
一种鸟类飞行的雷达轨迹模拟方法.pdf

一吃****瀚文


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种鸟类飞行的雷达轨迹模拟方法.pdf
本发明公开了一种鸟类飞行的雷达轨迹模拟方法,其特征在于:包括以下步骤:S1:选择要模拟的鸟类型,将带有测高和数据记录功能的差分GPS数据记录仪绑到鸟的腿上;S2:鸟飞行或者运动一段时间后,下载鸟的飞行数据;S3:将下载的鸟类的飞行数据进行过滤,去除异常数据和驻留期间的数据,保留飞行期间的数据;S4:设置要模拟的雷达的中心坐标;S5:设置鸟类航迹在雷达坐标中的起始位置;S6:将鸟的航迹数据进行坐标转换,变换为以雷达为中心的模拟鸟类数据;S7:设置雷达扫描速度;S8:将模拟鸟类数据进行插值和抽取,得到与雷达扫

一种适用于高压杆塔的鸟类飞行轨迹预测方法.pdf
本发明公开了一种适用于高压杆塔的鸟类飞行轨迹预测方法,包括下述步骤:步骤一,根据高压杆塔的架构与高压杆塔害鸟筑巢习性特点,设计驱鸟模拟装置在高压杆塔上的安放位置;步骤二,确定驱鸟模拟装置的具体安装位置;设计多个多普勒雷达在驱鸟模拟装置上的探测角度;将驱鸟模拟装置安装在杆塔的中上部,且低于横担的位置;采用四个多普勒雷达分别对立体空间中四个方向进行探测,并设计四个多普勒雷达的探测角度;本发明重点针对高压杆塔的架构与高压杆塔害鸟筑巢习性特点,有针对性的设计了一种简单高效的轨迹方向预测方法,为驱赶高压杆塔害鸟提供
一种飞行器飞行轨迹的优化方法及装置.pdf
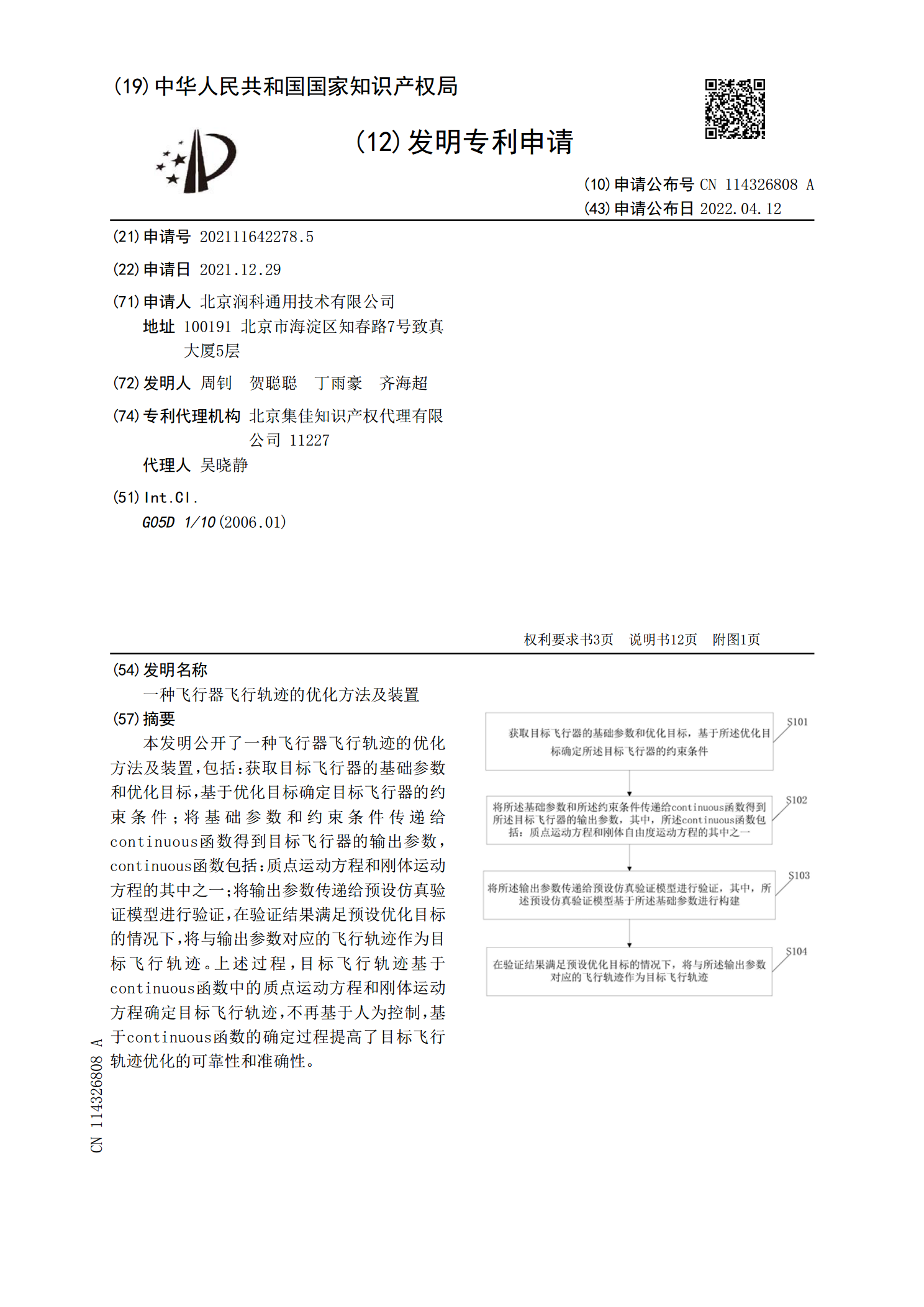
本发明公开了一种飞行器飞行轨迹的优化方法及装置,包括:获取目标飞行器的基础参数和优化目标,基于优化目标确定目标飞行器的约束条件;将基础参数和约束条件传递给continuous函数得到目标飞行器的输出参数,continuous函数包括:质点运动方程和刚体运动方程的其中之一;将输出参数传递给预设仿真验证模型进行验证,在验证结果满足预设优化目标的情况下,将与输出参数对应的飞行轨迹作为目标飞行轨迹。上述过程,目标飞行轨迹基于continuous函数中的质点运动方程和刚体运动方程确定目标飞行轨迹,不再基于人为控制,

