
一种飞行器飞行轨迹的优化方法及装置.pdf

含秀****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种飞行器飞行轨迹的优化方法及装置.pdf
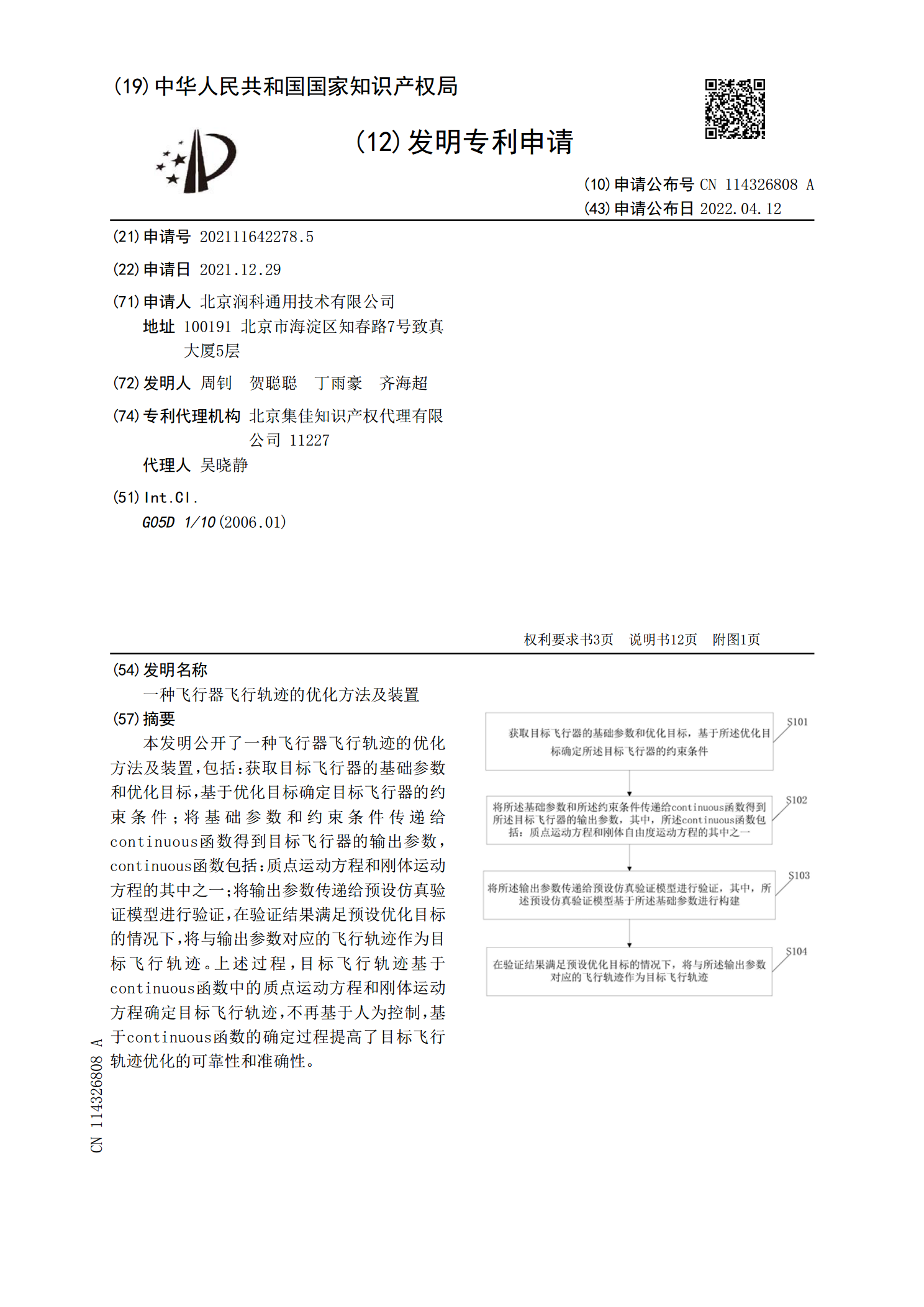
本发明公开了一种飞行器飞行轨迹的优化方法及装置,包括:获取目标飞行器的基础参数和优化目标,基于优化目标确定目标飞行器的约束条件;将基础参数和约束条件传递给continuous函数得到目标飞行器的输出参数,continuous函数包括:质点运动方程和刚体运动方程的其中之一;将输出参数传递给预设仿真验证模型进行验证,在验证结果满足预设优化目标的情况下,将与输出参数对应的飞行轨迹作为目标飞行轨迹。上述过程,目标飞行轨迹基于continuous函数中的质点运动方程和刚体运动方程确定目标飞行轨迹,不再基于人为控制,

