
一种架空输电线路巡检机器人越障装置及越障方法.pdf

一吃****永贺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种架空输电线路巡检机器人越障装置及越障方法.pdf
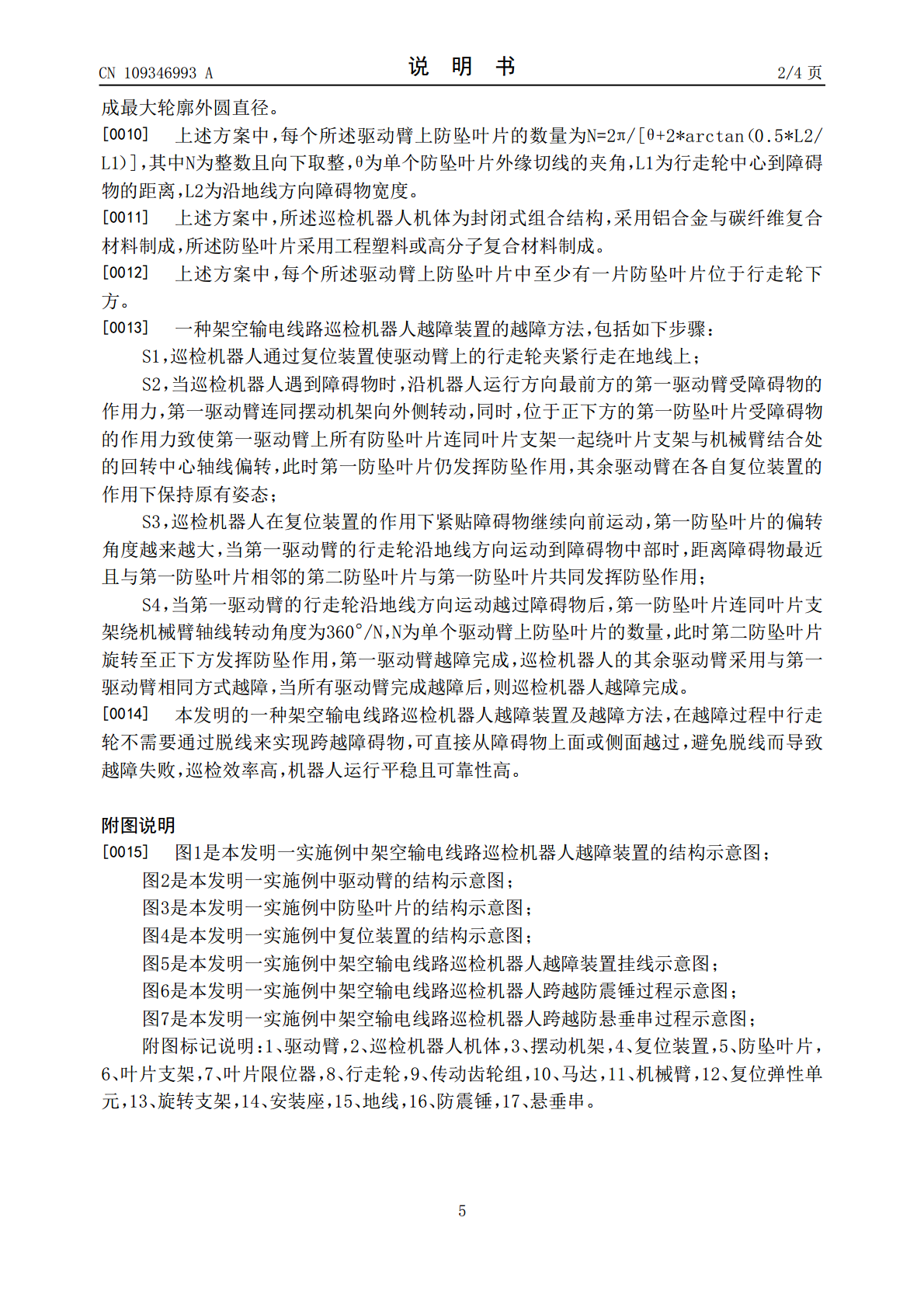
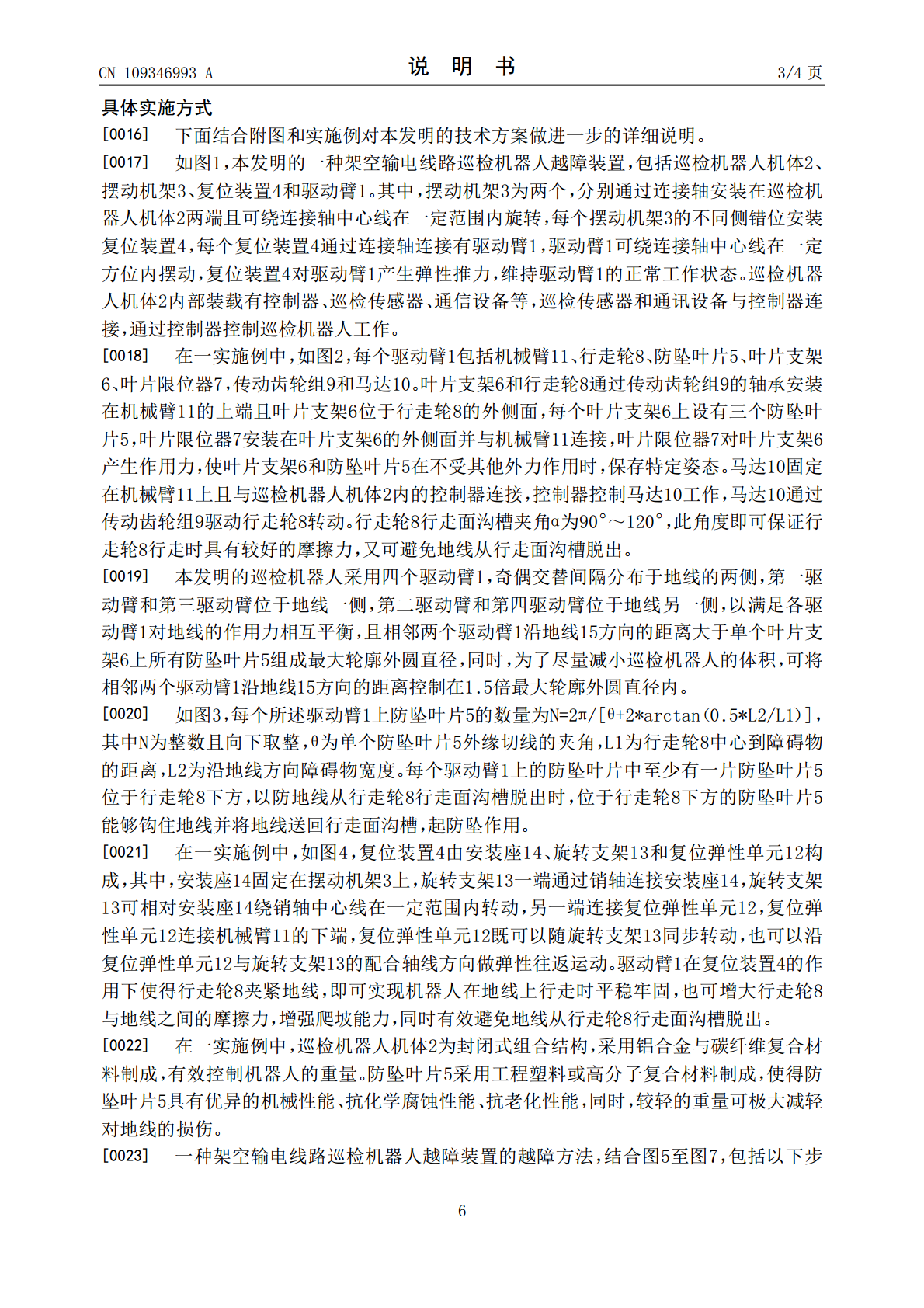
