
一种基于多模态融合的自主系统感知方法及系统.pdf

春岚****23


1/8

2/8
3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于多模态融合的自主系统感知方法及系统.pdf
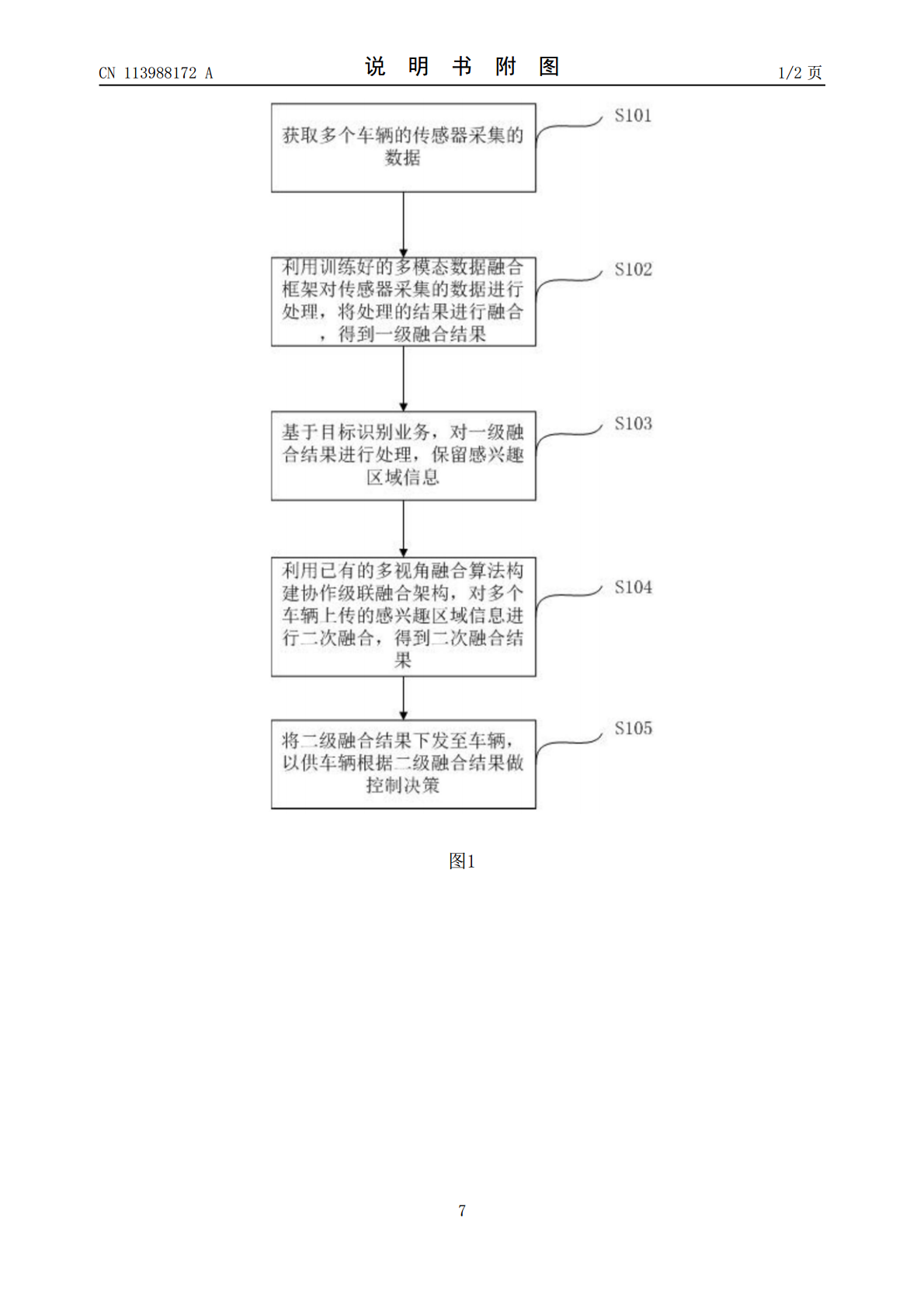
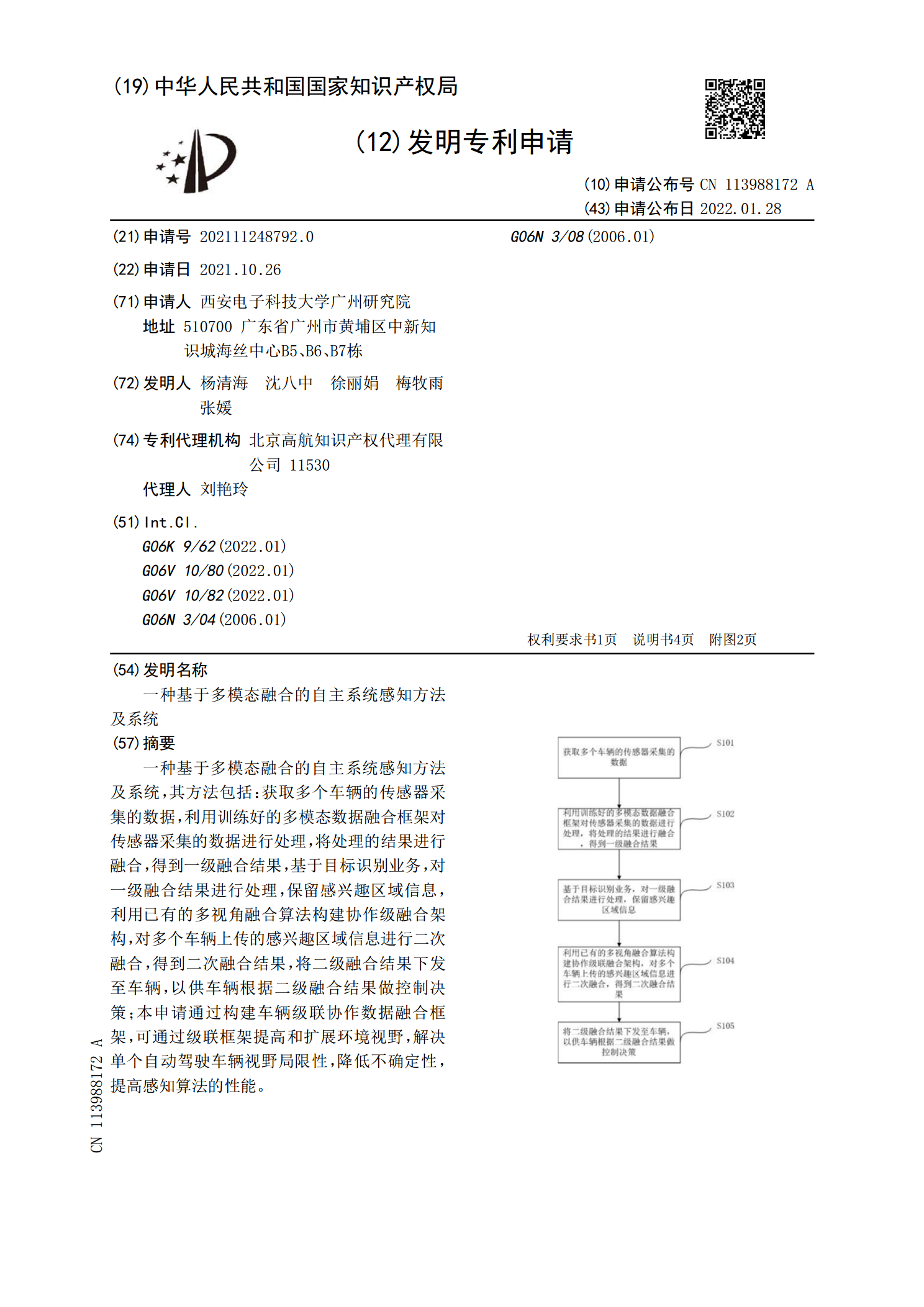
一种基于多模态融合的自主系统感知方法及系统,其方法包括:获取多个车辆的传感器采集的数据,利用训练好的多模态数据融合框架对传感器采集的数据进行处理,将处理的结果进行融合,得到一级融合结果,基于目标识别业务,对一级融合结果进行处理,保留感兴趣区域信息,利用已有的多视角融合算法构建协作级融合架构,对多个车辆上传的感兴趣区域信息进行二次融合,得到二次融合结果,将二级融合结果下发至车辆,以供车辆根据二级融合结果做控制决策;本申请通过构建车辆级联协作数据融合框架,可通过级联框架提高和扩展环境视野,解决单个自动驾驶车辆
