
一种适用于高压杆塔的鸟类飞行轨迹预测方法.pdf

丹烟****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种适用于高压杆塔的鸟类飞行轨迹预测方法.pdf
本发明公开了一种适用于高压杆塔的鸟类飞行轨迹预测方法,包括下述步骤:步骤一,根据高压杆塔的架构与高压杆塔害鸟筑巢习性特点,设计驱鸟模拟装置在高压杆塔上的安放位置;步骤二,确定驱鸟模拟装置的具体安装位置;设计多个多普勒雷达在驱鸟模拟装置上的探测角度;将驱鸟模拟装置安装在杆塔的中上部,且低于横担的位置;采用四个多普勒雷达分别对立体空间中四个方向进行探测,并设计四个多普勒雷达的探测角度;本发明重点针对高压杆塔的架构与高压杆塔害鸟筑巢习性特点,有针对性的设计了一种简单高效的轨迹方向预测方法,为驱赶高压杆塔害鸟提供

一种鸟类飞行的雷达轨迹模拟方法.pdf
本发明公开了一种鸟类飞行的雷达轨迹模拟方法,其特征在于:包括以下步骤:S1:选择要模拟的鸟类型,将带有测高和数据记录功能的差分GPS数据记录仪绑到鸟的腿上;S2:鸟飞行或者运动一段时间后,下载鸟的飞行数据;S3:将下载的鸟类的飞行数据进行过滤,去除异常数据和驻留期间的数据,保留飞行期间的数据;S4:设置要模拟的雷达的中心坐标;S5:设置鸟类航迹在雷达坐标中的起始位置;S6:将鸟的航迹数据进行坐标转换,变换为以雷达为中心的模拟鸟类数据;S7:设置雷达扫描速度;S8:将模拟鸟类数据进行插值和抽取,得到与雷达扫