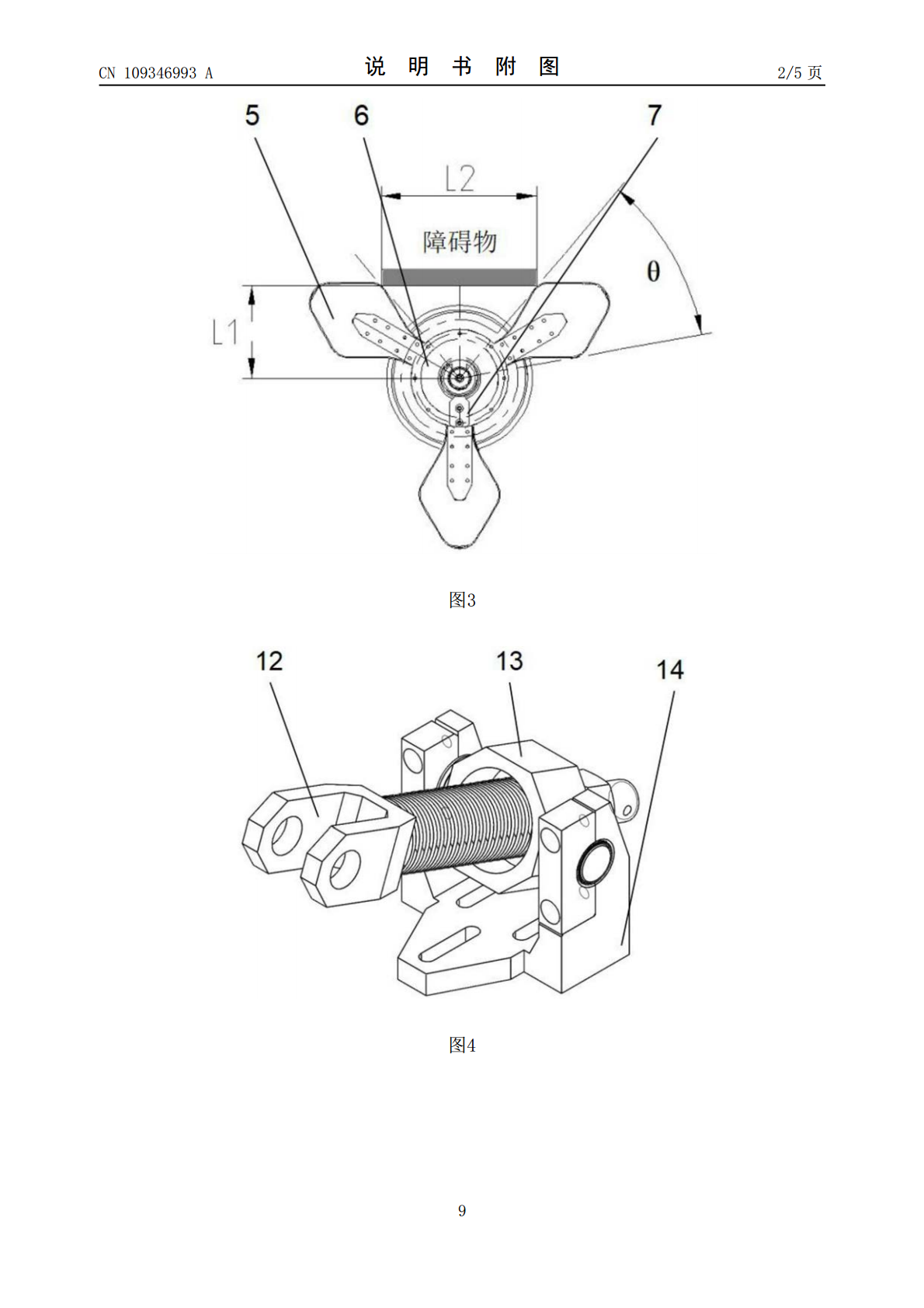
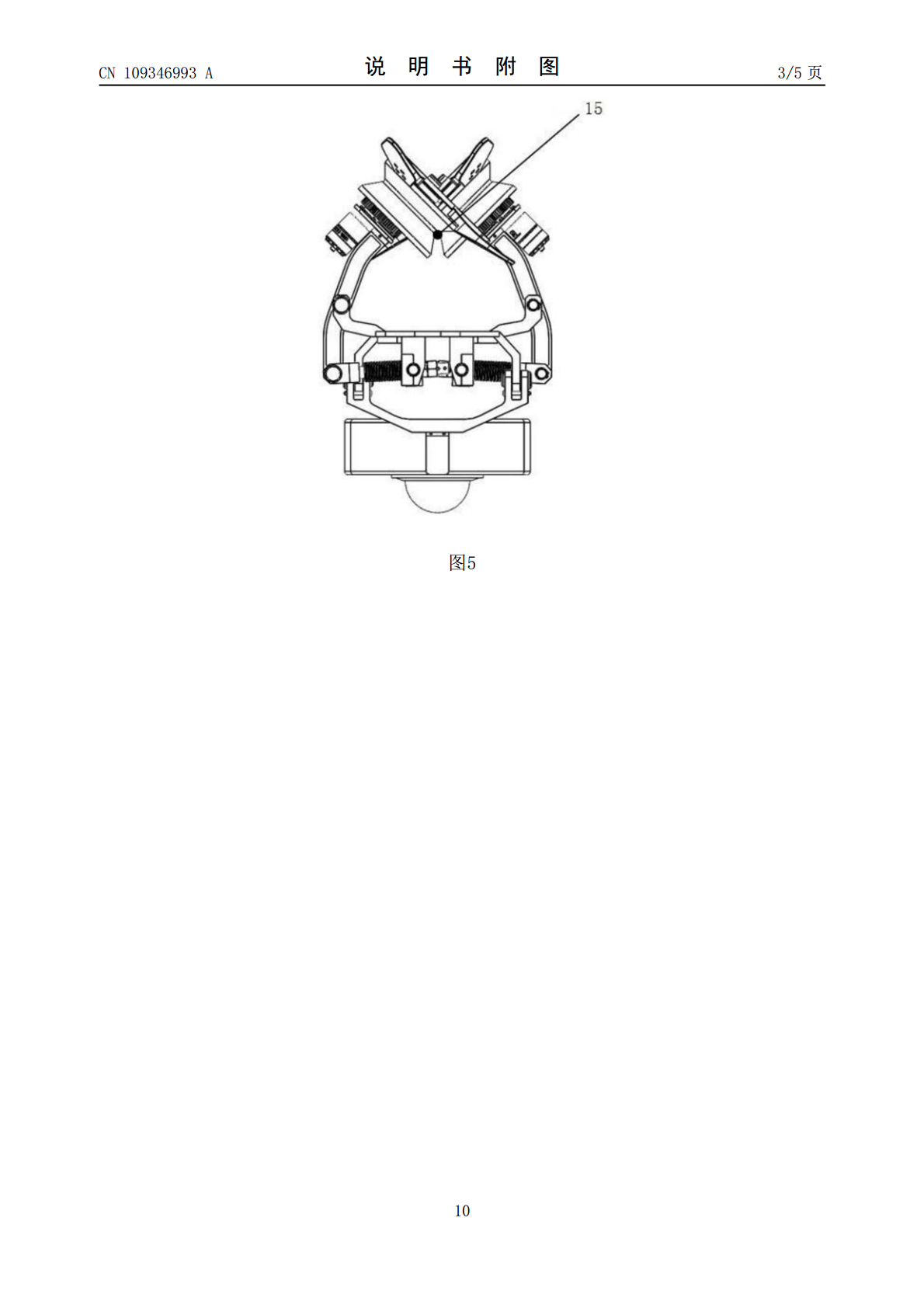
本发明涉及一种架空输电线路巡检机器人越障装置及越障方法,其中越障装置包括巡检机器人机体、摆动机架、复位装置和驱动臂,所述摆动支架为两个,分别安装在巡检机器人机体两端,摆动支架可绕巡检机器人机体轴线运动,每个所述摆动机架的不同侧错位安装复位装置,每个复位装置连接有驱动臂,驱动臂可相对摆动机架转动。