一种基于多模态融合的肿瘤分类方法及系统.pdf
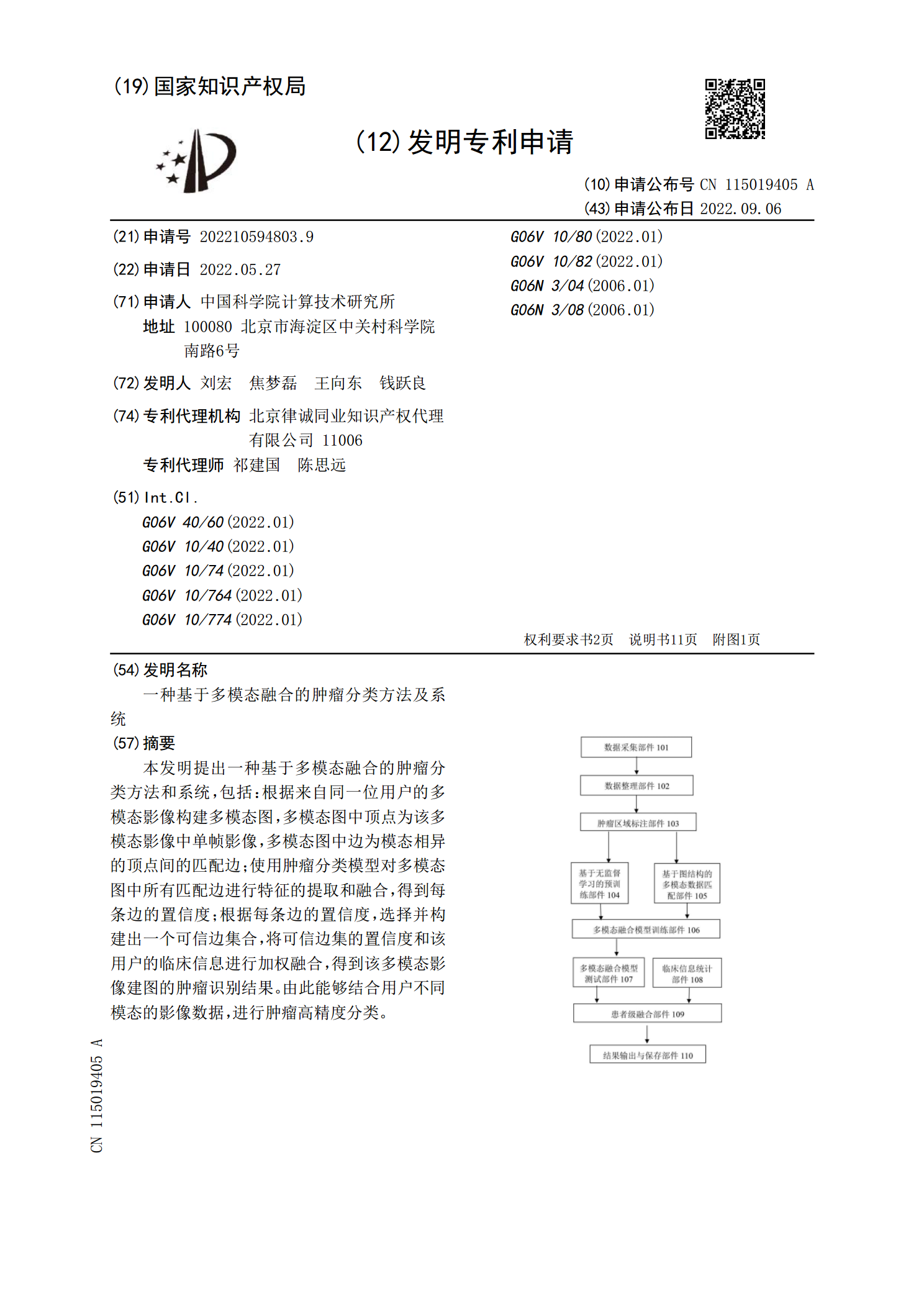
本发明提出一种基于多模态融合的肿瘤分类方法和系统,包括:根据来自同一位用户的多模态影像构建多模态图,多模态图中顶点为该多模态影像中单帧影像,多模态图中边为模态相异的顶点间的匹配边;使用肿瘤分类模型对多模态图中所有匹配边进行特征的提取和融合,得到每条边的置信度;根据每条边的置信度,选择并构建出一个可信边集合,将可信边集的置信度和该用户的临床信息进行加权融合,得到该多模态影像建图的肿瘤识别结果。由此能够结合用户不同模态的影像数据,进行肿瘤高精度分类。

一种基于多模态特征融合的证照分类方法及系统.pdf
