
一种基于无网格传感平面的柔性多模态触觉感知系统.pdf

春波****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于无网格传感平面的柔性多模态触觉感知系统.pdf
本发明公开了一种基于无网格传感平面的柔性多模态触觉感知系统,其中无网格柔性平面传感模块用于感知多模态触觉信息并转化为电阻信息,边缘电极模块包括N根电极,均嵌入在无网格柔性平面传感模块边缘,N根电极分布式排列,互相均不接触,任意两根电极组成一个电阻通道,电阻测量电路模块用于记录边缘电极模块中多路通道电阻变化信息并输入神经网络模块;神经网络模块用于输出多模态触觉信息。本发明的技术方案中采用多根边缘电极相互组成电阻测量通道,电阻测量通道数影响多模态触觉信息的感知精度,在保留精度的情况下能够显著减少电极数量,避免

一种基于多模态感知技术的上下料系统.pdf
本发明公开了一种基于多模态感知技术的上下料系统,包括传送带、称重传感器、视觉传感器、光电传感器、温度传感器、声波传感器以及上下料系统,利用声波传感器,对执行上下料的机器人进行监控,解决上下料机器人故障信息反馈不及时的问题;利用视觉传感器检测加工完成的产品进行检测,有效解决人工检测误差大、传统接触式自动检测方法有位置盲区的问题;以光电传感器为定点位置传感器、以温度传感器检测加工环境温度和设备温度、以高精度重力传感器作为加工工件称重传感器,完善整个加工工件的生产流程。
一种基于多模态融合的自主系统感知方法及系统.pdf
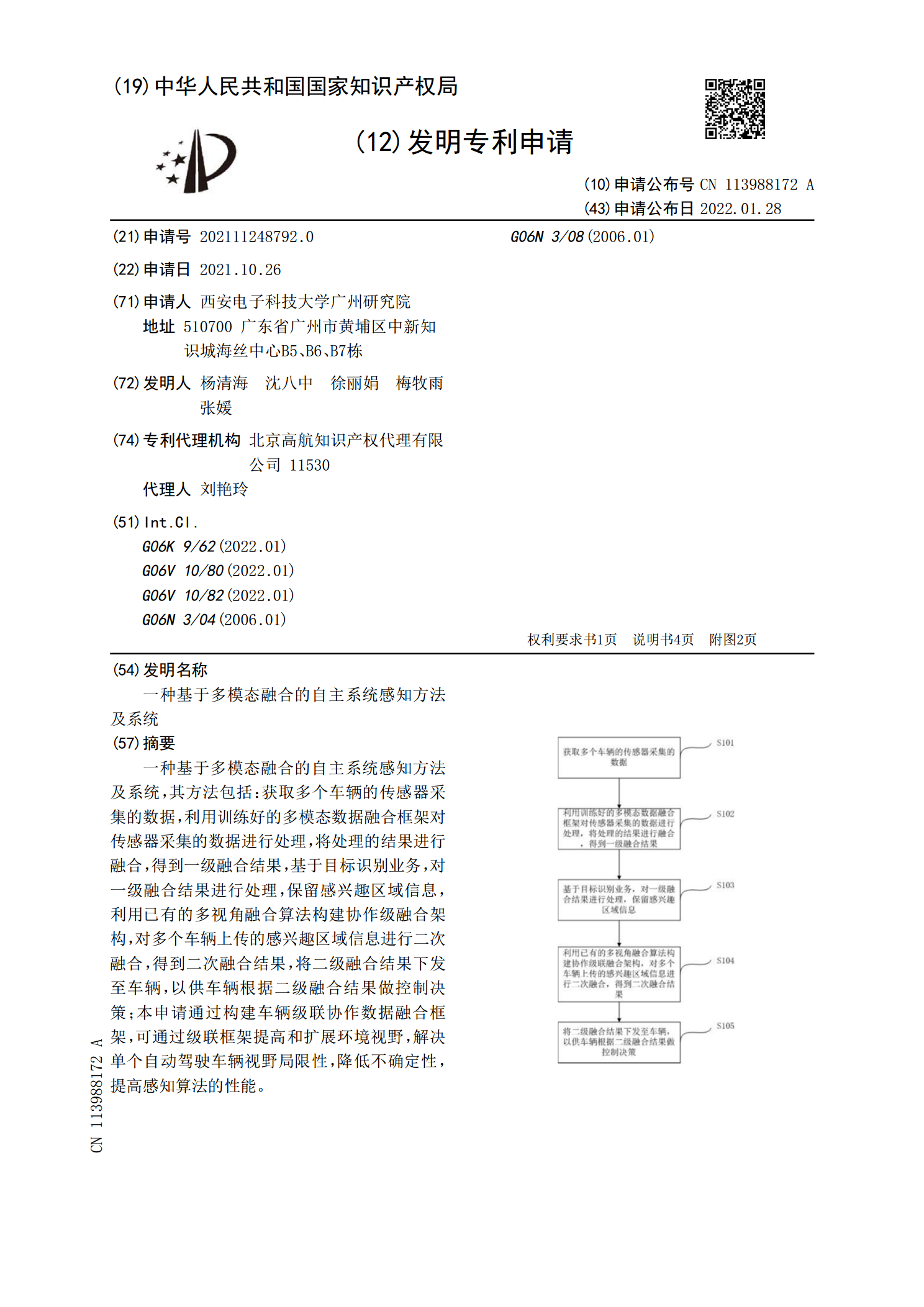
一种基于多模态融合的自主系统感知方法及系统,其方法包括:获取多个车辆的传感器采集的数据,利用训练好的多模态数据融合框架对传感器采集的数据进行处理,将处理的结果进行融合,得到一级融合结果,基于目标识别业务,对一级融合结果进行处理,保留感兴趣区域信息,利用已有的多视角融合算法构建协作级融合架构,对多个车辆上传的感兴趣区域信息进行二次融合,得到二次融合结果,将二级融合结果下发至车辆,以供车辆根据二级融合结果做控制决策;本申请通过构建车辆级联协作数据融合框架,可通过级联框架提高和扩展环境视野,解决单个自动驾驶车辆

一种基于智能轮胎触觉感知的智能汽车感知系统.pdf
本发明提供一种基于智能轮胎触觉感知的智能汽车感知系统,包括智能轮胎(1)、视觉感知系统(2)、雷达设备(3)、计算机视觉单元(4)、轮胎信息处理单元(5)、传感器融合单元(6)、电子线路(7)、无线数据传输装置(8)以及整车控制单元(9),车辆行驶在路面时,“视觉”方面,通过摄像头结合计算机视觉技术进行物体识别和辅助定位;“听觉”方面,通过雷达、激光雷达进行定位、测速和障碍物监测;“触觉”方面,通过智能轮胎感知路面信息,用传感器融合技术将以上信息进行融合,生成一个全面感知、及时反馈的车辆环境状态,包含了周

一种基于柔性触觉传感器的单手定点盲文输入系统和方法.pdf
本发明公开了一种基于柔性触觉传感器的单手定点盲文输入系统和方法。柔性触觉输入键盘和采集电路电连接,采集电路和电子设备无线连接;柔性触觉输入键盘被施加压力,产生的压力电阻信号传输至采集电路中并转换为电压数据,电压数据无线传输至电子设备中,被电子设备转换为触觉力信号并存储识别转换为盲文字符,进而转换为字母进行显示输出。本发明用以辅助视觉障碍用户实现盲文输入,符合用户穿戴习惯,适用于多设备、便于携带、结构简单、使用方便,针对视觉障碍用户,在原有输入习惯基础上,减少按键手指的数量为单手手指的数量,且用户无需重复性