本发明的越障装置在越障过程中行走轮无需通过脱线实现跨越障碍物,可直接从障碍物上面或侧面越过,避免脱线而导致越障失败,巡检效率高,机器人运行平稳且可靠性高。
一种架空输电线路轮式巡检机器人用杆塔越障桥.pdf
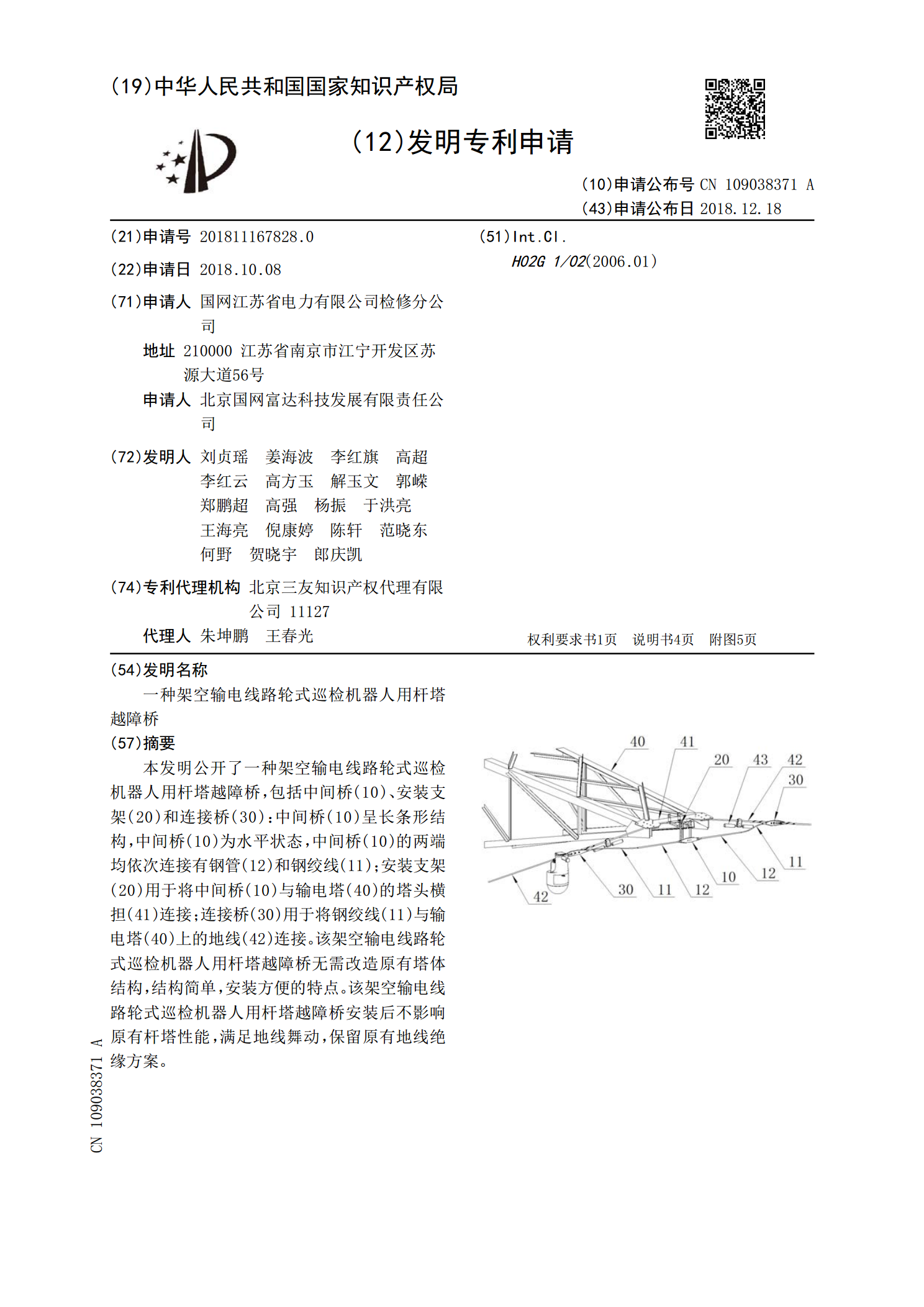
本发明公开了一种架空输电线路轮式巡检机器人用杆塔越障桥,包括中间桥(10)、安装支架(20)和连接桥(30):中间桥(10)呈长条形结构,中间桥(10)为水平