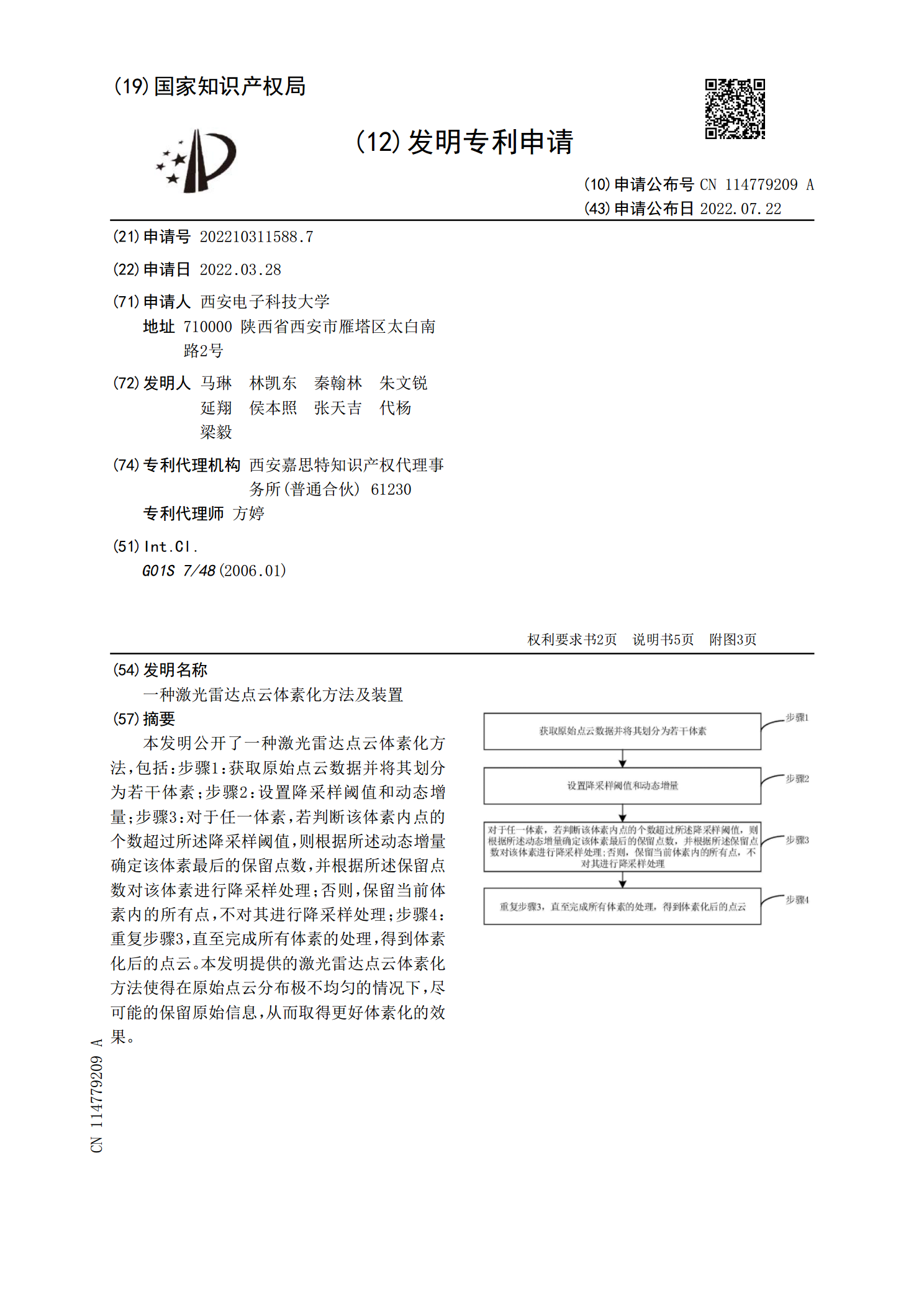
本发明公开了一种激光雷达点云体素化方法,包括:步骤1:获取原始点云数据并将其划分为若干体素;步骤2:设置降采样阈值和动态增量;步骤3:对于任一体素,若判断该体素内点的个数超过所述降采样阈值,则根据所述动态增量确定该体素最后的保留点数,并根据所述保留点数对该体素进行降采样处理;否则,保留当前体素内的所有点,不对其进行降采样处理;步骤4:重复步骤3,直至完成所有体素的处理,得到体素化后的点云。本发明提供的激光雷达点云体素化方法使得在原始点云分布极不均匀的情况下,尽可能的保留原始信息,从而取得更好体素化的效果。