
飞行轨迹重构的一种二阶滤波方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

飞行轨迹重构的一种二阶滤波方法.docx
飞行轨迹重构的一种二阶滤波方法飞行轨迹重构是航空领域中的重要任务之一,它依靠收集的传感器数据来重新构建飞机的真实轨迹。对于飞行轨迹重构的任务来说,一个合适的滤波方法是十分关键的。本文将介绍一种二阶滤波方法,以提高飞行轨迹重构的准确性和精度。1.引言飞行轨迹重构是指使用传感器数据对飞机的真实轨迹进行估计和重建的过程。由于飞机飞行过程中会受到各种扰动和噪声干扰,因此需要使用滤波方法来对传感器数据进行滤波处理,以提高轨迹重构的准确性和精度。2.二阶滤波方法概述二阶滤波方法是一种常用的滤波方法,它使用飞机的动态模

飞行轨迹重构研究.docx
飞行轨迹重构研究飞行轨迹重构研究摘要:飞行轨迹的精确重构对于飞行器的导航、控制和安全至关重要。本论文在对飞行轨迹重构的研究进行总结的基础上,探讨了飞行轨迹重构的意义、挑战和技术方法,并评估了当前研究的进展和未来的发展方向。关键词:飞行轨迹重构;导航;控制;安全;技术方法引言飞行轨迹重构是指根据已有的飞行数据和相关参数,重新构建和恢复飞行器的精确航迹。飞行轨迹的准确重构在航空与航天领域中具有重要意义。精确的飞行轨迹重构能够帮助飞行器提高导航和定位精度,提高控制能力,确保飞行安全。随着航空技术的进步和航空器的
一种飞行器飞行轨迹的优化方法及装置.pdf
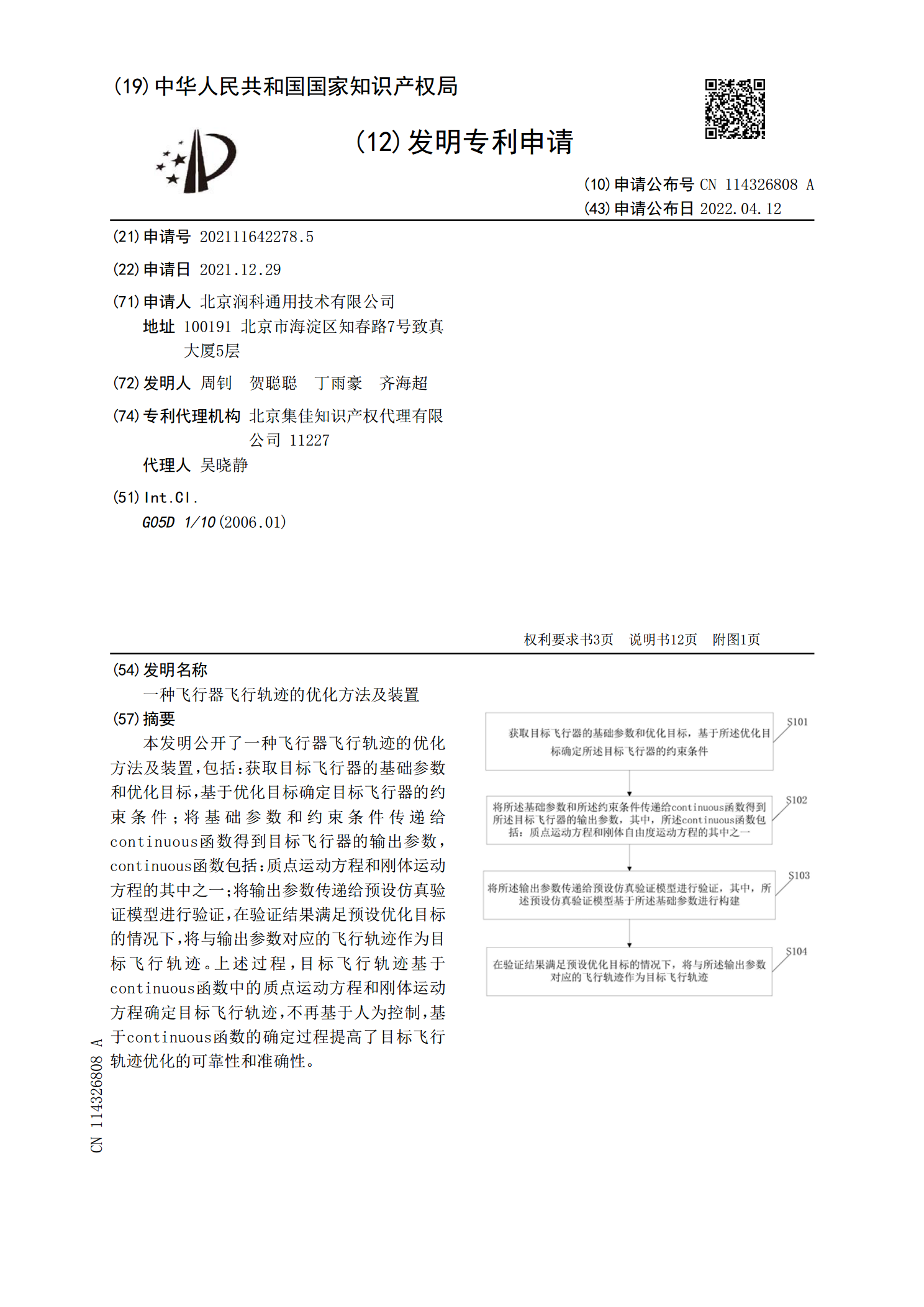
本发明公开了一种飞行器飞行轨迹的优化方法及装置,包括:获取目标飞行器的基础参数和优化目标,基于优化目标确定目标飞行器的约束条件;将基础参数和约束条件传递给continuous函数得到目标飞行器的输出参数,continuous函数包括:质点运动方程和刚体运动方程的其中之一;将输出参数传递给预设仿真验证模型进行验证,在验证结果满足预设优化目标的情况下,将与输出参数对应的飞行轨迹作为目标飞行轨迹。上述过程,目标飞行轨迹基于continuous函数中的质点运动方程和刚体运动方程确定目标飞行轨迹,不再基于人为控制,