状态,中间桥(10)的两端均依次连接有钢管(12)和钢绞线(11);安装支架(20)用于将中间桥(10)与输电塔(40)的塔头横担(41)连接;连接桥(30)用于将钢绞线(11)与输电塔(40)上的地线(42)连接。该架空输电线路轮式巡检机器人用杆塔越障桥无需改造原有塔体结构,结构简单,安装方便的特点。该架空输电线路轮式巡检机器人用杆塔越障桥安装后不

一种输电线路作业用可越障机器人及其越障方法.pdf
本发明提供了一种输电线路作业用的可越障机器人及其越障方法,该机器人包括机身、前摆臂、后摆臂、前滚轮、后滚轮、前臂滑块、后臂滑块和辅助臂,当机器人感知探测器探测障碍物存在时,首先将两个前臂的“轮式手”松开导线,接下来将两个臂向外摆,转过180度后绕过障碍物,再次抓握导线,此时已越过障碍。后两臂采用同样方法跨越障碍。机器人跨越障碍后,再将四支臂“倒”回来,为下次越障做准备。该机器人既适合单导线,也适合多分裂导线,还可完成多种作业要求。该方法步骤清晰、简单。所有驱动电机均为顺序工作状态,无需多电机联动
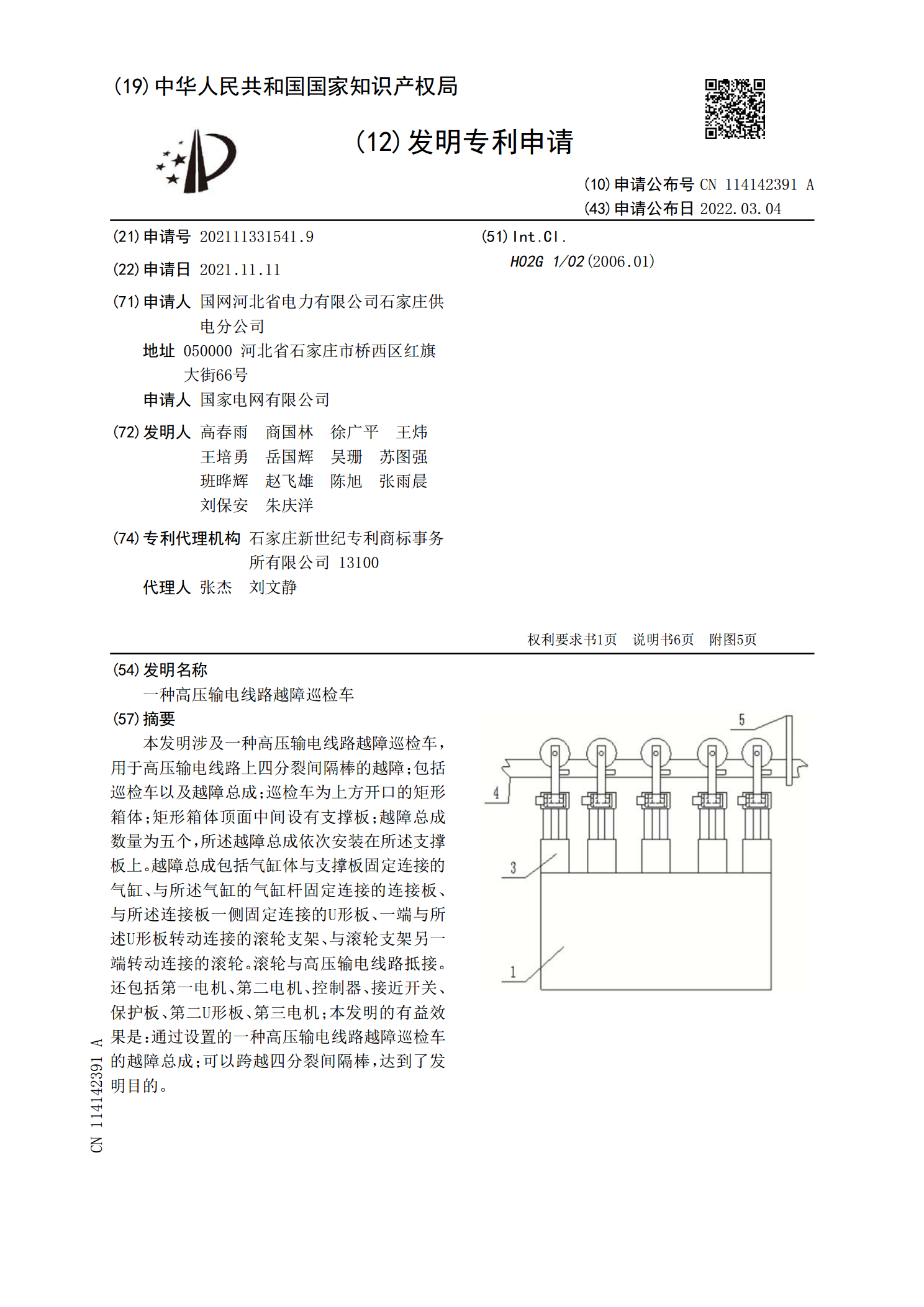
一种高压输电线路越障巡检车.pdf
本发明涉及一种高压输电线路越障巡检车,用于高压输电线路上四分裂间隔棒的越障;包括巡检车以及越障总成;巡检车为上方开口的矩形箱体;矩形箱体顶面中间设有支撑板;越障总成数量为五个,所述越障总成依次安装在所述支撑板上。越障总成包括气缸体与支撑板固定连接的气缸、与所述气缸的气缸杆固定连