
深度图像去噪方法、电子设备及存储介质.pdf

葫芦****io


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

深度图像去噪方法、电子设备及存储介质.pdf
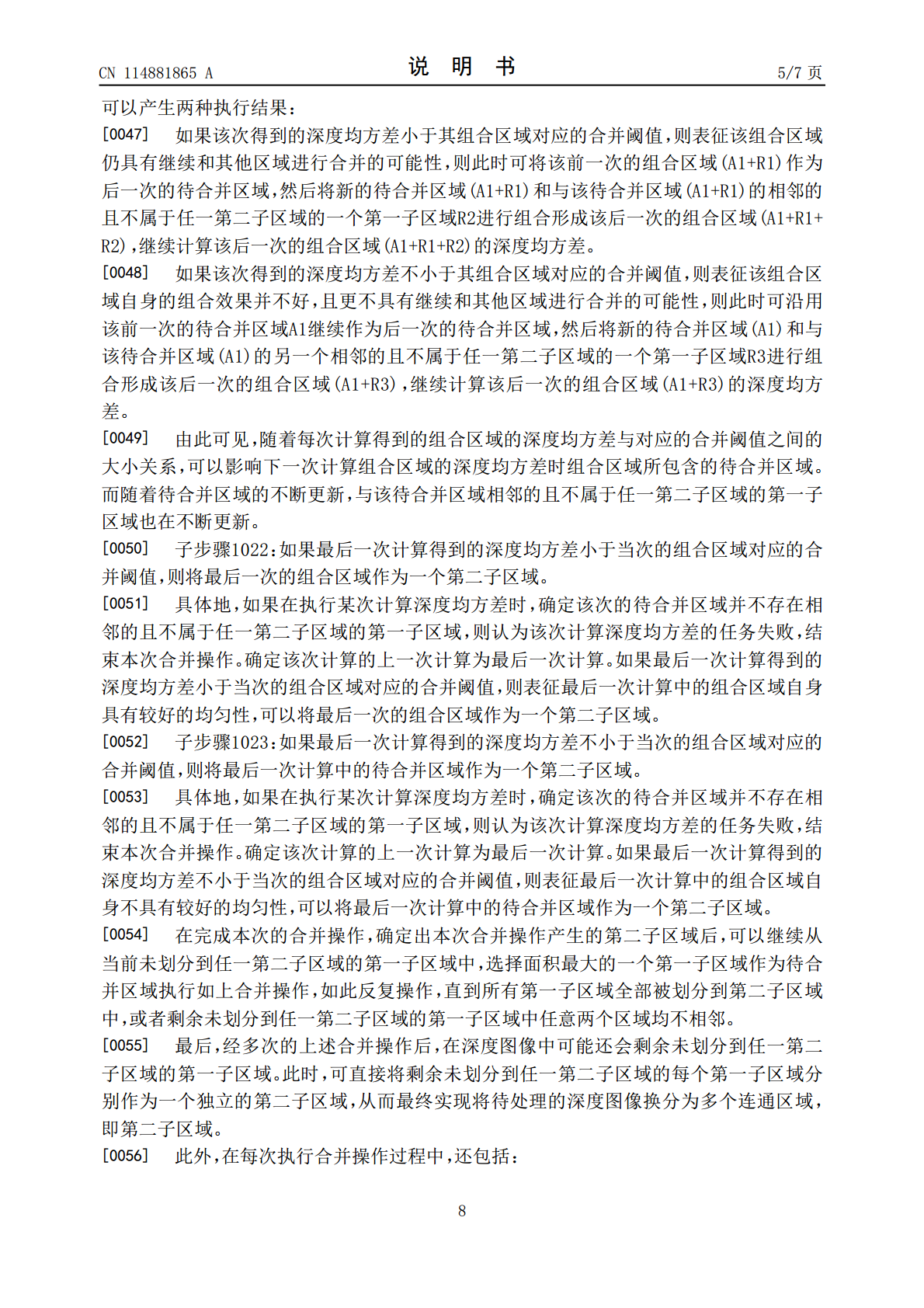
本发明实施例涉及图像处理领域,公开了一种深度图像去噪方法、电子设备及存储介质,其中方法包括:对待处理的深度图像按预设的拆分规则进行分级拆分,形成多个第一子区域;每个第一子区域为所述分级拆分过程中得到的不可进一步拆分的区域;对所述多个第一子区域按预设的合并规则进行分级合并,形成多个第二子区域;每个第二子区域为所述分级合并过程中得到的不可进一步合并的区域;将所述多个第二子区域中面积小于面积阈值的第二子区域确定为噪声区域,并对所述噪声区域进行去噪处理。本方案能够在尽可能保留正确区域深度值的基础上达到高效去除深度