一种鸟类飞行的雷达轨迹模拟方法.pdf
本发明公开了一种鸟类飞行的雷达轨迹模拟方法,其特征在于:包括以下步骤:S1:选择要模拟的鸟类型,将带有测高和数据记录功能的差分GPS数据记录仪绑到鸟的腿上;S2:鸟飞行或者运动一段时间后,下载鸟的飞行数据;S3:将下载的鸟类的飞行数据进行过滤,去除异常数据和驻留期间的数据,保留飞行期间的数据;S4:设置要模拟的雷达的中心坐标;S5:设置鸟类航迹在雷达坐标中的起始位置;S6:将鸟的航迹数据进行坐标转换,变换为以雷达为中心的模拟鸟类数据;S7:设置雷达扫描速度;S8:将模拟鸟类数据进行插值和抽取,得到与雷达扫

一种基于曲率滤波的表面重构方法.pdf
本发明公开了一种基于曲率滤波的表面重构方法,属于表面重构技术领域,特别涉及一种通过单张数字影像的表面重构方法。该方法首先固定合适的光源方向,通过数字图像采集设备拍摄被测表面;随后将二维数字影像通过Mongepatch方法嵌入到三维空间;定义了8个方向上的方向曲率,从而提出了一种线性近似的方向曲率计算方法;通过灰度信息的变化隐性的进行曲率的滤波;随后通过这种曲率的滤波对影致留形方法中的光滑约束项进行替代,从而提出了一种曲率滤波影致留形方法;在迭代终止条件的约束上采用全平均曲率进行限定,保留原始曲面信息。该