
一种输电线路观冰机器人及其越障方法.pdf

兴朝****45


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种输电线路观冰机器人及其越障方法.pdf
本发明公开了一种输电线路观冰机器人及其越障方法,包括左动力臂、中动力臂、电磁感应取电模块、右动力臂、越障底板和夹紧装置,左动力臂、中动力臂和右动力臂依次交错布置,左动力臂和右动力臂安装在越障底板上,中动力臂和电磁感应取电模块安装在横向驱动机构上,横向驱动机构安装在越障底板上,左动力臂、中动力臂和右动力臂均安装有夹紧高压线的夹紧装置。本发明采用对称模块化设计,实现在高压线上行走、爬行、越障、充电等功能,在越障过程中只需要确定机械臂留出离线空间的位置;并且整个越障过程,由于推杆和丝杠运动均采用平动的方式,所以

一种输电线路作业用可越障机器人及其越障方法.pdf
本发明提供了一种输电线路作业用的可越障机器人及其越障方法,该机器人包括机身、前摆臂、后摆臂、前滚轮、后滚轮、前臂滑块、后臂滑块和辅助臂,当机器人感知探测器探测障碍物存在时,首先将两个前臂的“轮式手”松开导线,接下来将两个臂向外摆,转过180度后绕过障碍物,再次抓握导线,此时已越过障碍。后两臂采用同样方法跨越障碍。机器人跨越障碍后,再将四支臂“倒”回来,为下次越障做准备。该机器人既适合单导线,也适合多分裂导线,还可完成多种作业要求。该方法步骤清晰、简单。所有驱动电机均为顺序工作状态,无需多电机联动
一种架空输电线路巡检机器人越障装置及越障方法.pdf
本发明涉及一种架空输电线路巡检机器人越障装置及越障方法,其中越障装置包括巡检机器人机体、摆动机架、复位装置和驱动臂,所述摆动支架为两个,分别安装在巡检机器人机体两端,摆动支架可绕巡检机器人机体轴线运动,每个所述摆动机架的不同侧错位安装复位装置,每个复位装置连接有驱动臂,驱动臂可相对摆动机架转动。本发明的越障装置在越障过程中行走轮无需通过脱线实现跨越障碍物,可直接从障碍物上面或侧面越过,避免脱线而导致越障失败,巡检效率高,机器人运行平稳且可靠性高。

一种新型输电线路行走机器人及越障方法.pdf
本发明公开了一种新型输电线路行走机器人及越障方法,涉及巡线机器人领域,该新型输电线路行走机器人包括4个行走轮、两根连杆和一个下箱体,能在输电线路上以预想的速度前进、具有一定的爬坡能力、能够跨越输电线路上的防震锤、线夹、绝缘子等障碍物的多种功能,可作为一种巡线机器人,在行走过程中,将线路各种数据通过传感器传送至计算机,供工作人员分析研究,以确定线路工作状态,据此采取措施保证线路正常运行,安装上相应除冰装置后,还可实现清除输电线路上覆冰的功能。
一种输电线巡检越障机器人及其控制方法.pdf
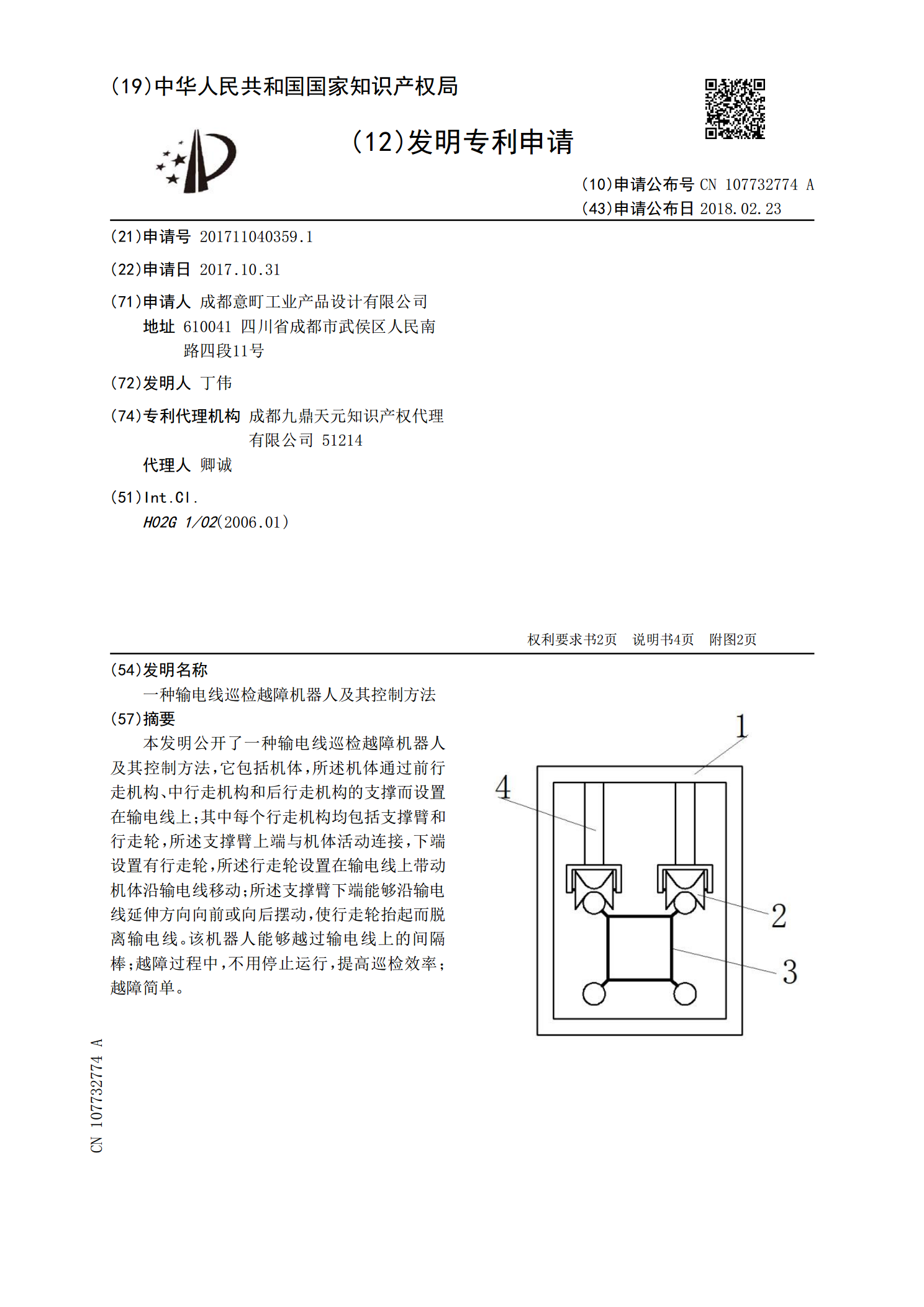
本发明公开了一种输电线巡检越障机器人及其控制方法,它包括机体,所述机体通过前行走机构、中行走机构和后行走机构的支撑而设置在输电线上;其中每个行走机构均包括支撑臂和行走轮,所述支撑臂上端与机体活动连接,下端设置有行走轮,所述行走轮设置在输电线上带动机体沿输电线移动;所述支撑臂下端能够沿输电线延伸方向向前或向后摆动,使行走轮抬起而脱离输电线。该机器人能够越过输电线上的间隔棒;越障过程中,不用停止运行,提高巡检效率;越障简单。