深度图像去噪方法、装置、电子设备和存储介质.pdf
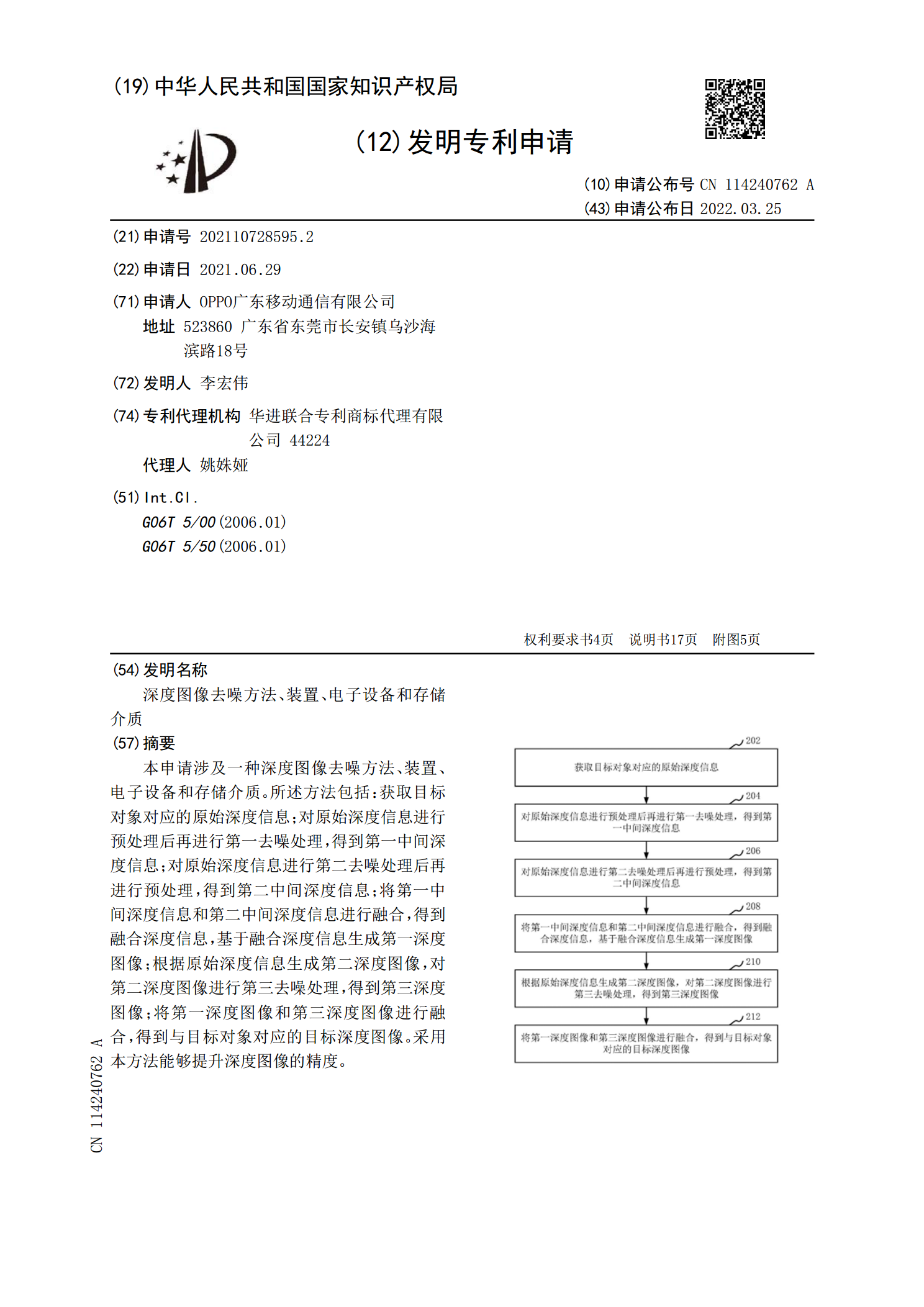
本申请涉及一种深度图像去噪方法、装置、电子设备和存储介质。所述方法包括:获取目标对象对应的原始深度信息;对原始深度信息进行预处理后再进行第一去噪处理,得到第一中间深度信息;对原始深度信息进行第二去噪处理后再进行预处理,得到第二中间深度信息;将第一中间深度信息和第二中间深度信息进行融合,得到融合深度信息,基于融合深度信息生成第一深度图像;根据原始深度信息生成第二深度图像,对第二深度图像进行第三去噪处理,得到第三深度图像;将第一深度图像和第三深度图像进行融合,得到与目标对象对应的目标深度图像。采用本方法能够提
图像去噪方法、电子设备及存储介质.pdf
