
控制无级变速器中的传动比变化率的方法.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

控制无级变速器中的传动比变化率的方法.pdf
提供了一种用于控制具有无级变速器(14)的机器(10)中的传动比变化率的方法。该方法包括使操作员输入装置(30,34,36)移动到改变后的位置(114,124,134,144,154,164,167),接收指示改变后的位置(114,124,134,144,154,164,167)的电子数据,以及至少部分基于改变后的位置(114,124,134,144,154,164,167)而确定不受限的期望传动比。从电子存储的传动比变化率映射图(110,120,130,140,150,160,165)选择与所述改变后的

无级变速器传动比控制.pdf
公开了一种无级变速器传动比控制。提供一种车辆,所述车辆包括具有相关联的发动机速度传感器的发动机以及均具有各自的车轮速度传感器的车轮。车辆还包括连接到发动机并被构造成以可变的输入输出传动比运转的无级变速器。至少一个控制器被配置成:响应于发动机速度传感器指示发动机以怠速转速运转且车轮速度传感器指示车轮转速大约为零,减小无级变速器的运转传动比。由于在减小传动比可能是不被接受的车辆起步的状况期间减小传动比是可能的,因此这在车辆中提供减小的噪声、振动和声振粗糙度。
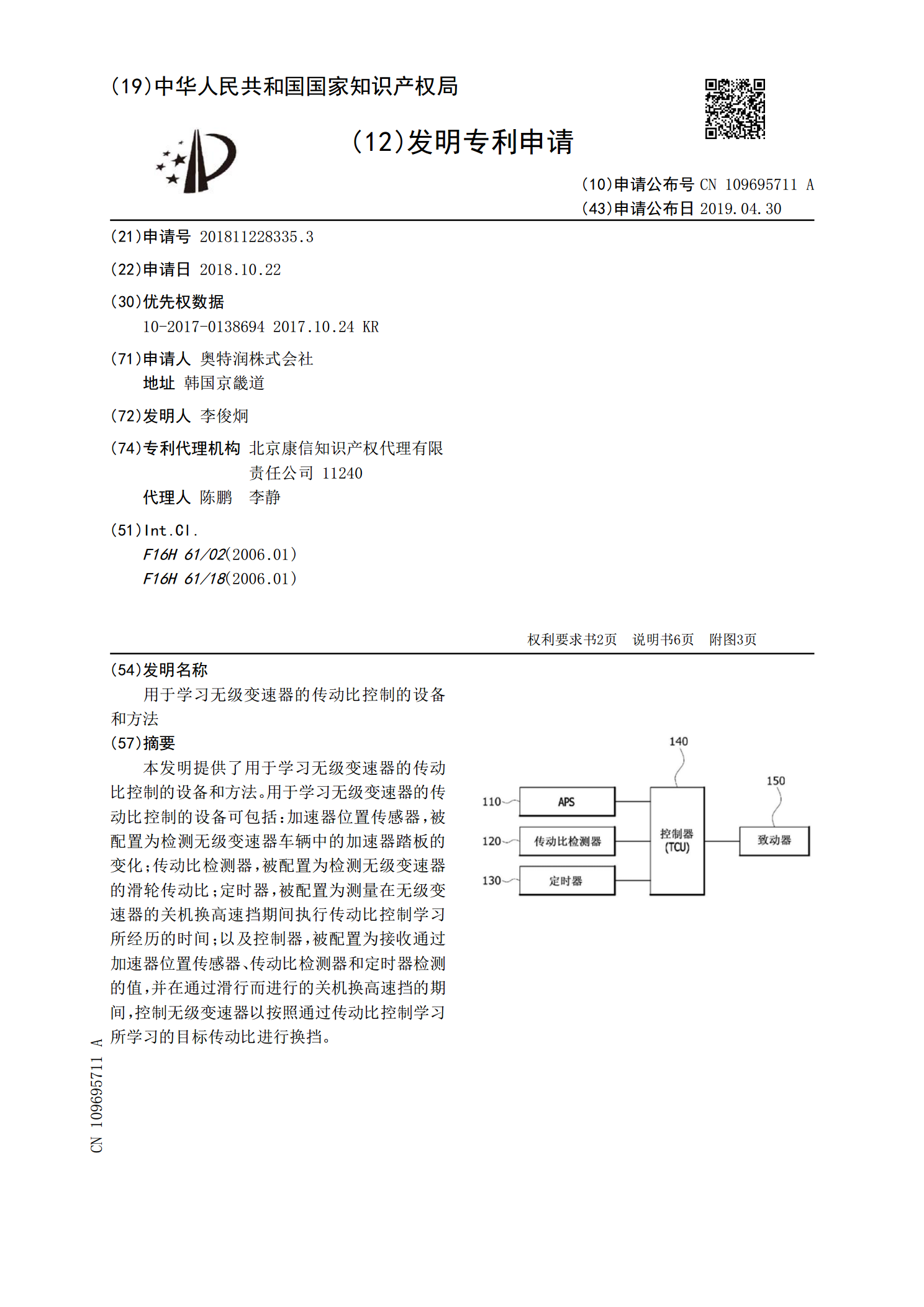
用于学习无级变速器的传动比控制的设备和方法.pdf