本发明提供了一种基于多模态特征融合的证照分类方法及系统,该方法充分考虑证照图像含有视觉特征、文本语义特征、文本位置特征等多模态信息的特点,充分利用多模态信息,以及各个模态之间的相互关系,通过构建卷积神经网络提取视觉特征,转化成视觉特征向量;根据证照中独特的文本信息训练语言模型,将证照图像中的文本转化为文本信息向量,对得到的视觉特征向量和文本信息向量进行多模态融合,既能保留原始单模态视觉特征和文本信息,同时也能利用两种模态之间的相互作用,作为分类的依据。本发明不仅考虑证照图像的视觉特征,同时充分考虑文本信息
一种基于多模态信息融合的异常行为检测系统及方法.pdf
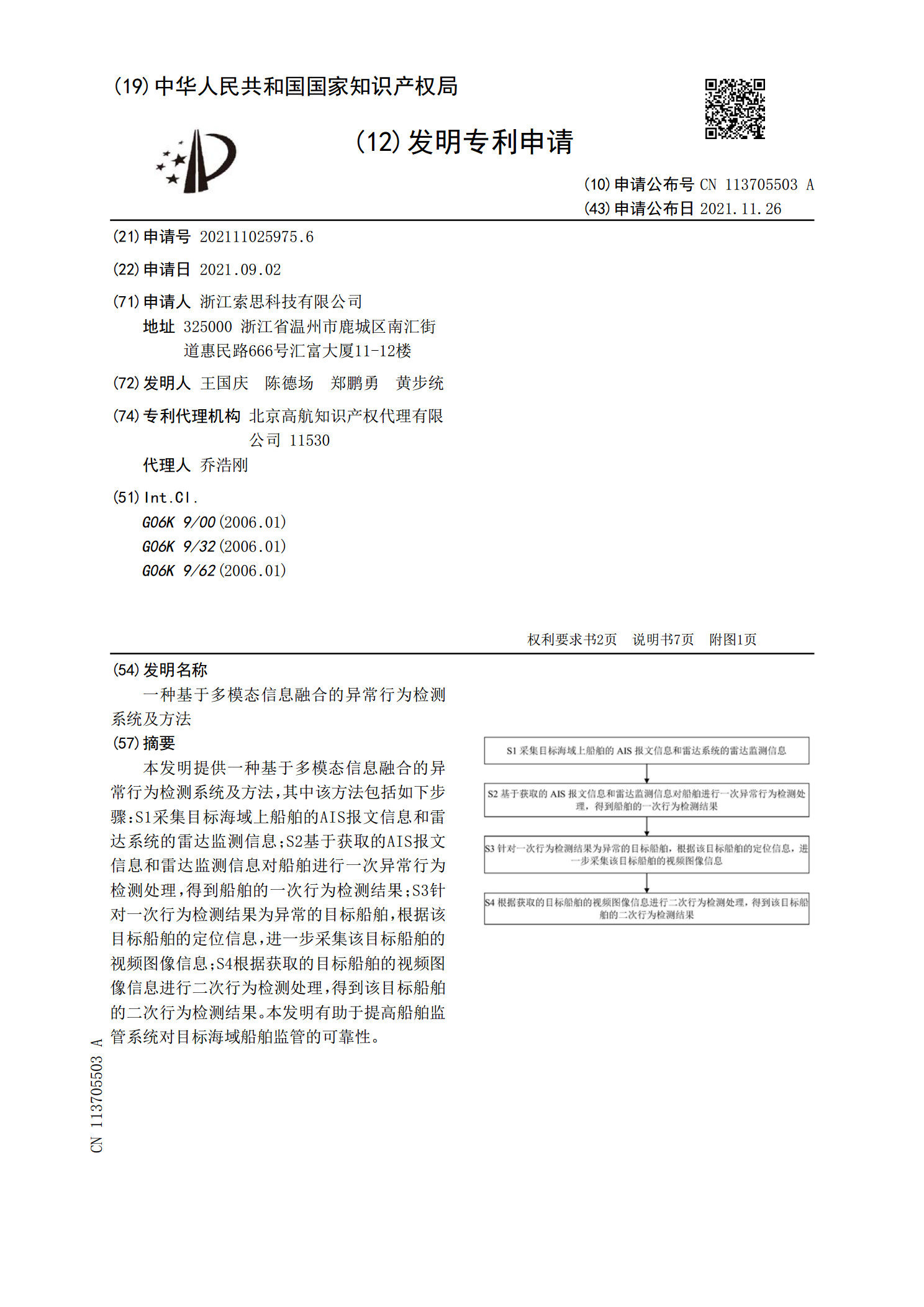
本发明提供一种基于多模态信息融合的异常行为检测系统及方法,其中该方法包括如下步骤:S1采集目标海域上船舶的AIS报文信息和雷达系统的雷达监测信息;S2基于获取的AIS报文信息和雷达监测信息对船舶进行一次异常行为检测处理,得到船舶的一次行为检测结果;S3针对一次行为检测结果为异常的目标船舶,根据该目标船舶的定位信息,进一步采集该目标船舶的视频图像信息;S4根据获取的目标船舶的视频图像信息进行二次行为检测处理,得到该目标船舶的二次行为检测结果。本发明有助于提高船舶监管系统对目标海域船舶监管的可靠性。

一种基于多模态感知技术的上下料系统.pdf
本发明公开了一种基于多模态感知技术的上下料系统,包括传送带、称重传感器、视觉传感器、光电传感器、温度传感器、声波传感器以及上下料系统,利用声波传感器,对执行上下料的机器人进行监控,解决上下料机器人故障信息反馈不及时的问题;利用视觉传感器检测加工完成的产品进行检测,有效解决人工检测误差大、传统接触式自动检测方法有位置盲区的问题;以光电传感器为定点位置传感器、以温度传感器检测加工环境温度和设备温度、以高精度重力传感器作为加工工件称重传感器,完善整个加工工件的生产流程。