
用于运行电机的方法和驱动装置.pdf

运升****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于运行电机的方法和驱动装置.pdf
本发明涉及一种用于运行电机的方法和驱动装置。在用于运行具有旋转编码器(10)的电机(6)的方法(16)中,如果在受调节的运行(18)中识别出编码器错误(30),那么就切换到受控制的运行(34)。本发明此外还涉及一种带有变流器(4)和电机(6)的驱动装置(2)。

用于运行电机的方法、电机、驱动装置以及压缩机和/或涡轮机.pdf
本发明涉及一种用于运行压缩机(2)和/或涡轮机(3)的电机(10)的方法,所述电机具有布置在以能旋转的方式在壳体(6)中得到支承的轴(5)上的转子(11)以及以固定在壳体上的方式布置的定子(12),其中所述定子(12)具有尤其多相的驱动绕组(17),并且其中在空转运行中至少暂时地停止对于所述驱动绕组(17)的操控。在此规定,就旋转运动对所述轴(5)和/或所述转子(11)进行监控,并且在检测到所述轴(5)和/或转子(11)的停止状态或者在其面临停止状态时如此操控所述驱动绕组(17),从而将所述转子(11)至

用于运行驱动装置的方法和装置、驱动装置、机动车.pdf
本发明涉及一种用于运行机动车的驱动装置(1)的方法,所述驱动装置具有往复活塞式马达(2)和废气涡轮增压器(5),其中在负荷运行中所述往复活塞式马达(2)以4冲程‑运行模式来运行,并且其中所述废气涡轮增压器(5)具有电机(12)、尤其是介质间隙机,所述电机在所述往复活塞式马达(2)的滑行运行中按发电机方式来运行。在此规定,在滑行运行中所述往复活塞式马达(2)以2冲程‑运行模式来运行。
用于运行驱动系和控制装置的方法.pdf
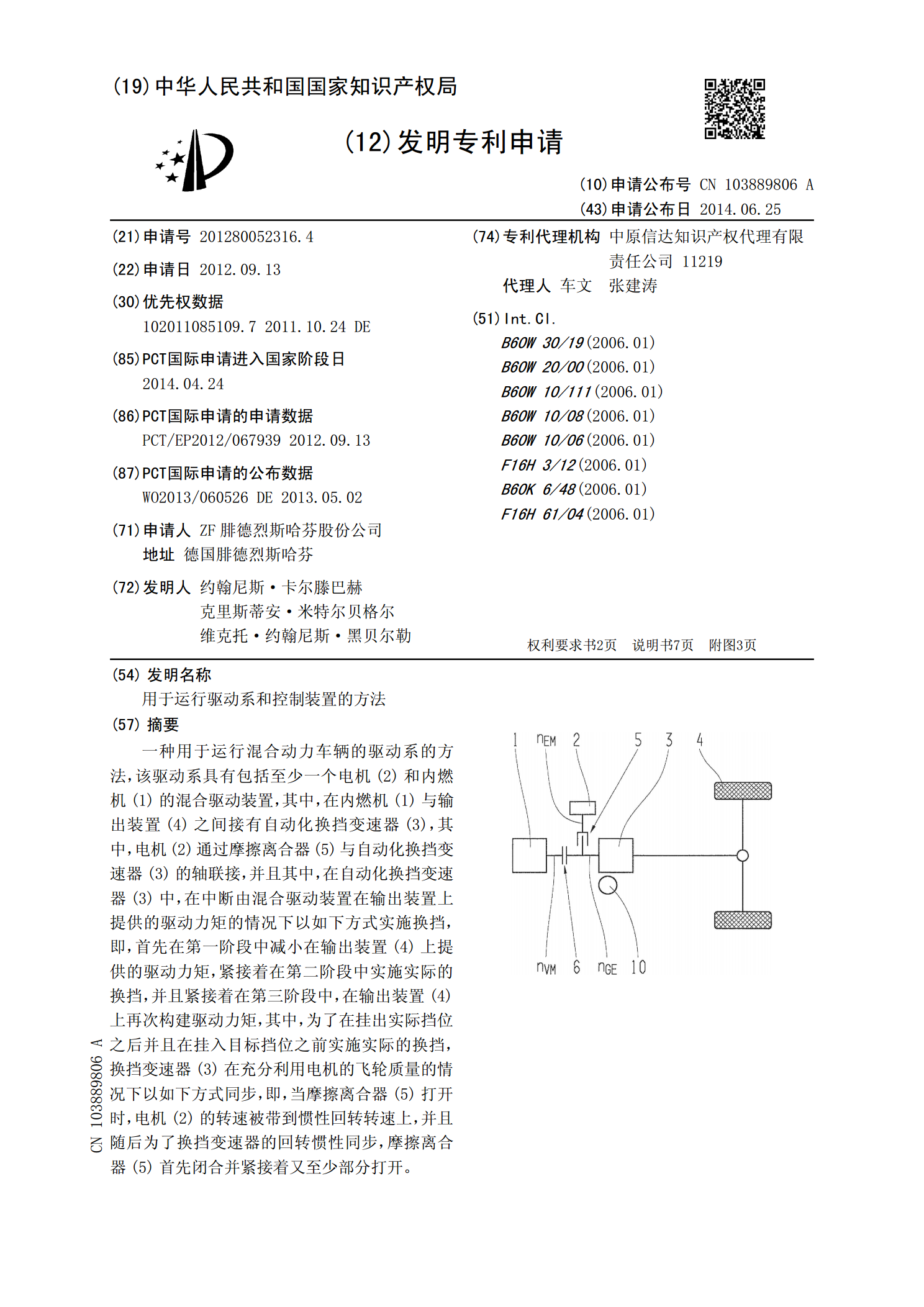
一种用于运行混合动力车辆的驱动系的方法,该驱动系具有包括至少一个电机(2)和内燃机(1)的混合驱动装置,其中,在内燃机(1)与输出装置(4)之间接有自动化换挡变速器(3),其中,电机(2)通过摩擦离合器(5)与自动化换挡变速器(3)的轴联接,并且其中,在自动化换挡变速器(3)中,在中断由混合驱动装置在输出装置上提供的驱动力矩的情况下以如下方式实施换挡,即,首先在第一阶段中减小在输出装置(4)上提供的驱动力矩,紧接着在第二阶段中实施实际的换挡,并且紧接着在第三阶段中,在输出装置(4)上再次构建驱动力矩,其中

用于运行具有可电驱动的轴的驱动装置的装置和方法.pdf
本发明涉及一种用于机动车的装置和方法,所述机动车具有电机(103)和可以由这个电机(103)驱动的轴(101)。在可驱动的轴(101)之间设置一个可分开的机械耦合器。这个耦合器设计成可切换的自由轮(102)。此外设有用于执行一种监控方案(200)的机构(106)。