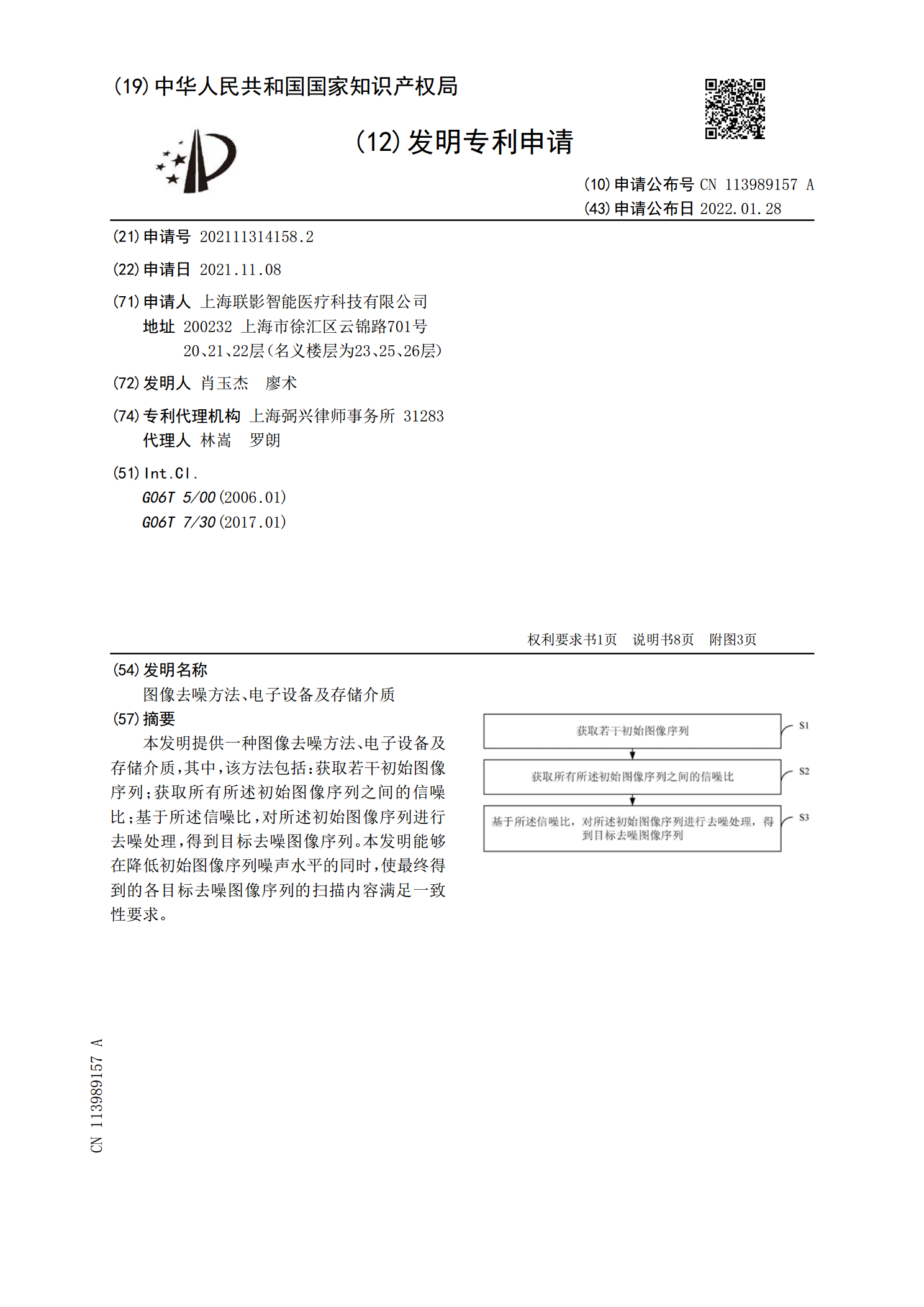
本发明提供一种图像去噪方法、电子设备及存储介质,其中,该方法包括:获取若干初始图像序列;获取所有所述初始图像序列之间的信噪比;基于所述信噪比,对所述初始图像序列进行去噪处理,得到目标去噪图像序列。本发明能够在降低初始图像序列噪声水平的同时,使最终得到的各目标去噪图像序列的扫描内容满足一致性要求。
图像去噪方法、装置、电子设备与存储介质.pdf
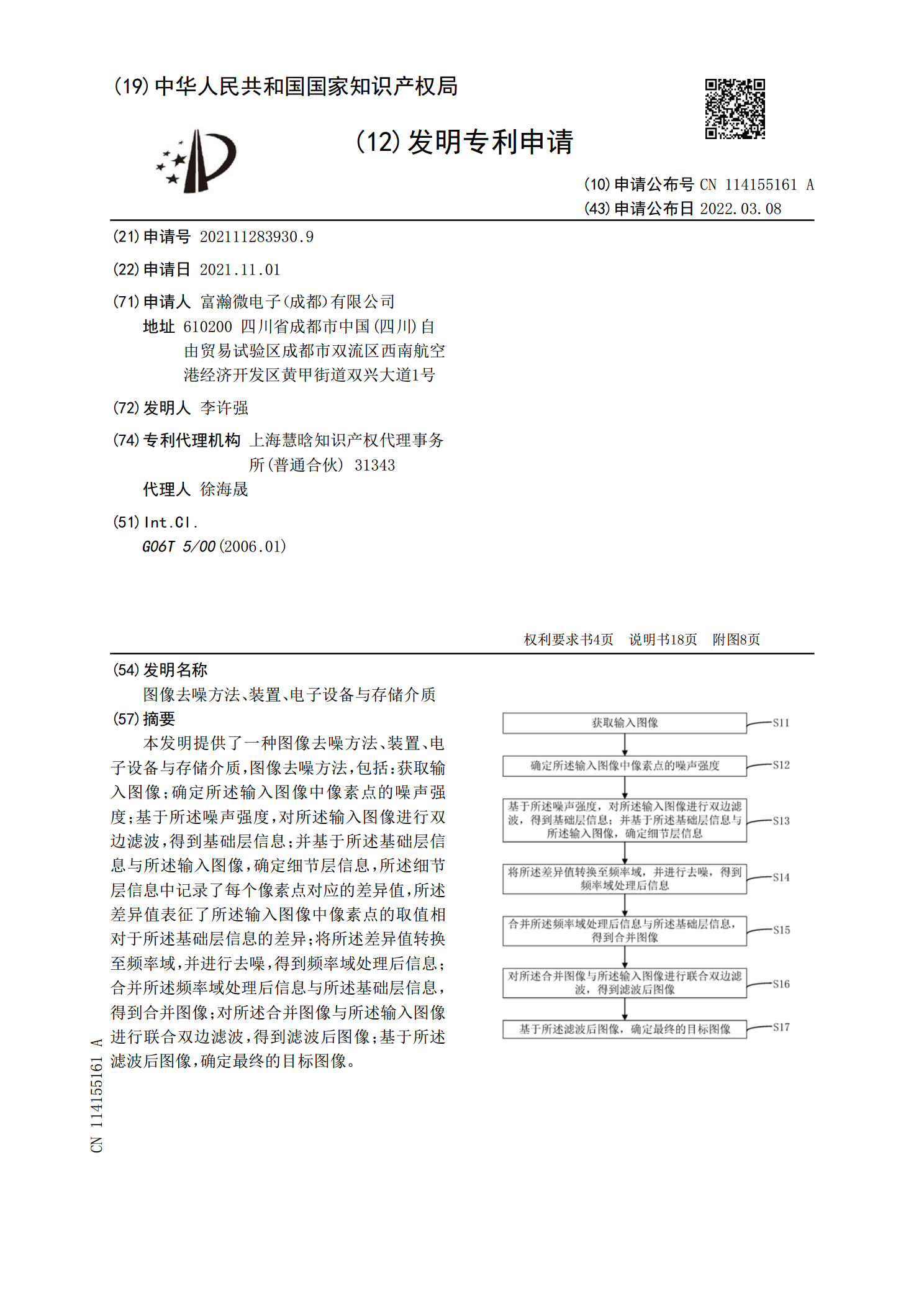
本发明提供了一种图像去噪方法、装置、电子设备与存储介质,图像去噪方法,包括:获取输入图像;确定所述输入图像中像素点的噪声强度;基于所述噪声强度,对所述输入图像进行双边滤波,得到基础层信息;并基于所述基础层信息与所述输入图像,确定细节层信息,所述细节层信息中记录了每个像素点对应的差异值,所述差异值表征了所述输入图像中像素点的取值相对于所述基础层信息的差异;将所述差异值转换至频率域,并进行去噪,得到频率域处理后信息;合并所述频率域处理后信息与所述基础层信息,得到合并图像;对所述合并图像与所述输入图像进行联合双

图像去噪方法、装置、存储介质和电子设备.pdf
本公开涉及一种图像去噪方法、装置、存储介质和电子设备,属于图像处理领域,能够在把噪声去除干净的同时,非常好地保留图像的纹理细节。一种图像去噪方法,包括:获取待去噪图像阵列,该阵列中每个像素只包含一个颜色分量,在待去噪图像阵列的中心像素所在行列的隔行和/或隔列位置处存在着与中心像素相同颜色分量的中心像素隔行列像素,在紧邻中心像素的紧邻像素所在行列的隔行和/或隔列位置处存在着与紧邻像素相同颜色分量的紧邻像素隔行列像素;基于中心像素与中心像素隔行列像素的差值以及紧邻像素与紧邻像素隔行列像素的差值,确定各个中心像