接的连接板、与所述连接板一侧固定连接的U形板、一端与所述U形板转动连接的滚轮支架、与滚轮支架另一端转动连接的滚轮。滚轮与高压输电线路抵接。还包括第一电机、第二电机、控制器、接近开关、保护板、第二U形板、第三电机;本发明的有益效果是:
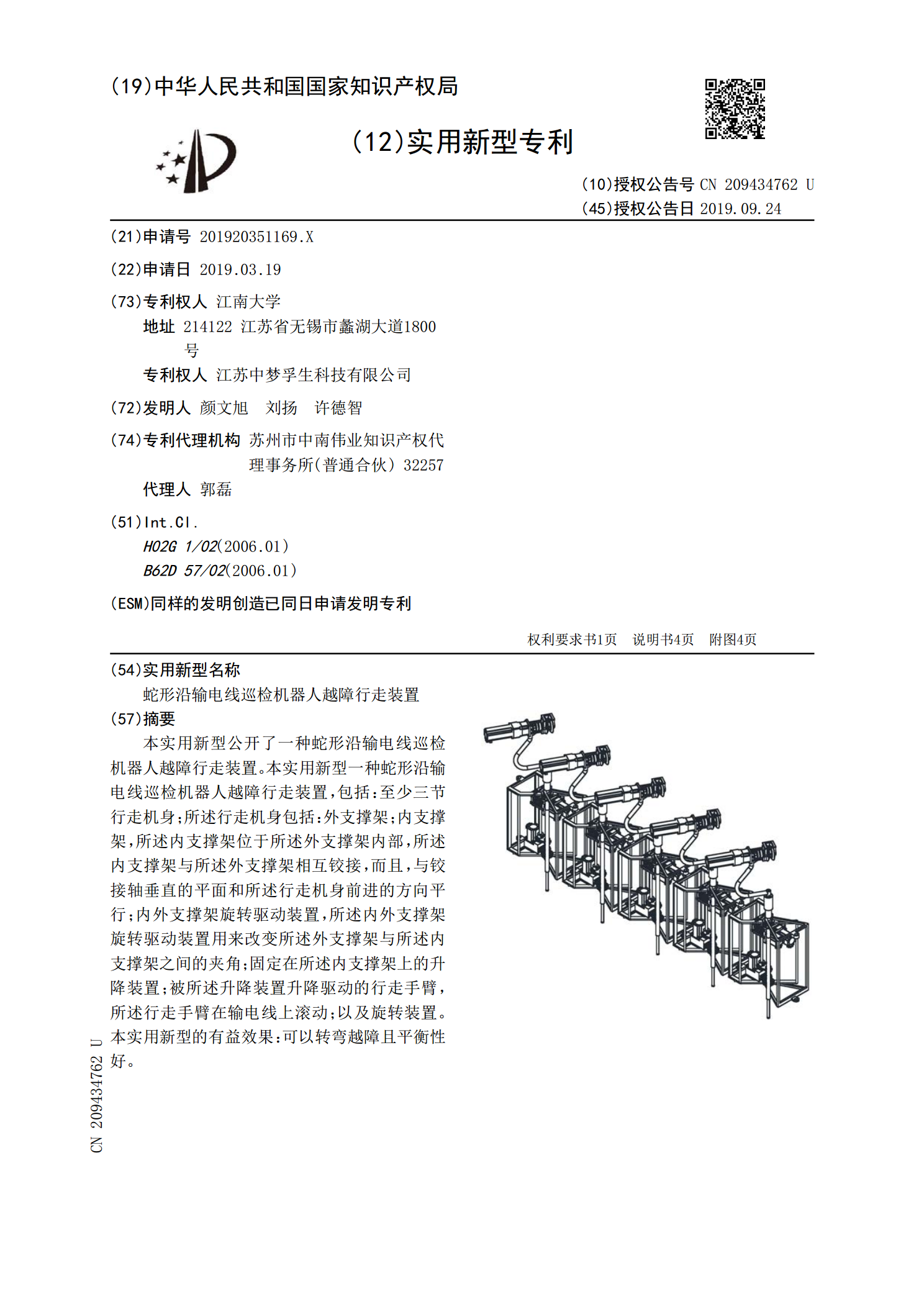
蛇形沿输电线巡检机器人越障行走装置.pdf
本实用新型公开了一种蛇形沿输电线巡检机器人越障行走装置。本实用新型一种蛇形沿输电线巡检机器人越障行走装置,包括:至少三节行走机身;所述行走机身包括:外支撑架;内支撑架,所述内支撑架位于所述外支撑架内部,所述内支撑架与所述外支撑架相互铰接,而且,与铰接轴垂直的平面和所述行走机身前进的方向平行;内外支撑架旋转驱动装置,所述内外支撑架旋转驱动装置用来改变所述外支撑架与所述内支撑架之间的夹角;固定在所述内支撑架上的升降装置;被所述升降装置升降驱动的行走手臂,所述行走手臂在输电线上滚动;以及旋转装置。本实用新型的有