一种用于飞行模拟器的气象雷达仿真渲染方法.pdf
本发明公开了一种用于飞行模拟器的气象雷达仿真渲染方法,该方法包括一种基于GLSL着色器语言的气象雷成像渲染系统的操作方法和基于GPU对图像渲染进行加速的实施方法。该发明的所有气象数据都是从仿真过程中视景场景实时采样而来,所以成像具备很高的实时性,同时也与飞行过程的场景数据保持一致,提高了成像的真实性。基于GLSL的气象雷达仿真渲染方法在整个计算过程中,利用了GPU的并行计算能力和渲染加速能力,并且在一开始就摒弃了通过卫星云图、查询气象局数据等这些传统的雷达成像仿真方法,直接从仿真系统的视景仿真过程中采集气

飞行轨迹重构的一种二阶滤波方法.docx
飞行轨迹重构的一种二阶滤波方法飞行轨迹重构是航空领域中的重要任务之一,它依靠收集的传感器数据来重新构建飞机的真实轨迹。对于飞行轨迹重构的任务来说,一个合适的滤波方法是十分关键的。本文将介绍一种二阶滤波方法,以提高飞行轨迹重构的准确性和精度。1.引言飞行轨迹重构是指使用传感器数据对飞机的真实轨迹进行估计和重建的过程。由于飞机飞行过程中会受到各种扰动和噪声干扰,因此需要使用滤波方法来对传感器数据进行滤波处理,以提高轨迹重构的准确性和精度。2.二阶滤波方法概述二阶滤波方法是一种常用的滤波方法,它使用飞机的动态模