一种飞行轨迹实时预测与监视告警的实现方法.docx
一种飞行轨迹实时预测与监视告警的实现方法标题:一种基于机器学习的飞行轨迹实时预测与监视告警方法摘要:随着航空行业的不断发展,对飞行安全的要求越来越高。飞行轨迹实时预测与监视告警是提高飞行安全性的关键技术之一。本文提出了一种基于机器学习的方法,利用飞行参数数据和历史轨迹数据,实现了飞行轨迹的实时预测和监视告警。通过对预测误差分析和告警策略的优化,能够准确预测飞行轨迹,并在出现异常情况时及时发出告警,提高飞行安全性。1.引言1.1背景1.2目标和意义1.3文章结构2.相关工作综述2.1飞行轨迹预测方法2.2飞
一种飞行器飞行轨迹的优化方法及装置.pdf
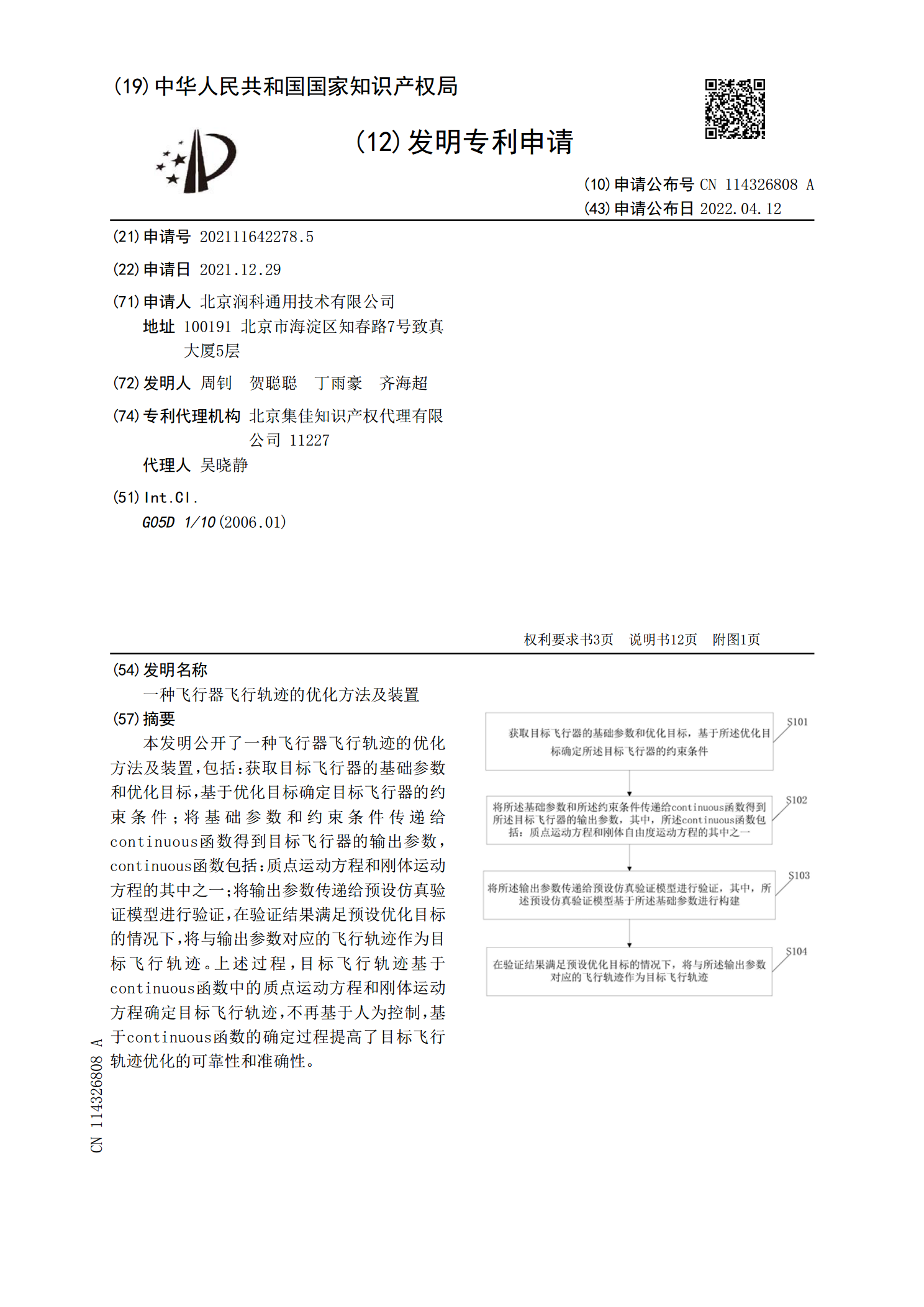
本发明公开了一种飞行器飞行轨迹的优化方法及装置,包括:获取目标飞行器的基础参数和优化目标,基于优化目标确定目标飞行器的约束条件;将基础参数和约束条件传递给continuous函数得到目标飞行器的输出参数,continuous函数包括:质点运动方程和刚体运动方程的其中之一;将输出参数传递给预设仿真验证模型进行验证,在验证结果满足预设优化目标的情况下,将与输出参数对应的飞行轨迹作为目标飞行轨迹。上述过程,目标飞行轨迹基于continuous函数中的质点运动方程和刚体运动方程确定目标飞行轨迹,不再基于人为控制,

四维飞行轨迹预测方法的研究.docx
四维飞行轨迹预测方法的研究四维飞行轨迹预测方法的研究摘要:随着航空业的蓬勃发展,飞行轨迹预测成为了一个重要的研究领域。本论文旨在讨论四维飞行轨迹预测方法,包括数据采集、轨迹建模和预测算法。通过对相关文献和研究进行综述,本论文提出了一种基于机器学习的方法来预测飞行轨迹,在各种应用场景中取得了良好的效果。本文还讨论了该方法的优缺点以及未来的研究方向。引言:飞行轨迹预测是航空业中的一个核心问题,对于飞行安全、航班调度和航空交通管制等方面都具有重要意义。由于航空交通系统的复杂性和不确定性,准确预测飞行轨迹是一项具