本发明提供了用于学习无级变速器的传动比控制的设备和方法。用于学习无级变速器的传动比控制的设备可包括:加速器位置传感器,被配置为检测无级变速器车辆中的加速器踏板的变化;传动比检测器,被配置为检测无级变速器的滑轮传动比;定时器,被配置为测量在无级变速器的关机换高速挡期间执行传动比控制学习所经历的时间;以及控制器,被配置为接收通过加速器位置传感器、传动比检测器和定时器检测的值,并在通过滑行而进行的关机换高速挡的期间,控制无级变速器以按照通过传动比控制学习所学习的目标传动比进行换挡。
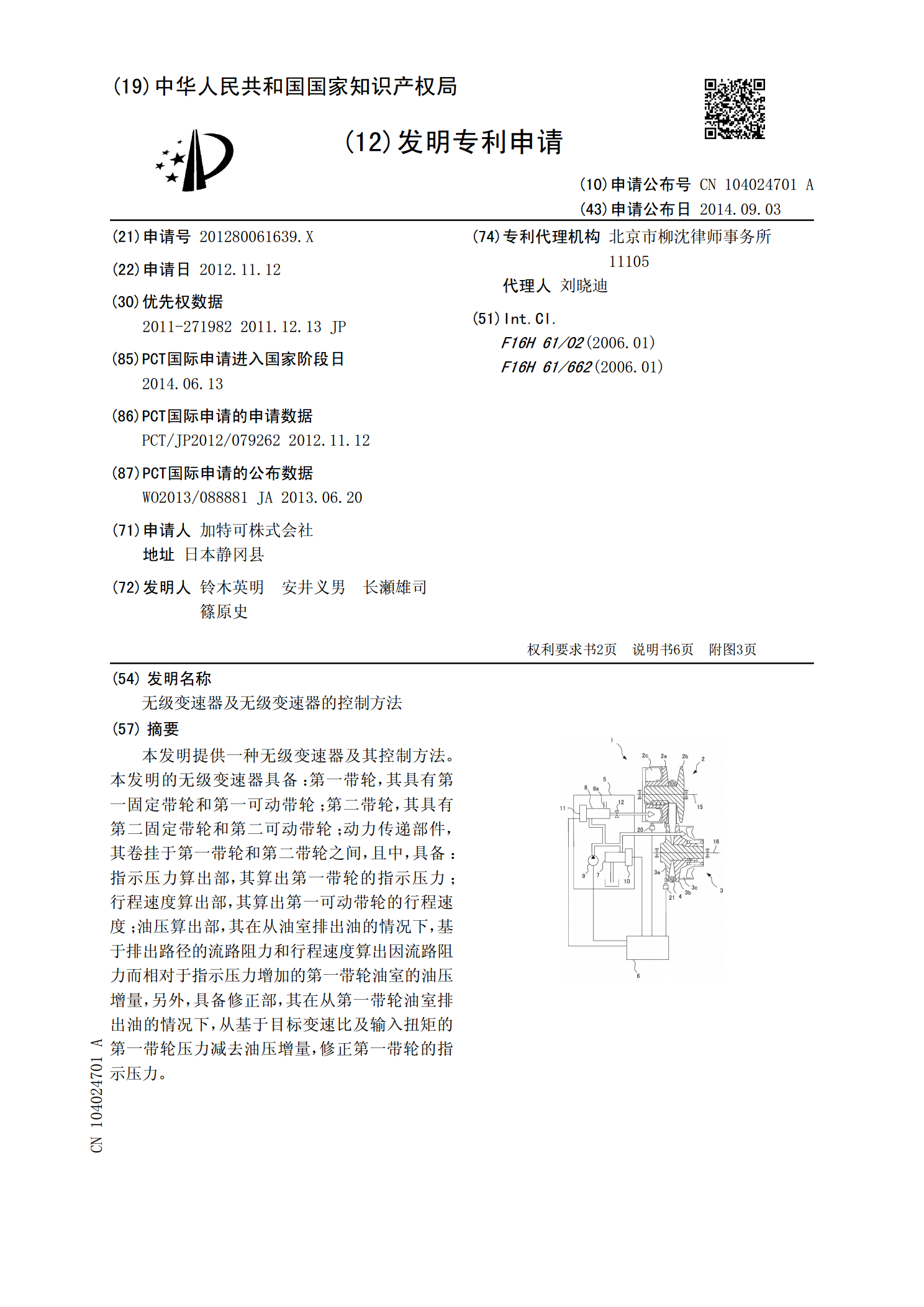
无级变速器及无级变速器的控制方法.pdf
本发明提供一种无级变速器及其控制方法。本发明的无级变速器具备:第一带轮,其具有第一固定带轮和第一可动带轮;第二带轮,其具有第二固定带轮和第二可动带轮;动力传递部件,其卷挂于第一带轮和第二带轮之间,且中,具备:指示压力算出部,其算出第一带轮的指示压力;行程速度算出部,其算出第一可动带轮的行程速度;油压算出部,其在从油室排出油的情况下,基于排出路径的流路阻力和行程速度算出因流路阻力而相对于指示压力增加的第一带轮油室的油压增量,另外,具备修正部,其在从第一带轮油室排出油的情况下,从基于目标变速比及输入扭矩的第一

无级变速器及无级变速器的控制方法.pdf
本发明提供一种无级变速器及其控制方法。本发明的无级变速器具备:第一判定部,其判定在升档中初级带轮压力的指示压力是否为管路压力;指示压力控制部,其在判定目标变速速度为规定的变速速度以下的情况、且判定为变速比并非目标变速比的情况下,仅使初级带轮压力的指示压力比管路压力高;推定时间检测部,其检测判定目标变速速度为规定的变速速度以下,且使初级带轮压力的指示压力比管路压力高之后,直至可认为初级带轮压力与管路压力同等的规定时间,指示压力控制部在经过所推定的规定时间后,算出初级带轮压力的指示压力和管路压力指示压力的偏差