飞行器轨迹优化的造型降维方法.docx
飞行器轨迹优化的造型降维方法飞行器轨迹优化的造型降维方法随着人们对飞行器精度要求和能源效率的不断提高,飞行器轨迹优化技术逐渐成为航空领域中一个研究热点。与此同时,为了优化飞行器轨迹设计,常常需要对其造型进行降维处理,以便更好地进行计算和分析。这篇论文将介绍一种新的飞行器轨迹优化的造型降维方法。首先,我们需要先了解什么是飞行器的轨迹优化。飞行器的轨迹优化是指通过优化飞行器的轨迹,以达到以下目标:最大限度地减少能源消耗、最大程度地提高飞行器航行速度、在保证安全的前提下缩短飞行器的旅行时间等。因此,轨迹的优化决

飞行器轨迹优化技术综述.doc
第期飞行力学飞行器轨迹优化方法综述陈功,傅瑜,郭继峰(哈尔滨工业大学航天工程系,哈尔滨150001)摘要:飞行器轨迹优化是飞行器总体设计的关键环节,特别是在现代空间飞行器和高超声速飞行器设计过程中发挥着重要作用。本文在全面调研国内外现有轨迹优化技术的基础上,提出了飞行器轨迹优化新的分类方式,概述了多种飞行器轨迹优化的原理和应用,并详细分析了各自的优缺点和发展趋势。最后介绍了现在实际应用的多种轨迹优化软件。关键词:轨迹优化;最优控制;高超声速飞行器;优化软件中图分类号:V412.1文献标识码

高超声速飞行器机载轨迹规划方法、装置、飞行器及介质.pdf
高超声速飞行器机载轨迹规划方法、装置、飞行器及介质,将高超声速飞行器的再入滑翔段运动方程作为其轨迹规划问题的训练环境;构建所述轨迹规划问题的状态空间和策略动作空间、环境动态转移函数、奖励函数以及折扣因子;利用深度强化学习算法对所述轨迹规划问题的神经网络进行训练。将飞行过程中获得的状态空间输入到训练好的Actor网络,获得策略动作空间,使高超声速飞行器将按照所述策略动作空间飞行至预定的目标区域,完成再入滑翔段飞行任务。本发明利用人工智能算法在实现了高超声速飞行器滑翔段机载实时轨迹规划,提高了飞行器的任务适应

飞行器轨迹优化数值解法综述.docx
飞行器轨迹优化数值解法综述飞行器轨迹优化是飞行器设计、控制和规划中的关键问题之一,对于确保飞行器的稳定性、安全性和效率至关重要。在过去的几十年中,学术界和工业界对飞行器轨迹优化问题进行了广泛的研究,并提出了许多数值解法来解决这个问题。本文将对飞行器轨迹优化的数值解法进行综述,主要介绍了常用的优化算法、问题建模方法和最新研究进展。飞行器轨迹优化问题通常可以分为多个子问题,包括路径规划、轨迹生成和轨迹追踪等。在这些子问题的解决过程中,优化算法起着重要的作用。常用的优化算法包括遗传算法、粒子群算法、模拟退火算法